



 本文详细解析了Samsung AutoV7平台中使用cameraCoreTest工具导出相机原始图像的完整流程,包括初始化CAMCORELIB、设置场景、设备打开、流设置和图像捕获等关键步骤。
本文详细解析了Samsung AutoV7平台中使用cameraCoreTest工具导出相机原始图像的完整流程,包括初始化CAMCORELIB、设置场景、设备打开、流设置和图像捕获等关键步骤。
本文为Samsung Auto V7平台cameraCoreTest工具代码导出camera raw图的代码流程
1. samsung camera subsystem brief
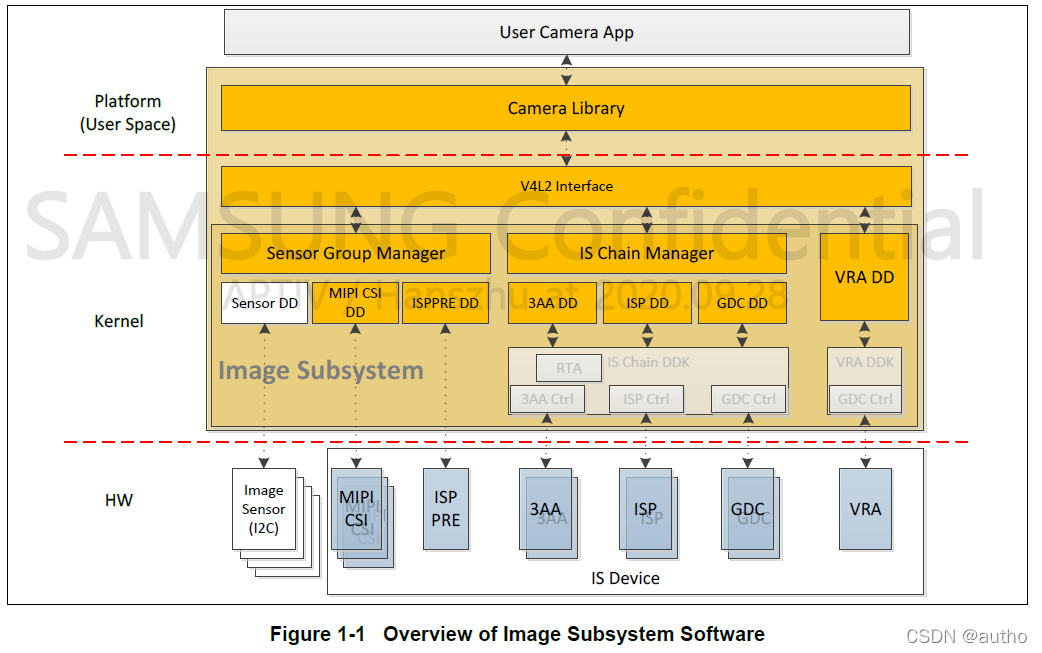
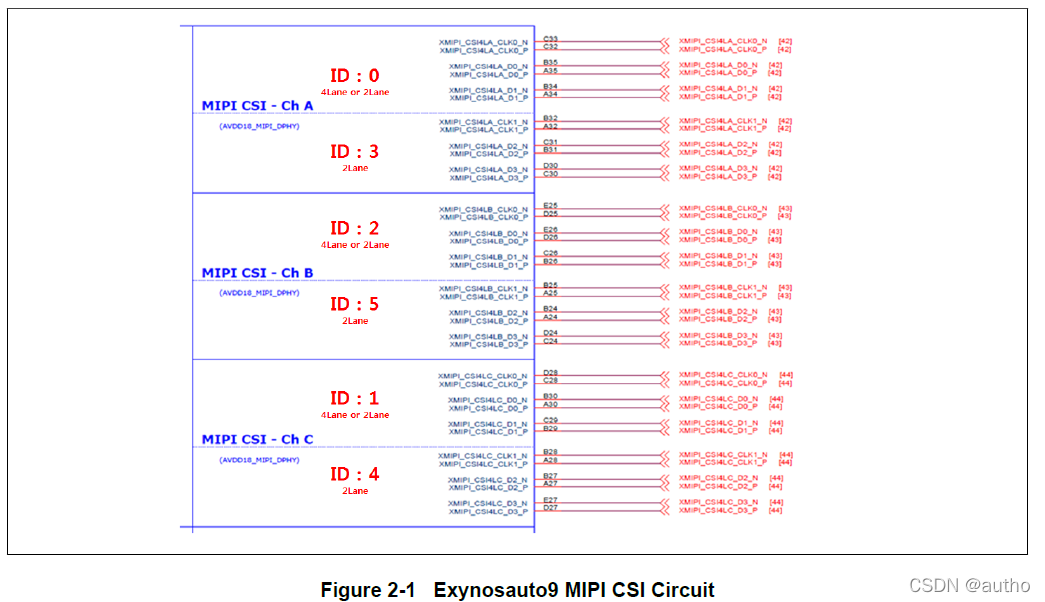
IS Chain manager部分暂时没有使用,SOC包含三路4lane CSI(CSIA,CSIB,CSIC),可通过寄存器配置为六路,如下图,分出来的包括ID3/4/5仅为2lane
2. Camera library Json
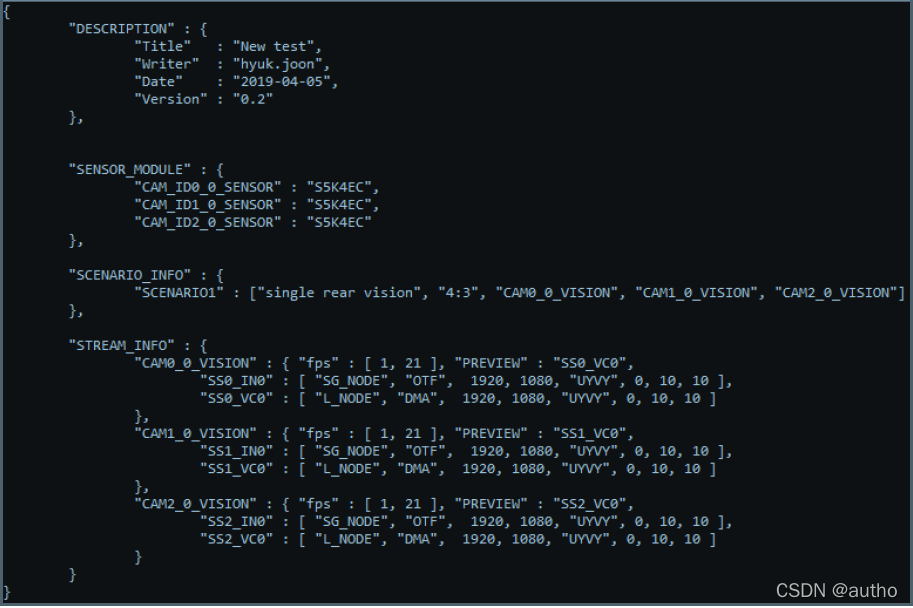
分为scenario, stream部分,会通过cameraCoreTest工具解析出配置数据,具体配置数据参考ExynosAuto9_Miscellaneous_ImageSubsystem_ALL_REV 0.05.pdf,下载链接
3. cameraCoreTest 测试步骤
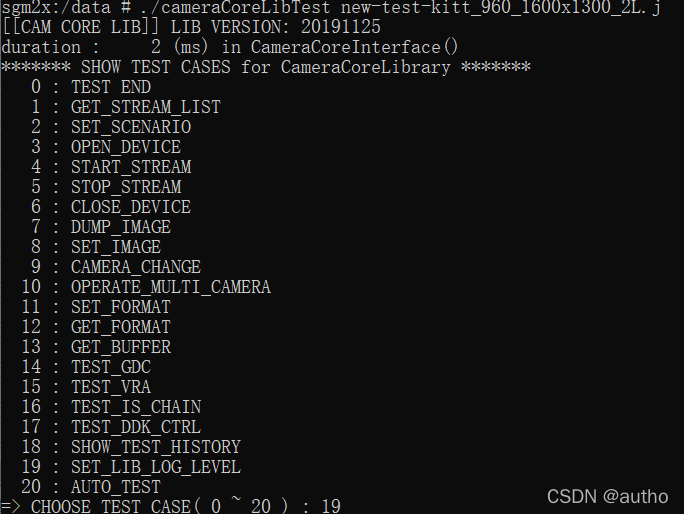
- ./cameraCoreLibTest new-test-kitt_960_1600x1300.j
- Test the vch0
2->1
3->4->0
4->4
7->4
>>>Get the cameralib_1600x1300_UYVY_8bit_20221110_05_11_13.raw file
4. 具体步骤及代码
下面按执行顺序解析代码,跟踪代码流程可打开选项19的log等级
4.1 初始化CAMCORE LIB
执行./cameraCoreLibTest new-test-kitt_960_1600x1300.j时会初始化CameraCoreTestCase类
int main(int argc, char* argv[])
{
(void)argc;
CameraCoreTestCase* camTc = new CameraCoreTestCase(argv[1]);
camTc->choose_test_cases();
delete camTc;
return 0;
}
CameraCoreTestCase类_initialize函数中会new CameraCoreInterface(conf_file_name); 并_register_test_cases();
