



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
采用 FxLMS 算法的有源噪声控制系统是一种先进的噪声控制技术。 该系统的核心是 FxLMS(Filtered-x Least Mean Square)算法。这一算法通过对输入的噪声信号进行分析和处理,以实现有效的噪声消除。 有源噪声控制系统通常由传感器、控制器和执行器组成。传感器用于检测噪声信号,将其转换为电信号输入到控制器中。控制器利用 FxLMS 算法对输入信号进行计算和处理,生成控制信号。执行器则根据控制信号产生与噪声相反的声波,从而实现对噪声的抵消。 FxLMS 算法具有自适应能力,能够根据噪声环境的变化实时调整控制参数,以保持良好的噪声控制效果。它可以处理各种类型的噪声,包括稳态噪声、非稳态噪声和随机噪声等。 这种有源噪声控制系统在许多领域具有广泛的应用前景。例如,在工业环境中,可以降低机器设备产生的噪声,提高工作环境的舒适度和安全性;在交通运输领域,可以减少车辆、飞机等交通工具的噪声,提升乘坐体验;在音频设备中,可以改善音质,降低背景噪声的干扰。 总之,采用 FxLMS 算法的有源噪声控制系统是一种高效、灵活的噪声控制解决方案,为改善噪声环境提供了有力的技术支持。
📚2 运行结果
主函数部分代码:
clear
T=1000;
% We do not know P(z) and S(z) in reality. So we have to make dummy paths
Pw=[0.01 0.25 0.5 1 0.5 0.25 0.01];
Sw=Pw*0.25;
% Remember that the first task is to estimate S(z). So, we can generate a
% white noise signal,
x_iden=randn(1,T);
% send it to the actuator, and measure it at the sensor position,
y_iden=filter(Sw, 1, x_iden);
% Then, start the identification process
Shx=zeros(1,16); % the state of Sh(z)
Shw=zeros(1,16); % the weight of Sh(z)
