 卡尔曼滤波在时变信道估计中的应用与Matlab实现
卡尔曼滤波在时变信道估计中的应用与Matlab实现




💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
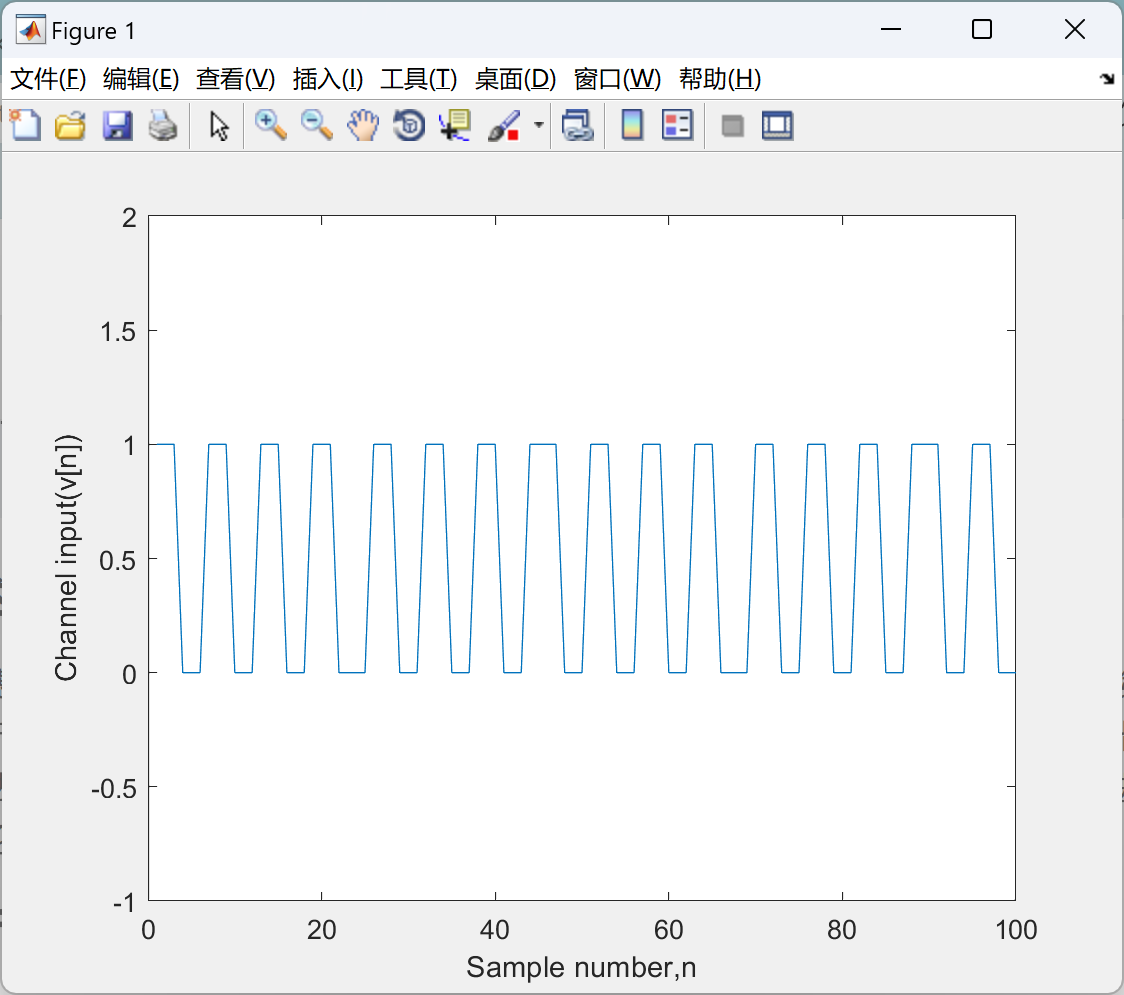
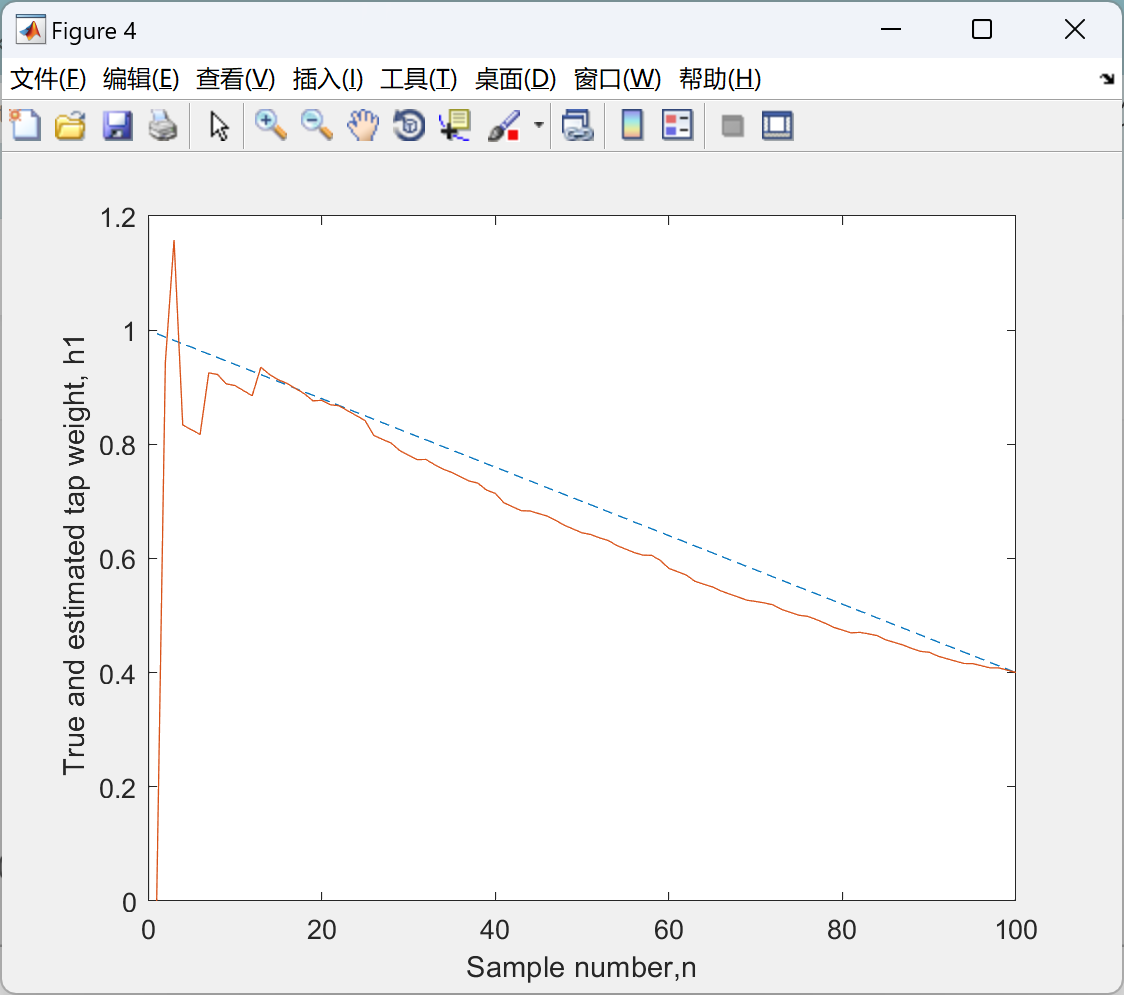
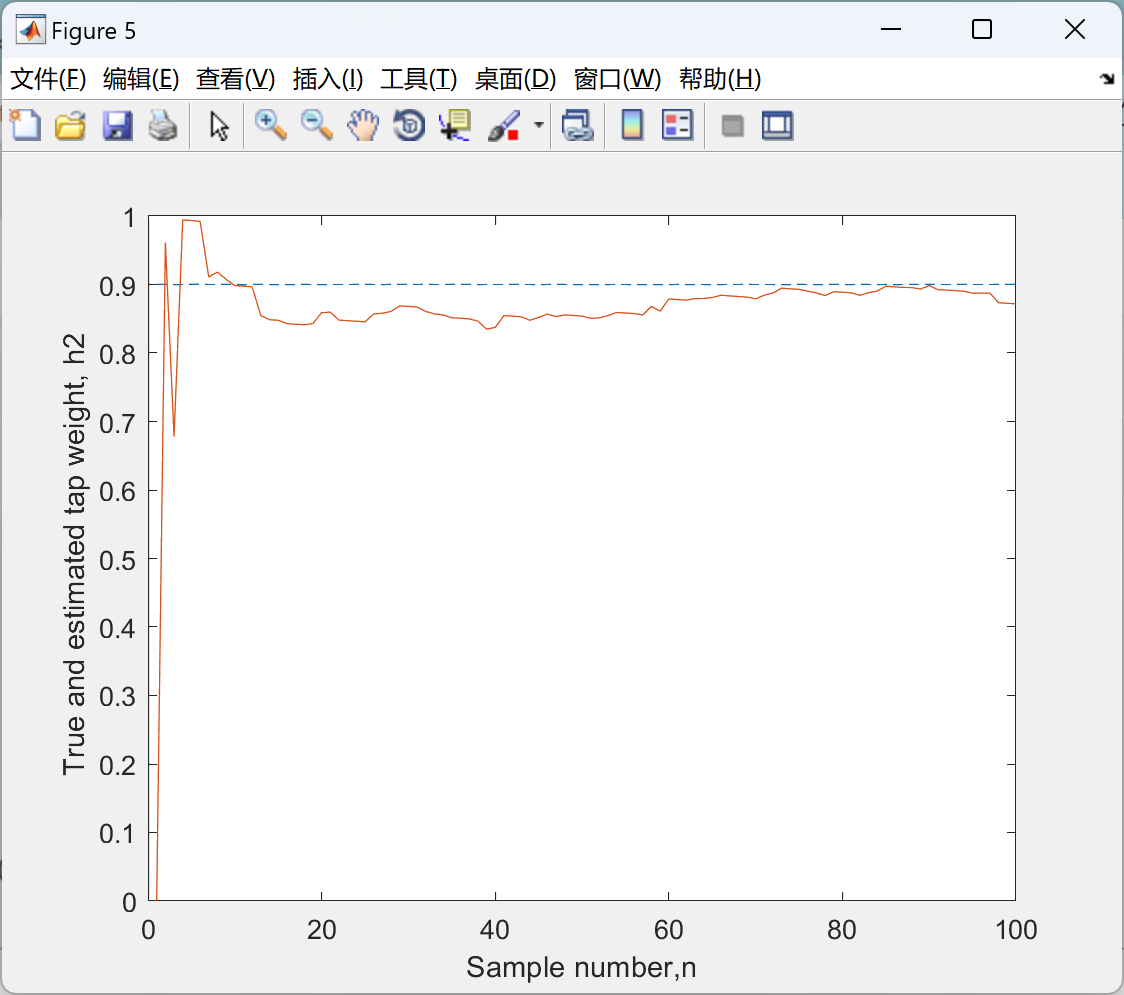
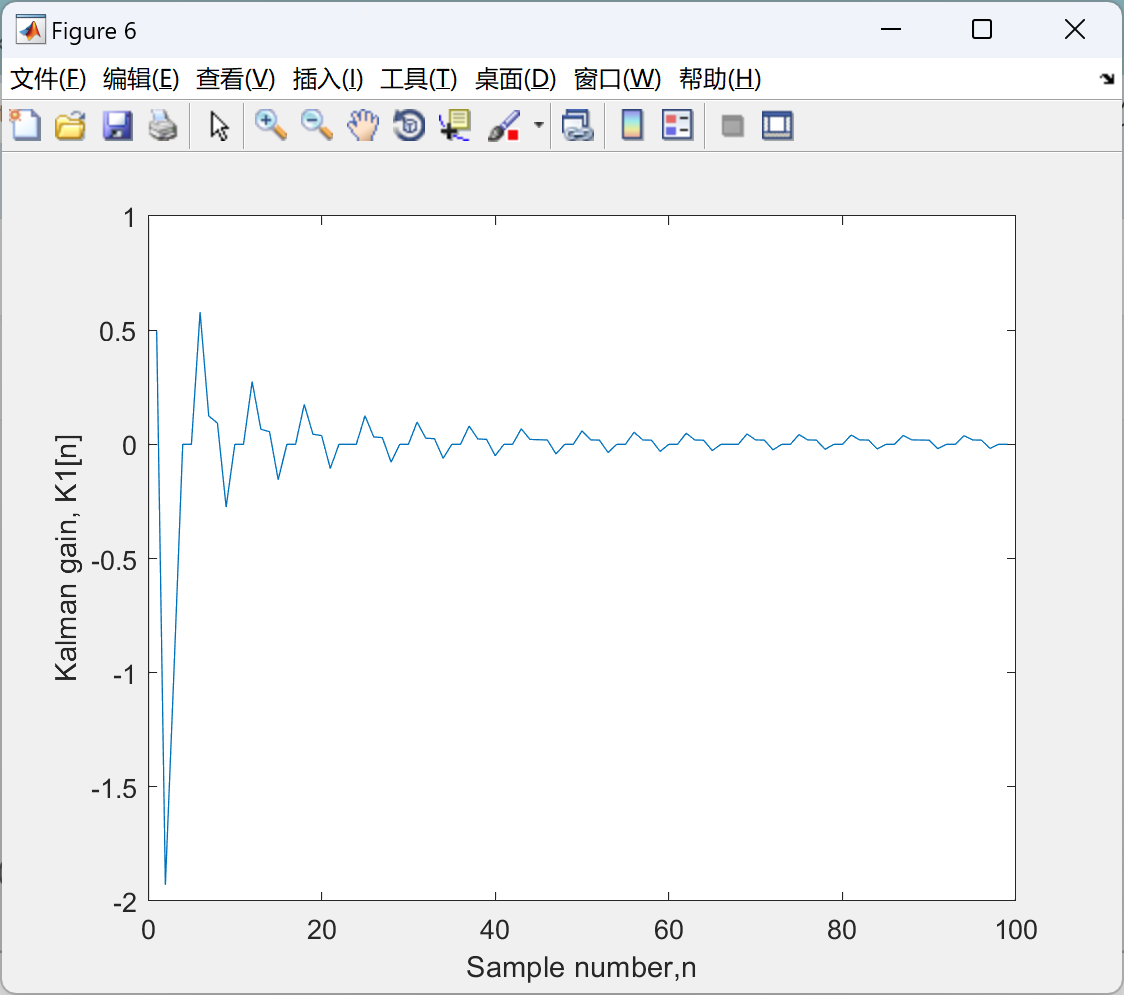
利用卡尔曼滤波实现了时变信道估计问题。 在研究的第一部分,给出了引言和一些定义。 在第二部分中,分析了该问题,并提供了一些有用的理论和实践信息。 在研究的第三部分,解释了卡尔曼滤波的方法,并给出了仿真算法。 在研究的最后一部分,给出了模拟结果,并对这些结果进行了解释和评论。
📚2 运行结果