CameraCoreInterface::_initialize中会初始化CameraCoreScenario、CameraCorePipeline、CameraCoreFile,然后解析Json文件获取scenario,stream相关信息
bool CameraCoreInterface::_initialize()
{
CCL_LOGI("initilaize CameraCoreLib.");
scenarioMgr[_obj_order] = new CameraCoreScenario();
pipelineMgr[_obj_order] = new CameraCorePipeline();
fileMgr[_obj_order] = new CameraCoreFile();
pipelineMgr[_obj_order]->register_scenario_object((IScenarioExternalCallback*)
scenarioMgr[_obj_order]);
pipelineMgr[_obj_order]->register_file_object((ICameraCoreFileCallback*)
fileMgr[_obj_order]);
fileMgr[_obj_order]->register_scenario_object((IScenarioExternalCallback*)
scenarioMgr[_obj_order]);
if(!_set_default_configuration())
{
return false;
}
stream_info = scenarioMgr[_obj_order]->get_stream_list();
for(int i = 0; i < NUM_STREAM; ++i)
{
_libState[i] = CAMCORE_INITIALIZED;
}
CCL_LOGI("CameraCoreLib is initilaized.");
return true;
}
4.2 set scenario

平台仅设置了一个scenario
# "SCENARIO_INFO"
# <stream> : [<brief description>, <feature>, 1st(=rear) stream, 2nd(=front) stream, 3rd, ..., 5th stream, 1st, 2nd, ..., 5th reprocessing(=capture) stream ]
"SCENARIO_INFO" : {
"SCENARIO1" : ["Sensor only", "4:3", "CAM1_0_VISION","CAM1_1_VISION","CAM1_2_VISION","CAM1_3_VISION"]
