




在计算机科学的广阔领域中,八叉树(Octree)以其独特的三维空间分割能力而著称。
这种数据结构通过递归地细分空间,将三维空间划分成更细小的区域,从而高效地组织和存储空间数据。八叉树因其在处理三维图形和执行空间查询时的卓越性能而备受青睐。
本文将深入探讨八叉树的基本概念、构建方法、多样化的应用场景以及提升其性能的优化策略。
基本概念
Octree八叉树是一种树状数据结构,它将三维空间划分为立方体形状的区域。每个节点代表一个立方体,并且可以进一步细分为八个更小的立方体,每个小立方体对应一个子节点。
这种递归的分割过程持续进行,直至满足特定的条件,如节点内的对象数量、空间的最小尺寸或预设的精度要求。
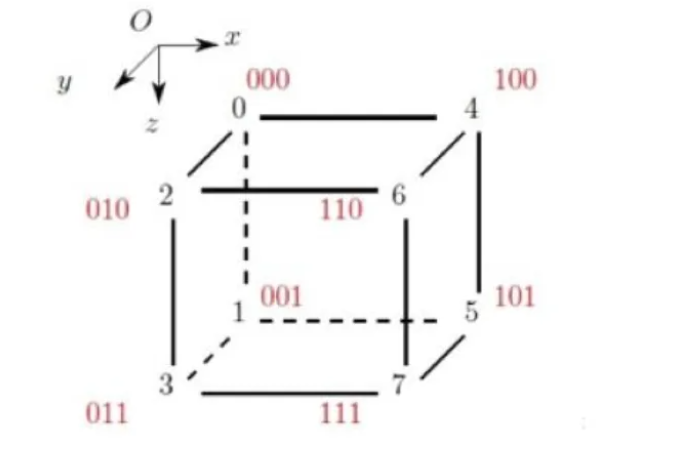
节点:每个节点代表一个立方体区域,包含一个中心点和一定的边长。子节点:每个节点有八个子节点,分别对应立方体的八个象限。叶节点:没有子节点的节点称为叶节点,通常用于存储空间中的对象或数据

八叉树结构图
如何构建
- 初始化根节点选择一个立方体作为根节点,这个立方体通常覆盖了整个三维空间或者感兴趣的区域。定义根节点的边界,通常由六个参数定义:最小x、y、z坐标(xmin, ymin, zmin)和最大x、y、z坐标(xmax, ymax, zmax)。
根节点示意图
- 递归细分从根节点开始,检查是否需要进一步细分。这通常基于几个条件:
-
- 对象数量:如果节点内的对象数量超过某个阈值,那么这个节点需要被细分。
- 空间尺寸:如果节点的大小(边长)大于预设的最小尺寸,那么这个节点需要被细分。
- 最大深度:设置一个最大深度限制,以避免节点过度细分。
-
如果节点需要被细分,那么它将被划分为八个更小的立方体(子节点),每个子节点代表原始立方体的八分之一空间。每个节点被分割为八个子节点时,根据以下规则确定子节点的边界:
-
-
- 子节点的边界由父节点的中心点确定,中心点将父节点的每个维度分为两半。
- 子节点的索引由三个二进制位确定,分别对应x、y、z三个维度的分割(0表示较低一半,1表示较高一半)。
-

