



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
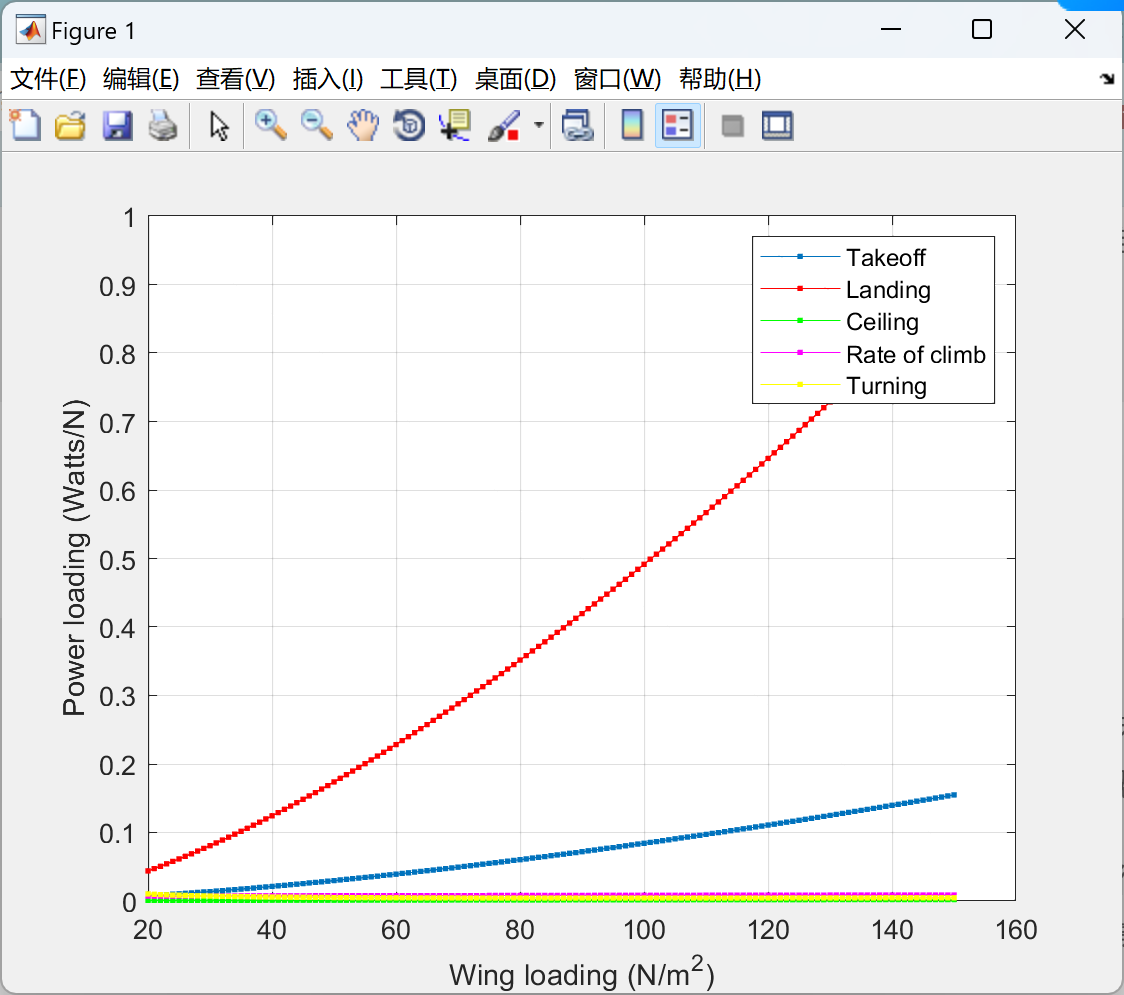
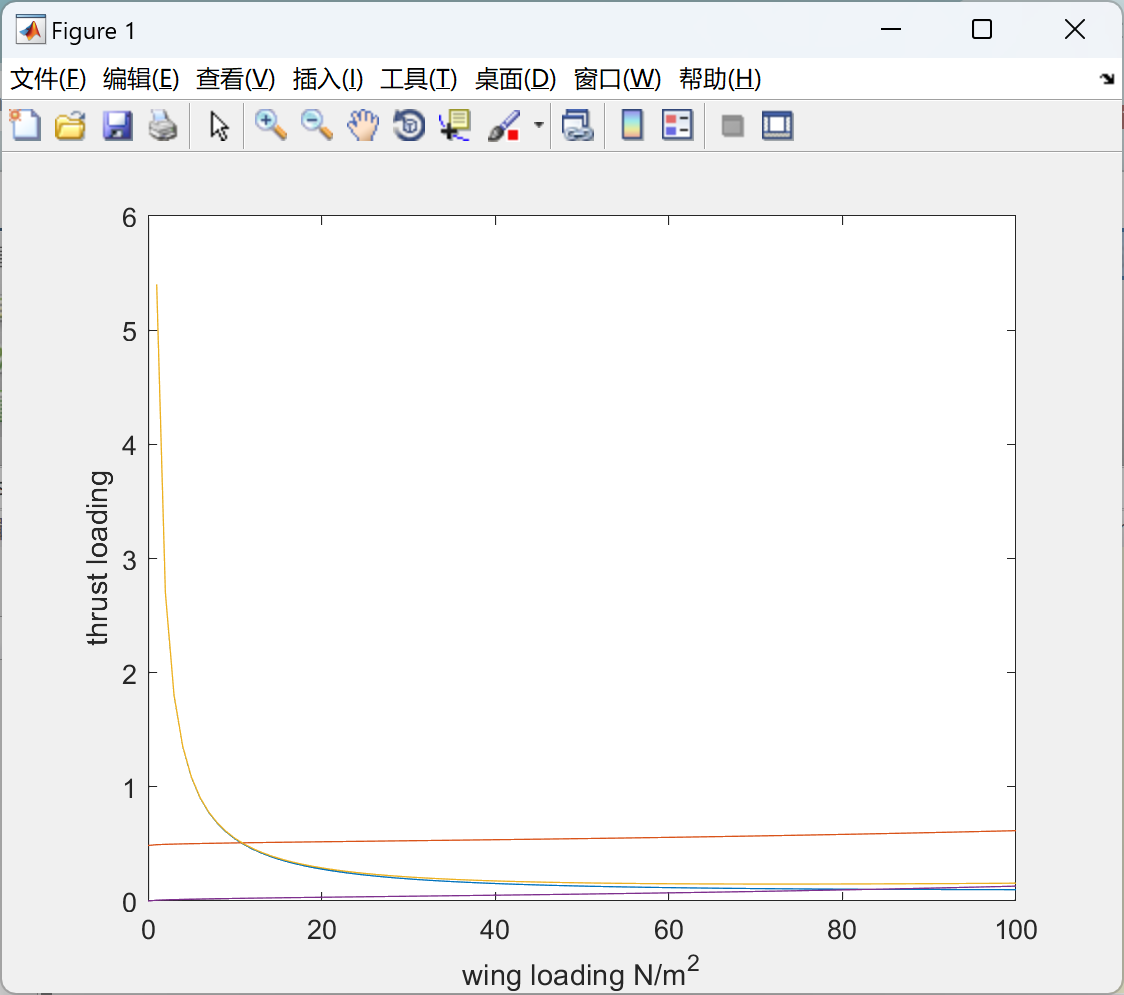
确定固定翼无人机的机翼面积和推进尺寸是设计过程中的重要步骤,这需要通过迭代方法进行优化。首先,需要明确定义设计的目标,例如飞行性能、有效载荷、续航时间等。同时,还需要考虑一些约束条件,如最大起飞重量、起降距离、速度要求等。基于目标和约束条件,建立数学模型来描述无人机的飞行性能。这包括升力、阻力、推进力、功率等的计算模型,以及与机翼面积、推进尺寸相关的参数。选择机翼面积和推进尺寸作为设计变量,并设定初始值。这些初始值可以基于经验、类似设计的数据或者初始设计的假设来确定。采用迭代优化算法,如遗传算法、粒子群算法、模拟退火算法等,对设计变量进行调整,以使得性能指标最优化或者满足设计要求。通过以上迭代选择固定翼无人机机翼面积和推进尺寸的方法,可以有效地优化设计过程,使得无人机在满足性能要求的同时,具有更好的飞行性能和经济性。
📚2 运行结果
主函数部分代码:
%%%constraint analysis 2---
clc;
clear;
%% Inputs
AR=6.5; %Aspect Ratio
e=0.85; %Oswald's efficiency
Cd0=0.0538; %Zero lift drag
nP=0.60; %Propeller efficiency
nM=0.60; %Motor efficiency
TOalt=1300; %Takeoff altitude(m)
Clmax=1.4; %Maximum lift coefficent
TOdist=10; %Takeoff distance (m)
Lalt=1300; %Landing ALtitude (m)
Ceiling=2500; %Ceiling (m)
ROCalt=60; %(m)
ROC=5; %(m/sec)
SpeedAlt=50; %(m)
V=15; %Airspeed(m/sec)
TurnAlt=50; %(m)
TurnSpeed=13; %(m/sec)
D=25.4; %propeller diameter (cm)
d=D*0.0328084; %propeller diameter (feet)
n=1.15; %Load factor
alphaBANK=acos(1/n); %Bank Angle
rhoSL=1.225; %Density at sea level (kg/m^3)
rho1300=0.995; %Density at 1300 m (kg/m^3)