# Other scenarios ...
},
CAM1_0_VISION中 1表示camera使用的CSI编号,0表示使用的virtual channel
4.3 open device
=> CHOOSE TEST CASE( 0 ~ 20 ) : 3
==== TC_OPEN_DEVICE entered.
duration : 0 (ms) in get_stream_list()
stream id : 1_0(=4), state : CAN_USE
stream id : 1_1(=5), state : CAN_USE
stream id : 1_2(=6), state : CAN_USE
stream id : 1_3(=7), state : CAN_USE
input stream among the above stream :4
input buffer type ( DMA_CALLBACK : 0, DMA_DIRECT_CALL : 1, DMA_KEEP_CALL : 2,
USERPTR_CALLBACK : 4, USERPTR_DIRECT_CALL : 5, USERPTR_KEEP_CALL : 6 )0
(INFO)[[CAM CORE LIB]][open_device][190]open stream : '4'.
(DEBUG)[[CAM CORE LIB]][_set_cap_nodes][724]sid = 1, using[4] = 64, node count = 2
(INFO)[[CAM CORE LIB]][_set_group_dqbuf][842]===== DQBUF THREAD GROUP =====
(INFO)[[CAM CORE LIB]][_set_group_dqbuf][860]Thread 0 : SS1_IN0 ( leader : SS1_IN0 ) SS1_VC0 ( leader : SS1_IN0 )
(INFO)[[CAM CORE LIB]][_set_group_dqbuf][862]==============================
(INFO)[[CAM CORE LIB]][_set_group_dqbuf][923]= DQBUF NODE SEARCH FOR QBUF =
(INFO)[[CAM CORE LIB]][_set_group_dqbuf][941]Thread 0 : SS1_IN0 -> SS1_IN0 SS1_VC0 -> SS1_VC0
(INFO)[[CAM CORE LIB]][_set_group_dqbuf][943]==============================
(INFO)[[CAM CORE LIB]][_set_group_qbuf][978]===== QBUF THREAD GROUP ======
(INFO)[[CAM CORE LIB]][_set_group_qbuf][994]Thread 0 : SS1_IN0 SS1_VC0
(INFO)[[CAM CORE LIB]][_set_group_qbuf][996]==============================
(INFO)[[CAM CORE LIB]][_set_bufs][1032]SET BUFFERS : CAM1_0_VISION
====> calc_planes_and_buffer_size 59565955,0
(DEBUG)[[CAM CORE LIB]][_set_bufs][1050]SS1_IN0 node : 1600x1300, alloc_buffers = 4, planes = 2
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0x5, addr 0x7acbf5c000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0x6, addr 0x7acbf52000, length 40960
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0x7, addr 0x7acbb5a000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0x8, addr 0x7acbb50000, length 40960
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0x9, addr 0x7acb758000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0xa, addr 0x7acb74e000, length 40960
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0xb, addr 0x7acb356000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0xc, addr 0x7acb34c000, length 40960
====> calc_planes_and_buffer_size 59565955,0
(DEBUG)[[CAM CORE LIB]][_set_bufs][1050]SS1_VC0 node : 1600x1300, alloc_buffers = 4, planes = 2
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0xd, addr 0x7acaf54000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0xe, addr 0x7acaf4a000, length 40960
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0xf, addr 0x7acab52000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0x10, addr 0x7acab48000, length 40960
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0x11, addr 0x7aca750000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0x12, addr 0x7aca746000, length 40960
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 0, dmafd 0x13, addr 0x7aca34e000, length 4160000
====> ion_alloc_modern
ID 0, TYPE 0, NAME ion_system_heap(DEBUG)[[CAM CORE LIB]][_alloc_buffers][191]alloc buffer: plane 1, dmafd 0x14, addr 0x7aca344000, length 40960
(INFO)[[CAM CORE LIB]][_set_default_metadata][1166]==============================
(INFO)[[CAM CORE LIB]][_set_default_metadata][1167]METADATA BUFFER COPY
(INFO)[[CAM CORE LIB]][_set_default_metadata][1168]MAGICNUMBER : 0x23456789
(INFO)[[CAM CORE LIB]][_set_default_metadata][1196]Thread 0 : SS1_IN0->0x23456789 SS1_VC0->0x23456789
(INFO)[[CAM CORE LIB]][_set_default_metadata][1198]==============================
(INFO)[[CAM CORE LIB]][_set_default_metadata][1211]==============================
(INFO)[[CAM CORE LIB]][_set_default_metadata][1212]METADATA GROUP NODE SETTING
(INFO)[[CAM CORE LIB]][show_metadata_for_group][360]Leader 105: input 0 0 1600 1300 / out 0 0 1600 1300
(INFO)[[CAM CORE LIB]][show_metadata_for_group][379]Capture[0] 129 : input 0 0 1600 1300 / output 0 0 1600 1300
(INFO)[[CAM CORE LIB]][_set_default_metadata][1223]==============================
(INFO)[[CAM CORE LIB]][open_device][197]stream ( '4' ) is opened.