e_iden=zeros(1,T); % data buffer for the identification error
% and apply least mean square algorithm
mu=0.1; % learning rate
for k=1:T, % discrete time k
Shx=[x_iden(k) Shx(1:15)]; % update the state
Shy=sum(Shx.*Shw); % calculate output of Sh(z)
e_iden(k)=y_iden(k)-Shy; % calculate error
Shw=Shw+mu*e_iden(k)*Shx; % adjust the weight
end
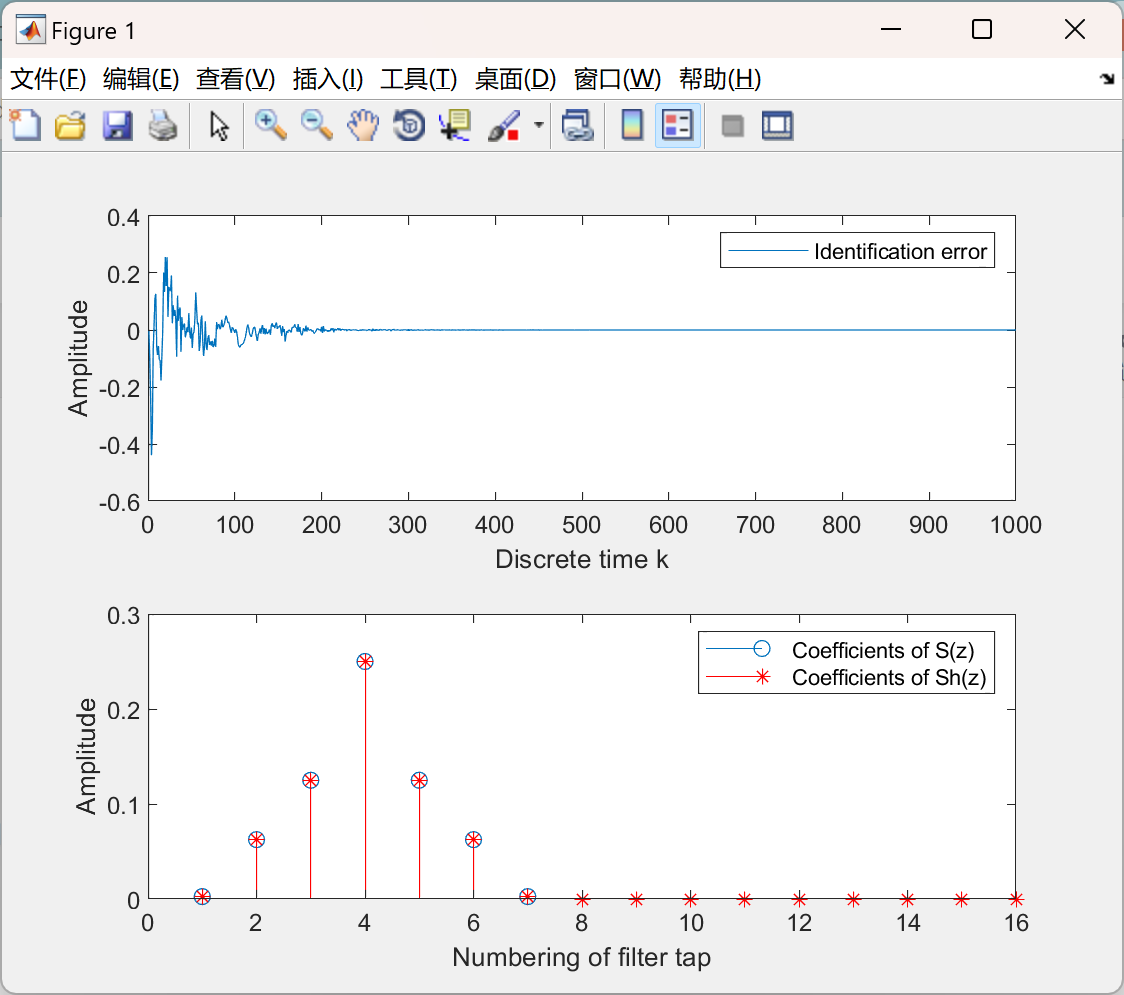
% Lets check the result
subplot(2,1,1)
plot([1:T], e_iden)
ylabel('Amplitude');
xlabel('Discrete time k');
legend('Identification error');
subplot(2,1,2)
stem(Sw)
hold on
stem(Shw, 'r*')
ylabel('Amplitude');
xlabel('Numbering of filter tap');
legend('Coefficients of S(z)', 'Coefficients of Sh(z)')
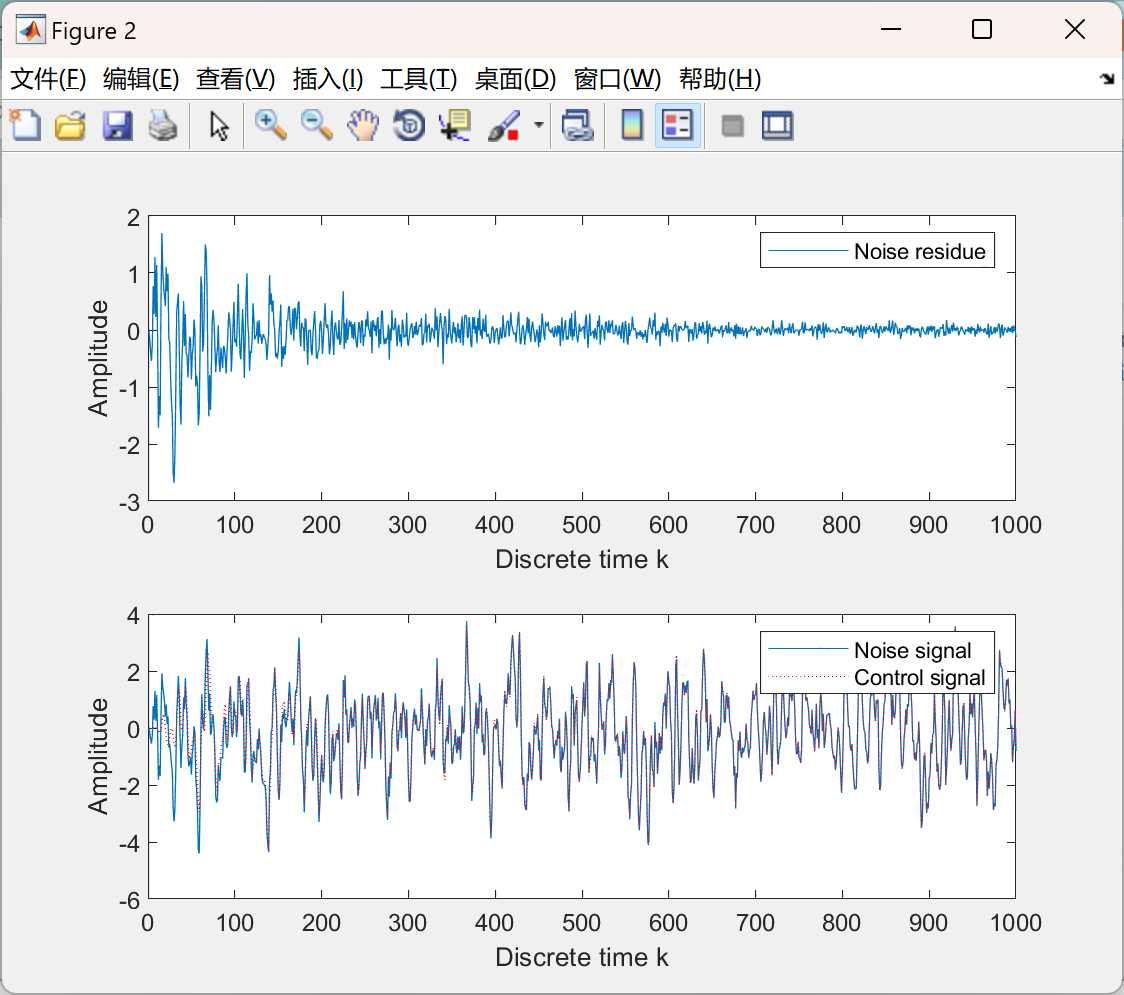
% The second task is the active control itself. Again, we need to simulate
% the actual condition. In practice, it should be an iterative process of
% 'measure', 'control', and 'adjust'; sample by sample. Now, let's generate
% the noise:
X=randn(1,T);
% and measure the arriving noise at the sensor position,
Yd=filter(Pw, 1, X);
