



 本文介绍了Rapidly-exploringRandomTrees(RRT)算法在处理有障碍物的高维空间中的路径规划,包括工作原理、随机采样与连接策略,以及使用Matlab实现的示例代码。通过实例展示了如何在复杂的环境中寻找可行路径。
本文介绍了Rapidly-exploringRandomTrees(RRT)算法在处理有障碍物的高维空间中的路径规划,包括工作原理、随机采样与连接策略,以及使用Matlab实现的示例代码。通过实例展示了如何在复杂的环境中寻找可行路径。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
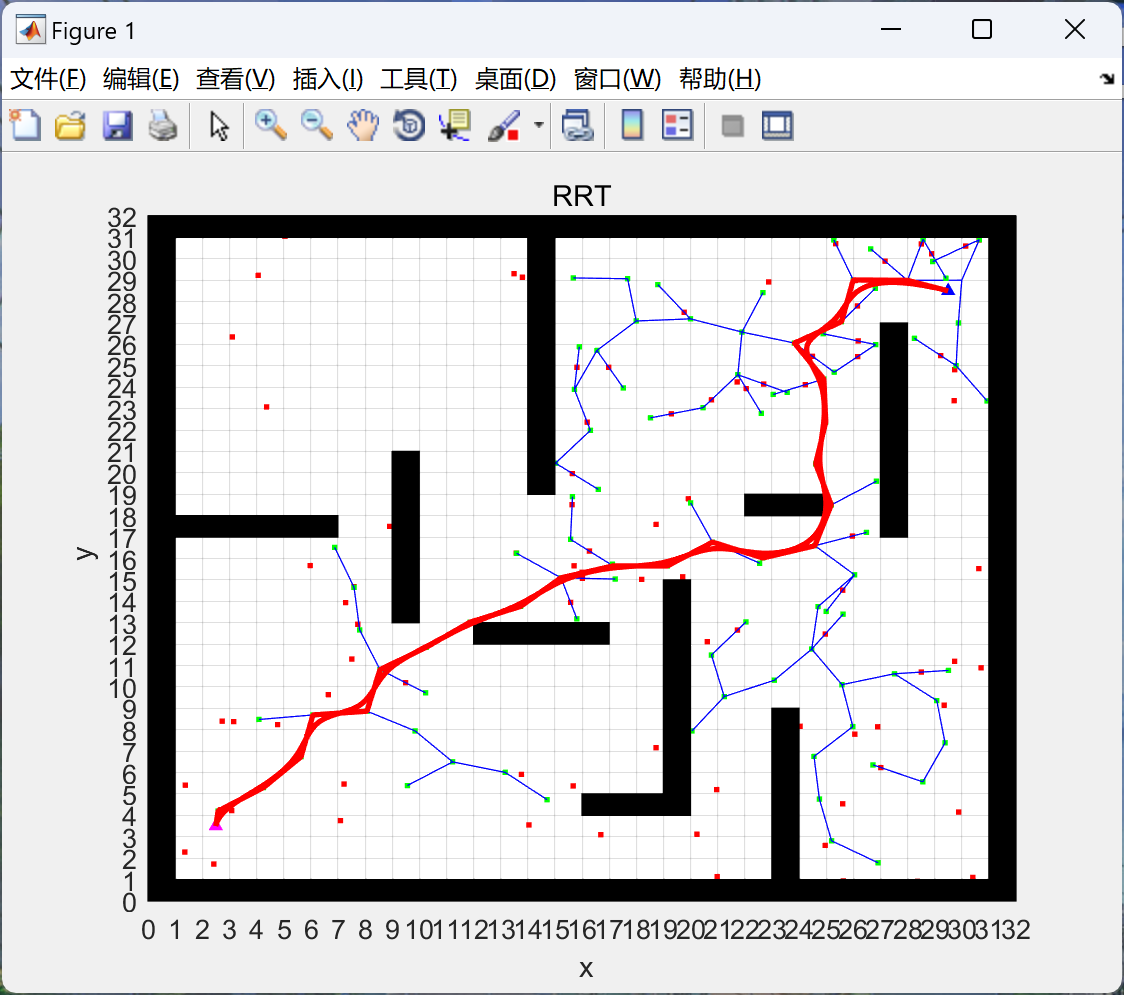
用于路径规划的快速探索随机树(RRT)算法的工作原理是构建一个探索机器人配置空间的树,根节点代表初始配置,并通过随机采样和与现有树的连接迭代添加新节点。该算法使用距离度量来标识树中离每个新采样点最近的节点,如果它们之间的连接不与障碍物相交,则向树中添加新节点和边。随着树的生长,它会探索配置空间的更多区域并接近目标配置。当达到目标或达到定义的迭代次数限制时,算法将终止。RRT 可以处理有障碍物的高维和复杂空间,但由于采样过程的随机性,可能并不总是找到最佳路径。
📚2 运行结果
部分代码:
% [1] LaValle S M. Rapidly-exploring random trees: A new tool for path planning[J]. 1998.