duration : 301 (ms) in open_device()
==== TC_OPEN_DEVICE :: PASS ...
可以看到有4路Steam可以使用,我们这里选择的是channel 0的steam,选择DMA,接下来是open device
CameraCoreInterface::open_device
—> pipelineMgr[_obj_order]->prepare_pipeline
--------->CameraCorePipeline::_set_bufs
--------------->bufferMgr->calc_planes_and_buffer_size通过Json中的width、height、bitwidth、plane计算出size
—>bufferMgr->alloc_node_buffer根据size和plane分配buffer
------->_alloc_buffers(buffer, prevBuffer, size, buf_type, NULL);
------------>buffer->dmafd[i] = exynos_ion_alloc(_ion_fd, buffer->length[i],
EXYNOS_ION_HEAP_SYSTEM_MASK, 0);通过系统调用利用ION分配buffer,ION已在初始化时打开ion设备bufferMgr->open_ion();
底层ION代码可以参考Android之ION内存管理分析,包含ION设备的注册,__ion_alloc内存分配函数,最后使用alloc_pages分配内存并创建scatterlist。
分配完buffer后会利用dma_buf机制dma_buf_export,dma_buf可以参考Linux内核笔记之DMA_BUF,ion_alloc最后会返回文件描述符fd
底层返回fd之后,会利用mmap函数内存映射,mmap会调用dma_buf的dma_buf_ops中的.mmap,最终调用到buffer->heap->ops->map_user
4.4 start stream
=> CHOOSE TEST CASE( 0 ~ 20 ) : 4
==== TC_START_STREAM entered.
duration : 0 (ms) in get_stream_list()
stream id : 1_0(=4), state : OPENED
stream id : 1_1(=5), state : CAN_USE
stream id : 1_2(=6), state : CAN_USE
stream id : 1_3(=7), state : CAN_USE
input stream among the above stream :4
(INFO)[[CAM CORE LIB]][start_stream][518]start stream : '4'.
====CameraCorePipeline::start_pipeline create qbuf/dqbuf threads!====>CameraCorePipeline::_create_threads
====>CameraCoreThread::create_thread
(DEBUG)[[CAM CORE LIB]][create_thread][98]QBUF_THREAD : thread ( id = 0XC9B42090) is created.
====>CameraCoreThread::create_thread
(DEBUG)[[CAM CORE LIB]][create_thread][98]DQBUF_THREAD : thread ( id = 0XCA343090) is created.
(INFO)[[CAM CORE LIB]][_create_threads][1613]a====>CameraCoreThread _thread_thisll the threads are created.
=====CAM THREAD - dqbuf [name = DQBUF_THREAD : id = 0XCA343090](VERBOSE)[[CAM CORE LIB]][chmod_device][45]pid = 20985 [device : /dev/video205]
=====CAM THREAD - dqbuf [name = DQBUF_THREAD : id = 0XCA343090](VERBOSE)[[CAM CORE LIB]][chmod_device][45]pid = 0 [device : /dev/video205]
====>CameraCoreThread _thread_this====CAM THREAD - qbuf [name = QBUF_THREAD : id = 0XC9B42090]
(DEBUG)[[CAM CORE LIB]][open_node][124]SS1_IN0 node is opened.
(DEBUG)[[CAM CORE LIB]][set_config_leader][344]SS1_IN0 group input type = OTF
(DEBUG)[[CAM CORE LIB]][set_config_leader][345]SS1_IN0 group leader vindex = 105
(DEBUG)[[CAM CORE LIB]][set_config_leader][348]SS1_IN0 s_input index = 0x4016911
(VERBOSE)[[CAM CORE LIB]][chmod_device][45]pid = 20986 [device : /dev/video229]
(VERBOSE)[[CAM CORE LIB]][chmod_device][45]pid = 0 [device : /dev/video229]
(DEBUG)[[CAM CORE LIB]][open_node][124]SS1_VC0 node is opened.