主函数部分代码:
clear all;close all;
%initial conditions
h_(:,1)=[0;0];%initial weights
M_=100*eye(2);%Mmse initial
R=0.1;%observation noise varience
A=[0.99 0;0 0.999];%State matrix constant with time
Q=0.0001*eye(2);%process noise covariance
n=1:1:100;%sampling time
v= 0.5*(1 + square(n));%input to the channel
p=2;%number of weights modelled by the channel
x=zeros(1,100);
y=zeros(1,100);
K=zeros(2,100);
h1=zeros(1,100);
h2=zeros(1,100);
h_1=zeros(1,100);
h_2=zeros(1,100);
K1=zeros(1,99);
K2=zeros(1,99);
%modelling channel coeffiecients to generate channel coeffiecients with
%time
for i=1:100
h1(i)=-0.006*i+1+randn*(0.0001);
h2(i)=0.9+randn*(0.0001);
end
h=[h1;h2];
M1=zeros(1,100);
M2=zeros(1,100);
for i= 2:100
h_(:,i)=A*h_(:,i-1);%process state equation
y(i)=[v(i) v(i-2+1)]*h(:,i);%actual output
x(i)=[v(i) v(i-2+1)]*h(:,i)+ R*randn;%measuremnet equation
%prediction
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张奇,韩庆邦,孙刘家等.混凝土缺陷信号变分模态分解与超声成像方法[J/OL].应用声学:1-9[2024-03-27].http://kns.cnki.net/kcms/detail/11.2121.O4.20240327.1201.002.html.
[2]王宇,肖遥,赵陈磊等.针对冲击性故障信号的谱融合特征提取算法[J/OL].机械设计与制造:1-5[2024-03-27].https://doi.org/10.19356/j.cnki.1001-3997.20240315.003.

















 981
981

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