% Initiate the system,
Cx=zeros(1,16); % the state of C(z)
Cw=zeros(1,16); % the weight of C(z)
Sx=zeros(size(Sw)); % the dummy state for the secondary path
e_cont=zeros(1,T); % data buffer for the control error
Xhx=zeros(1,16); % the state of the filtered x(k)
% and apply the FxLMS algorithm
mu=0.1; % learning rate
for k=1:T, % discrete time k
Cx=[X(k) Cx(1:15)]; % update the controller state
Cy=sum(Cx.*Cw); % calculate the controller output
Sx=[Cy Sx(1:length(Sx)-1)]; % propagate to secondary path
e_cont(k)=Yd(k)-sum(Sx.*Sw); % measure the residue
Shx=[X(k) Shx(1:15)]; % update the state of Sh(z)
Xhx=[sum(Shx.*Shw) Xhx(1:15)]; % calculate the filtered x(k)
Cw=Cw+mu*e_cont(k)*Xhx; % adjust the controller weight
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]秦志峰.酒店建筑空调系统的设计研究[J].江苏建材,2024,(05):69-71.
[2]殷金菊,文新海,张磊.基于等效声辐射功率和形貌优化的变速箱噪声控制[J].汽车实用技术,2024,49(20):73-76.DOI:10.16638/j.cnki.1671-7988.2024.020.014.
🌈4 Matlab代码实现


















 1145
1145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