(DEBUG)[[CAM CORE LIB]][set_config_leader][348]SS1_VC0 s_input index = 0x0
(DEBUG)[[CAM CORE LIB]][check_has_leader][442]SS1_IN0 node is leader of all of groups
(VERBOSE)[[CAM CORE LIB]][set_ctrl][207]set control VIDIOC_S_CTRL ( id : value = 10097542 : 1 ).
(VERBOSE)[[CAM CORE LIB]][set_input][382]set input VIDIOC_S_INPUT ( index = 67201297 ).
(VERBOSE)[[CAM CORE LIB]][set_param][414]set param VIDIOC_S_PARM ( max_fps = 30 ).
(VERBOSE)[[CAM CORE LIB]][set_format][462]set format VIDIOC_S_FMT ( 1600 X 1300, buftype = 10, type = 1498831189 ).
(VERBOSE)[[CAM CORE LIB]][request_buffers][534]request buffers VIDIOC_REQBUFS ( count = 4 ).
(VERBOSE)[[CAM CORE LIB]][set_input][382]set input VIDIOC_S_INPUT ( index = 0 ).
(VERBOSE)[[CAM CORE LIB]][set_format][462]set format VIDIOC_S_FMT ( 1600 X 1300, buftype = 9, type = 1498831189 ).
(VERBOSE)[[CAM CORE LIB]][request_buffers][534]request buffers VIDIOC_REQBUFS ( count = 4 ).
(VERBOSE)[[CAM CORE LIB]][set_ctrl][207]set control VIDIOC_S_CTRL ( id : value = 10096691 : 0 ).
(INFO)[[CAM CORE LIB]][_set_DDI][1400]V4L2_CID_IS_SET_SETFILE done
(VERBOSE)[[CAM CORE LIB]][stream_on][693]set VIDIOC_STREAMON.
(INFO)[[CAM CORE LIB]][_set_stream_on][1433]Node SS1_VC0: ON
(VERBOSE)[[CAM CORE LIB]][stream_on][693]set VIDIOC_STREAMON.
(INFO)[[CAM CORE LIB]][_set_stream_on][1433]Node SS1_IN0: ON
(INFO)[[CAM CORE LIB]][start_pipeline][204]setting stream on done
(DEBUG)[[CAM CORE LIB]][prepare_buffer_for_group][2365]prime node = SS1_IN0
(DEBUG)[[CAM CORE LIB]][prepare_buffer_for_group][2380]junction node = SS1_VC0
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_VC0 : index : 0
(DEBUG)[[CAM CORE LIB]][prepare_buffer_for_group][2397]SS1_VC0 junction node prepare qbuf
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_IN0 : index : 0
(INFO)[[CAM CORE LIB]][prepare_buffer_for_group][2408]SS1_IN0 node prepare qbuf
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_VC0 : index : 1
(DEBUG)[[CAM CORE LIB]][prepare_buffer_for_group][2397]SS1_VC0 junction node prepare qbuf
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_IN0 : index : 1
(INFO)[[CAM CORE LIB]][prepare_buffer_for_group][2408]SS1_IN0 node prepare qbuf
(INFO)[[CAM CORE LIB]][start_pipeline][209]preparing buffer for group done
(VERBOSE)[[CAM CORE LIB]][set_ctrl][207]set control VIDIOC_S_CTRL ( id : value = 10096654 : 1 ).
(INFO)[[CAM CORE LIB]][_run_threads][1653]all the created threads are started.
(INFO)[[CAM CORE LIB]][_start_stream][1502]Sensor ID 4 : started and threads are also.
(INFO)[[CAM CORE LIB]][start_pipeline][218]starting stream is done
====starting stream is done
(INFO)[[CAM CORE LIB]][start_stream][533]stream ( '4' ) is started.
duration : 2565 (ms) in start_stream()
==== TC_START_STREAM :: PASS ...
******* SHOW TEST CASES for CameraCoreLibrary *******
0 : TEST END
1 : GET_STREAM_LIST
2 : SET_SCENARIO
3 : OPEN_DEVICE
4 : START_STREAM
5 : STOP_STREAM
6 : CLOSE_DEVICE
7 : DUMP_IMAGE
8 : SET_IMAGE
9 : CAMERA_CHANGE
10 : OPERATE_MULTI_CAMERA
11 : SET_FORMAT
12 : GET_FORMAT
13 : GET_BUFFER
14 : TEST_GDC
15 : TEST_VRA
16 : TEST_IS_CHAIN
17 : TEST_DDK_CTRL
18 : SHOW_TEST_HISTORY
19 : SET_LIB_LOG_LEVEL
20 : AUTO_TEST
=> CHOOSE TEST CASE( 0 ~ 20 ) : ====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_VC0 : index : 2
====> CameraCoreBufferManager::dequeue_buffer
====>CameraCoreDDI::dequeue_buffer
====> do VIDIOC_DQBUF
====> out VIDIOC_DQBUF
====> CameraCoreDDI::dequeue_buffer done
====> SS1_VC0 : index : 0====> check_if_sensor_out 1
====> get image data
==== enter cameraCoreFile to dump image!