细分示意图
- 分配对象
在构建过程中,空间中的对象需要被分配到相应的节点中。对象可以根据其在空间中的位置被插入到适当的节点,或者在节点被细分后,从父节点分配到子节点。 - 终止条件当一个节点不再满足细分条件时,递归过程停止,该节点成为叶节点。叶节点可以存储空间中的对象或者为空。
优缺点
优点:
- 高效的空间查询:八叉树可以快速定位到空间中的特定区域,提高空间查询的效率。
- 集合运算方便:八叉树可以方便地实现集合运算,如求两个物体的并、交、差等运算,这些是其他表示方法难以处理或需要耗费较多计算资源的地方。
- 有序性和分层性:八叉树的有序性和分层性对显示精度和速度的平衡、隐线和隐面的消除等带来了很大的方便,特别有用。
- 空间索引:八叉树作为空间索引结构,在三维数据处理中被广泛应用,实现基于邻域关系的快速查找。
缺点:
- 内存占用:八叉树可能会占用大量的内存空间,特别是对于大型场景或包含大量三维对象的场景。
- 构建和维护成本:构建和维护八叉树需要一定的计算资源,尤其是在处理大规模数据时。
- 深度和粒度的平衡:在大数据量下,最小粒度(叶节点)的确定比较困难,粒度较大时,有的节点数据量可能仍比较大,后续查询效率仍比较低;反之,粒度较小,八叉树的深度增加,需要的内存空间也比较大。
- 更新成本:如果场景中的三维对象频繁地移动或变化,八叉树需要频繁更新,这可能导致性能问题。
优化策略
- 节点与剪枝合并
在动态更新场景时,合并相邻的空节点以减少八叉树的深度和节点数量,减少遍历和碰撞检测的计算量。进行剪枝操作,移除不包含任何三维对象的节点,减少不必要的计算。
- 最大深度和最小尺寸的调整
根据场景的特点和需求,调整八叉树的最大深度和最小尺寸,以平衡计算量和空间分区的精细度。
- 空间区分优化
使用优化算法,如贪心算法或最佳分割算法,确保子区域的均衡性和紧凑性,提高场景管理的效率。
- 动态加载和卸载
对于大型场景或动态生成的场景,实现动态加载和卸载的机制,只加载和管理可见的部分场景,减少内存占用和提高性能。
- 多级八叉树
对于复杂的场景,使用多级八叉树进行更细致的空间划分和管理,提高性能和灵活性。
- 并行计算
在进行碰撞检测等计算密集型操作时,使用并行计算的方法,如多线程或GPU加速,提高计算效率和响应速度。
- 动态调整八叉树结构
根据场景的变化,动态调整八叉树的结构,如节点的划分和合并,优化性能和效率。
应用场景
- 场景管理:在三维图形和三维场景开发中,八叉树被用于场景管理,以优化渲染过程和提高效率。通过将场景划分为多个区域,可以快速定位和渲染可见的对象,减少不必要的计算和渲染工作。
- 碰撞检测:在物理模拟和三维场景中,八叉树用于加速碰撞检测。通过空间分割,可以快速排除不可能发生碰撞的区域,从而减少碰撞检测的计算量。
- 空间查询:八叉树可以用于快速查询空间中的点、线、面等对象。这种结构特别适合于需要频繁进行空间查询的应用,如地理信息系统(GIS)和空间数据库。
- 空间数据压缩:八叉树还可以用于空间数据的压缩和存储,通过减少冗余信息来优化存储空间。
对比其他数据结构
1.四叉树
四叉树作为一种二维空间分割的数据结构,以其在平面直角坐标系中的应用而闻名;相对地,八叉树则专门针对三维空间进行分割。虽然八叉树在处理三维数据时展现出更高的效率,但与此同时,它也带来了更高的空间复杂度。

四叉树结构图
2.K-D树
K-D树是用于多维空间分割的数据结构,它在每个维度上交替分割空间。与八叉树相比,K-D树在高维空间中的表现可能更好,但在三维空间中,八叉树通常更为高效。

K-D树结构图
| 数据结构 | 构造所需时间 | 查询速度 | 是否可以动态更新 | 占用空间 |
| 四叉树 | O(n*logn) | 快 | 是 | 大(取决于区域大小和物体数量) |
| 八叉树 | O(n*logn) | 快 | 是 | 大(取决于区域大小和物体数量) |
| K-D树 | O(k*n*logn) | 中 | 否 | 中(取决于物体数量) |
数据结构对比表
八叉树,作为一种高效的三维空间划分技术,在众多领域中发挥着重要作用。尽管它在空间复杂度和构建成本方面面临挑战,但通过精心设计的优化策略,可以显著提升其性能。随着技术的不断进步,八叉树在处理大规模三维数据方面的优势日益凸显,其应用范围也有望进一步扩大。
关注 Mapmost,持续更新 GIS、三维美术、计算机技术干货
Mapmost 是一套以三维地图和时空计算为特色的数字孪生底座平台,包含了空间数据管理工具(Studio)、应用开发工具(SDK)、应用创作工具(Alpha)。平台能力已覆盖城市时空数据的集成、多源数据资源的发布管理,以及数字孪生应用开发工具链,满足企业开发者用户快速搭建数字孪生场景的切实需求,助力实现行业领先。

















 2106
2106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