% If you use the code, please make sure that you cite references [1].
% Lixing Liu and Xin Yang
% Emails: 1135337497@qq.com
clc
clear
close all
extend_area = 0.2;
resolution = 1;
robot_radius = 0.5;
ob2 = [1,18,6,0];
ob3 = [10,14,0,7];
ob4 = [13,13,4,0];
ob5 = [15,20,0,11];
ob6 = [17,5,3,0];
ob7 = [20,5,0,10];
ob8 = [24,1,0,8];
ob9 = [23,19,2,0];
ob10 = [28,18,0,9];
ob_limit_1 = [1,1,0,31];
ob_limit_2 = [1,1,31,0];
ob_limit_3 = [32,1,0,31];
ob_limit_4 = [1,32,31,0];
ob = [ob2;ob3;ob4;ob5;ob6;ob7;ob8;ob9;ob10;...
ob_limit_1;ob_limit_2;ob_limit_3;ob_limit_4];
x_left_limit = 0;
x_right_limit = 32;
y_left_limit = 0;
y_right_limit = 32;
extend_area = 0.2;
resolution = 1;
robot_radius = 0.2;
x_start = [30, 29];
goal = [3, 4];
grow_distance = 2;
goal_radius = 1.5;
tree.child = [];
tree.parent = [];
tree.child = x_start;
flag = 1;
new_node_x = x_start(1,1);
new_node_y = x_start(1,2);
new_node = [new_node_x, new_node_y];
tic
while true
rd_x = 32 * rand();
rd_y = 32 * rand();
if (rd_x >= x_right_limit || rd_x <= x_left_limit ||...
rd_y >= y_right_limit || rd_y <= y_left_limit)
flag = 0;
end
[angle, min_idx] = cal_distance(rd_x, rd_y, tree);
new_node_x = tree.child(min_idx,1)+grow_distance*cos(angle);
new_node_y = tree.child(min_idx,2)+grow_distance*sin(angle);
new_node = [new_node_x, new_node_y];
for k=1:1:size(ob,1)
for i=min(tree.child(min_idx,1),new_node_x):0.01:max(tree.child(min_idx,1),new_node_x)
j = (tree.child(min_idx,2) - new_node_y)/(tree.child(min_idx,1) - new_node_x) *(i - new_node_x) + new_node_y;
if(i >=ob(k,1)-resolution && i <= ob(k,1)+ob(k,3) && j >= ob(k,2)-resolution && j <= ob(k,2)+ob(k,4))
flag = 0;
break
end
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]游丽,吴宏,赵光辉.路衍经济发展态势评估及路径优化[J].重庆交通大学学报(社会科学版),2024,24(01):46-56.
[2]罗明亮,袁鹏程.考虑客户满意度的车辆路径优化及其算法研究[J/OL].河南师范大学学报(自然科学版),2024(02):51-61[2024-01-29].https://doi.org/10.16366/j.cnki.1000-2367.2022.10.01.0002.


















 4151
4151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