====> CameraCoreTestCase::notify_done
(VERBOSE)[[CAM CORE LIB]][_thread_buf][95]done dqbuf SS1_VC0 - 0
====> CameraCoreBufferManager::dequeue_buffer
done qbuf SS1_VC0 - 2
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_IN0 : index : 2
(VERBOSE)[[CAM CORE LIB]][update_metadata_for_group][317][SS1_IN0] 1(SS1_VC0)
done qbuf SS1_IN0 - 2
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_VC0 : index : 3
====>CameraCoreDDI::dequeue_buffer
====> do VIDIOC_DQBUF
====> out VIDIOC_DQBUF
====> CameraCoreDDI::dequeue_buffer done
====> SS1_IN0 : index : 0====> check_if_sensor_out 0
(VERBOSE)[[CAM CORE LIB]][_thread_buf][95]done dqbuf SS1_IN0 - 0
====> CameraCoreBufferManager::dequeue_buffer
====>CameraCoreDDI::dequeue_buffer
====> do VIDIOC_DQBUF
====> out VIDIOC_DQBUF
====> CameraCoreDDI::dequeue_buffer done
====> SS1_VC0 : index : 1====> check_if_sensor_out 1
====> get image data
==== enter cameraCoreFile to dump image!
====> CameraCoreTestCase::notify_done
(VERBOSE)[[CAM CORE LIB]][_thread_buf][95]done dqbuf SS1_VC0 - 1
====> CameraCoreBufferManager::dequeue_buffer
done qbuf SS1_VC0 - 3
====> CameraCoreBufferManager::queue_buffer
(VERBOSE)[[CAM CORE LIB]][queue_buffer][1460]node SS1_IN0 : index : 3
(VERBOSE)[[CAM CORE LIB]][update_metadata_for_group][317][SS1_IN0] 1(SS1_VC0)
====>CameraCoreDDI::dequeue_buffer
====> do VIDIOC_DQBUF
====> out VIDIOC_DQBUF
====> CameraCoreDDI::dequeue_buffer done
CameraCoreInterface::start_stream
调用流程
pipelineMgr[_obj_order]->start_pipeline(tgtStid)
_create_threads(tgtStid);先创建qbuffer/dqbuffer线程
qbuf_thread[tgtStid][i]->create_thread开始时会初始化stop_thread和enable_thread
CameraCoreThread::create_thread
CameraCoreThread::_thread_this
_thread_buf 由于enable_thread为FALSE。线程进入死循环在,直到run_thread函数将enable_thread置为TRUE,才会开始qbuffer
回到start_pipeline,接着执行
_set_DDI
CameraCoreDDI::open_node(curNode)
fd = ::open(dev_name, O_RDONLY & O_CREAT, 0);打开/dev/videoxxx,这里打开依次的是JSON中定义的node SS1_IN0和SS1_VC0
CameraCoreDDI::set_ctrl;IOCTRL调用,v4l2 hal version setting
CameraCoreDDI::set_input
CameraCoreDDI::set_param
CameraCoreDDI::set_format
CameraCoreDDI::request_buffers
_set_stream_on
bufferMgr->prepare_buffer_for_group
_start_stream
接下来用单独的小节来分析上面的IOCTRL流程
4.4.1 open
具体是调用到sam-is-video-ssin0.c中的sam_is_ssxin0_video_fops中的sam_is_ssxin0_video_open
static int sam_is_ssxin0_video_open(struct file *file)
{
int ret = 0;
int ret_err = 0;
struct sam_is_video *video;
struct sam_is_video_ctx *vctx;
struct sam_is_device_sensor *sensor;
struct sam_is_device_sub_sensor *sub_sensor;
struct sam_is_resourcemgr *resourcemgr;
struct sam_is_core *core;
char name[SAM_IS_NAME_LEN];
u32 position;
u32 resource_type;
vctx = NULL;
video = video_drvdata(file);
sub_sensor = container_of(video, struct sam_is_device_sub_sensor, video);
sensor = sub_sensor->sensor;
resourcemgr = video->resourcemgr;
if (!resourcemgr) {
err("resourcemgr is NULL");
ret = -EINVAL;
goto err_resource_null;
}
core = (struct sam_is_core *)sensor->private_data;
if (core && core->reboot) {
smwarn("[SS%d:V]%s: fail to open ssxin0_video_open() - reboot(%d)\n",
sensor->sub_sensor[ENTRY_SSIN0], GET_SSX_ID(video), __func__, core->reboot);
ret = -EINVAL;
goto err_reboot;
}
if (!core) {
warn("%s: core(NULL)", __func__);
ret = -EINVAL;
goto err_resource_null;
}
position = ((video->id - SAM_IS_VIDEO_SS0_IN0_NUM) >> 2);
switch (position) {
case 0:
resource_type = RESOURCE_TYPE_SENSOR0;
break;
case 1:
resource_type = RESOURCE_TYPE_SENSOR1;
break;
case 2:
resource_type = RESOURCE_TYPE_SENSOR2;
break;
case 3:
resource_type = RESOURCE_TYPE_SENSOR3;
break;
case 4:
resource_type = RESOURCE_TYPE_SENSOR4;
break;
case 5:
resource_type = RESOURCE_TYPE_SENSOR5;
break;
default:
err("video id was invalid %d", video->id);
ret = -EINVAL;
goto err_video_id;
}
//这个函数没做什么事,仅仅判断result = &core->sensor[RESOURCE_TYPE_SENSOR0];是否为空
ret = sam_is_resource_open(resourcemgr, resource_type, NULL);
if (ret) {
err("sam_is_resource_open is fail(%d)", ret);
goto err_resource_open;
}
sensor->sub_sensor[ENTRY_SSIN0].instance = atomic_read(&core->instance);
sminfo("[SS%d:V] %s\n", sensor->sub_sensor[ENTRY_SSIN0],
sensor->sub_sensor[ENTRY_SSIN0].sub_sensor_id, __func__);
snprintf(name, sizeof(name), "SS%d",
sensor->sub_sensor[ENTRY_SSIN0].sub_sensor_id);
//为vctx分配空间,初始化,vctx结构体包含了video,subdev,queue以及video buffer的操作函数
ret = open_vctx(file, video, &vctx, sensor->sub_sensor[ENTRY_SSIN0].instance,
FRAMEMGR_ID_SS0, name);
if (ret) {
smerr("open_vctx is fail(%d)", sub_sensor[ENTRY_SSIN0], ret);
goto err_vctx_open;
}
vctx->sub_sensor_id = sensor->sub_sensor[ENTRY_SSIN0].sub_sensor_id;
/* sam_is_video_open是vctx的一些初始化,queue的初始化
vctx->device = device;
vctx->next_device = NULL;
vctx->subdev = NULL;
vctx->video = video;
vctx->vb2_ops = vb2_ops;
vctx->vb2_mem_ops = video->vb2_mem_ops;
vctx->sam_is_vb2_buf_ops = video->sam_is_vb2_buf_ops;
vctx->vops.qbuf = sam_is_video_qbuf;
vctx->vops.dqbuf = sam_is_video_dqbuf;
vctx->vops.done = sam_is_video_buffer_done;
*/
ret = sam_is_video_open(vctx,
sensor,
VIDEO_SSX_READY_BUFFERS,
video,
&sam_is_ssxin0_qops,
&sam_is_sensor_ops);
if (ret) {
smerr("sam_is_video_open is fail(%d)", sensor->sub_sensor[ENTRY_SSIN0], ret);
goto err_video_open;
}
//看下面具体函数的分析
ret = sam_is_sensor_open(sensor, ENTRY_SSIN0, vctx);
if (ret) {
smerr("sam_is_ssxin0_open is fail(%d)", sensor->sub_sensor[ENTRY_SSIN0], ret);
goto err_ischain_open;
}
atomic_inc(&core->instance);
return 0;
err_ischain_open:
ret_err = sam_is_video_close(vctx);
if (ret_err)
smerr("sam_is_video_close is fail(%d)", sensor->sub_sensor[ENTRY_SSIN0],
ret_err);
err_video_open:
ret_err = close_vctx(file, video, vctx);
if (ret_err < 0)
smerr("close_vctx is fail(%d)", sensor->sub_sensor[ENTRY_SSIN0], ret_err);
err_vctx_open:
err_resource_open:
err_reboot:
err_video_id:
err_resource_null:
return ret;
}
/**
* @cnotice
* @prdcode
* @unit_name{device sensor::core}
* @purpose open sensor device
* @logic open csi, isppre device and frame manager
* @params
* @param{in/out, sensor, struct * ::sam_is_device_sensor, Not null}
* @param{in/out, sub_sensor_id, int, >= 0, <= 3}
* @param{in/out, vctx, struct * ::sam_is_video_ctx, Not null}
* @endparam
* @retval{ret, int, 0, 0, < 0}
*/
int sam_is_sensor_open(struct sam_is_device_sensor *sensor, int sub_sensor_id,
struct sam_is_video_ctx *vctx)
{
int ret = 0;
int ret_err = 0;
struct sam_is_groupmgr *groupmgr;
struct sam_is_group *group;
struct sam_is_core *core;
SAM_BUG(!sensor);
SAM_BUG(!sensor->subdev_csi);
SAM_BUG(!sensor->subdev_isppre);
SAM_BUG(!sensor->private_data);
SAM_BUG(!vctx);
SAM_BUG(!GET_VIDEO(vctx));
core = sensor->private_data;
mutex_lock(&core->sensor_open_close_lock);
if (test_bit(SAM_IS_SENSOR_OPEN, &sensor->sub_sensor[sub_sensor_id].state)) {
smerr("already subsensor open", sensor->sub_sensor[sub_sensor_id]);
ret = -EMFILE;
goto err_open_state;
}
if (atomic_read(&sensor->sub_sensor_open_count) >= 4) {
if (test_bit(SAM_IS_SENSOR_OPEN, &sensor->state)) {
smerr("already open", sensor->sub_sensor[sub_sensor_id]);
ret = -EMFILE;
goto err_open_state;
}
}
/*
* Sensor's mclk can be accessed by other ips(ex. preprocessor)
* There's a problem that mclk_on can be called twice due to clear_bit.