rho1400=0.98; %Density at 1400 feet (kg/m^3)
K=1/(pi*e*AR); %Cd=Cd0+KCl^2
g=9.81; %accn due to gravity (m/sec^2)
alphaTO=0.84; %angle of attack TAKEOFF(radians)
alphaL=0.84; %angle of attack LANDING(radians)
alphaC=0.93; %angle of attack CEILING(radians)
alphaROC=0.9; %angle of attack ROC(radians)
sigma1300=rho1300/rhoSL; %Relative air density sigma at 1300ft sigma1400=rho1400/rhoSL; %Relative air density sigma at 1400 ft
WTO_S=20:1:150; %Wing loading (N/m^2)
LbyDmax=(1/2)*((K*Cd0)^(-0.5)); %L/Dmax
%% Assumptions
%AOA BANK = AS PER LOAD FACTOR Cos(THETA)=(1/n)
%% Takeoff condition
Vstall=((2*WTO_S./(sigma1300*rhoSL*Clmax)).^0.5) %Stall velocity
VTO=1.2*Vstall; %Takeoff velocity
PbWtoff=((0.7*VTO).^3/(2*550*alphaTO*nP*nM*g*d))/4.4482; %Power/Weight (Watts/N)
plot(WTO_S,PbWtoff,'.-'),grid on,xlabel('Wing loading (N/m^2)'),ylabel('Power loading (Watts/N)');
hold on;
%% Landing condition
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]鲁刚强. 基于植保旋翼无人机的SLAM地图构建与自主避障系统的研究[J]. 工程技术研究,2024,6(10).
[2]赵烁阳,孙 亮,张宝金,等. 基于无人机遥感智能识别技术在电力巡检中的研究[J]. 工程技术研究,2024,6(10).

















 1017
1017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









