



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
用于送货服务的无人机是一种自动化飞行系统,旨在实现货物的安全、高效地从一个地点送达到另一个地点,而无需人员直接操作。送货服务的无人机旨在解决货物运输中的最后一英里问题,可以应用于快递、物流、紧急医疗援助等领域。其任务包括从配送中心或者指定地点获取货物,飞行至目的地,将货物准确地投递给接收者。随着技术的不断发展和应用场景的拓展,送货服务的无人机将进一步完善和普及。未来可能出现更多针对特定场景和需求的定制化解决方案,以及与其他智能系统的深度集成,实现更高效、更智能的货物运输服务。
📚2 运行结果
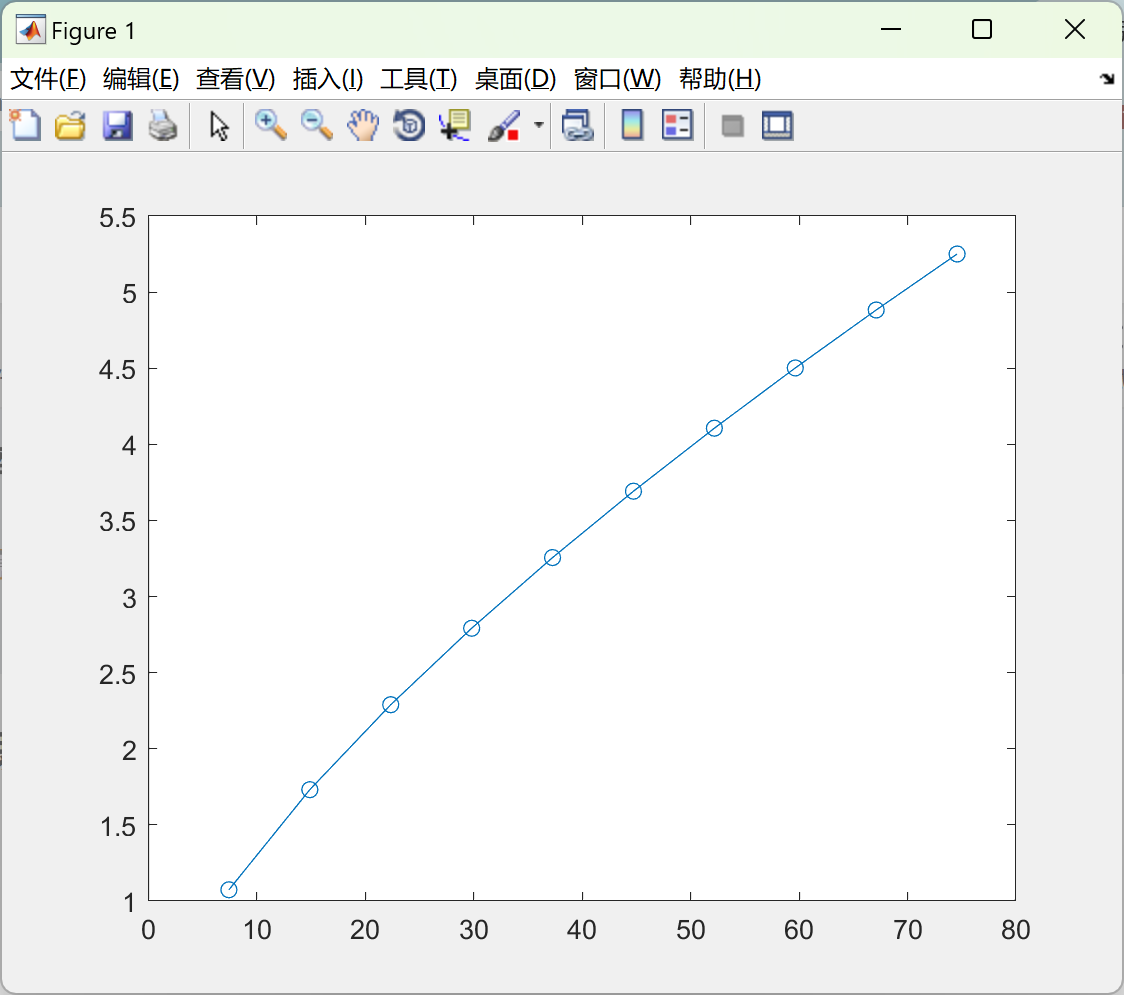
主函数部分代码:
clc;
%SETUP
W=3.52; %All-up weight of UAV in lbf
N_motors=4; %Number of motors
n=0.85; %Average efficiency of motors
RPM=8000; %Estimated setup RPM
%BATTERY
V=11; %Selected motor voltage in volts
C=5200; %Battery cell capacity in mAh
%PROPELLER
D = 10; %Propeller diameter in inches
Pitch=4.7; %Propeller pitch in inches
A=0.25*3.14*D^2; %Propeller sweep area in square inches
Aft=A*0.0069; %Propeller sweep area in square feet
%FULL THROTLE
i=1;
for P_in=0.01:0.01:0.1
PL= (P_in*n)/Aft; %Power loading equation
TL = 8.6859*power(PL,-0.3107); %Thrust loading equation
Lift = TL*(P_in*n); %Lift per Motor
LiftTotal = Lift *N_motors; %Total lift of the UAV
PinWatt=P_in*745.7; %Power input to motor in Watts
disp(PinWatt);
disp(LiftTotal);
x(i)=PinWatt;
y(i)=LiftTotal;
if LiftTotal > 2*W
break
end
i=i+1;
end
plot(x,y,'Marker','o') ;
xlswrite('1.xls',x);
xlswrite('2.xls',y);
Imotor = PinWatt/V; %Current of motor
Itot = Imotor*N_motors; %Total UAV current
PoutWatt =PinWatt*n ; %Power relation involving motor efficiency
KVreq = RPM /V; %Required KV of motor
NomKVreq = KVreq/n; %Nominal KV (labeled) of motorwhich accounts for efficiency
ESCreq = Imotor*1.2; %Required ESC current for motor
%HOVER
j=1;
for PH_in=0.01:0.01:0.1
PL_H = (PH_in*n)/Aft; %Power loading equation for hover
TL_H = 8.6859*power(PL_H,-0.3107); %Thrust loading equation for hover
Lift_H = TL_H *(PH_in*n); %Lift per motor at hover
Lift_HTotal = Lift_H*N_motors; %Total lift of the UAV at hover
PH_inWatt = PH_in*745.7; %Power input to motor at hover in Watts
disp(PH_inWatt);
disp(Lift_HTotal);
if Lift_HTotal>W
break
end
j=j+1;
end
I_Hmotor = PH_inWatt/V; %Current of motor at hover
I_Htot = I_Hmotor * N_motors; %Total hover UAV current
PH_outWatt = PH_inWatt*n; %Power relation involving motor efficiency
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]褚衍昌,王雪婷.卡车搭载无人机的同时取送货路径规划研究[J].计算机应用与软件,2023,40(12):56-63.
[2]张一鸣.疫情环境下用于物资配送的送货无人机设计[J].现代信息科技,2023,7(01):142-144.DOI:10.19850/j.cnki.2096-4706.2023.01.038.

















 186
186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