* - clear_bit(SAM_IS_SENSOR_MCLK_ON, &device->state);
* Clear_bit of MCLK_ON should be skiped.
*/
clear_bit(SAM_IS_SENSOR_S_INPUT, &sensor->state);
clear_bit(SAM_IS_SENSOR_S_CONFIG, &sensor->state);
clear_bit(SAM_IS_SENSOR_DRIVING, &sensor->state);
clear_bit(SAM_IS_SENSOR_STAND_ALONE, &sensor->state);
clear_bit(SAM_IS_SENSOR_FRONT_START, &sensor->state);
clear_bit(SAM_IS_SENSOR_FRONT_DTP_STOP, &sensor->state);
clear_bit(SAM_IS_SENSOR_BACK_START, &sensor->state);
clear_bit(SAM_IS_SENSOR_OTF_OUTPUT, &sensor->state);
clear_bit(SAM_IS_SENSOR_WAIT_STREAMING, &sensor->state);
set_bit(SAM_IS_SENSOR_BACK_NOWAIT_STOP, &sensor->state);
sensor->sub_sensor[sub_sensor_id].vctx = vctx;
sensor->sub_sensor[sub_sensor_id].fcount = 0;
sensor->sub_sensor[sub_sensor_id].csi_fcount = 0;
sensor->instant_cnt = 0;
sensor->instant_ret = 0;
sensor->sub_sensor[sub_sensor_id].ischain = NULL;
sensor->exposure_time = 0;
sensor->frame_duration = 0;
groupmgr = sensor->groupmgr;
group = &sensor->sub_sensor[sub_sensor_id].group_sensor;
if (atomic_read(&sensor->sub_sensor_open_count) == 0) {
ret = sam_is_virtual_ch_cfg((void *)sensor);
//isppre->dma_subdev[CSI_VIRTUAL_CH_0]赋值,具体还不清楚上面作用
if (ret) {
smerr("sam_is_virtual_ch_cfg is fail", sensor->sub_sensor[sub_sensor_id]);
goto err_virtual_ch_cfg;
}
//上面都没做,一些初始化
ret = sam_is_csi_open(sensor->subdev_csi, GET_FRAMEMGR(vctx));
if (ret) {
smerr("sam_is_csi_open is fail(%d)", sensor->sub_sensor[sub_sensor_id], ret);
goto err_csi_open;
}
ret = sam_is_isppre_open(sensor->subdev_isppre, GET_FRAMEMGR(vctx));
if (ret) {
smerr("sam_is_isppre_open is fail(%d)", sensor->sub_sensor[sub_sensor_id], ret);
goto err_csi_open;
}
}
ret = sam_is_devicemgr_open(sensor->devicemgr, sub_sensor_id, (void *)sensor,
SAM_IS_DEVICE_SENSOR);
if (ret) {
err("sam_is_devicemgr_open is fail(%d)", ret);
goto err_devicemgr_open;
}
/* for mediaserver force close */
if (atomic_read(&sensor->sub_sensor_open_count) == 0) {
ret = sam_is_resource_get(sensor->resourcemgr, sensor->position);
if (ret) {
smerr("sam_is_resource_get is fail", sensor->sub_sensor[sub_sensor_id]);
goto err_resource_get;
}
}
set_bit(SAM_IS_SENSOR_OPEN, &sensor->sub_sensor[sub_sensor_id].state);
atomic_inc(&sensor->sub_sensor_open_count);
if (atomic_read(&sensor->sub_sensor_open_count) == 1)
set_bit(SAM_IS_SENSOR_OPEN, &sensor->state);
sminfo("[SEN:D] %s():%d\n", sensor->sub_sensor[sub_sensor_id], __func__, ret);
mutex_unlock(&core->sensor_open_close_lock);
return 0;
err_resource_get:
err_devicemgr_open:
ret_err = sam_is_devicemgr_close(sensor->devicemgr, sub_sensor_id,
(void *)sensor, SAM_IS_DEVICE_SENSOR);
if (ret_err)
smerr("sam_is_devicemgr_close is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret_err);
err_csi_open:
err_virtual_ch_cfg:
err_open_state:
sminfo("[SEN:D] %s():%d\n", sensor->sub_sensor[sub_sensor_id], __func__, ret);
mutex_unlock(&core->sensor_open_close_lock);
return ret;
}
sam_is_ssxvc0_video_open和以上内容差别不大
4.4.2 set_input
调用sam_is_ssxin0_video_s_input,具体调用sam_is_sensor_s_input
/**
* @cnotice
* @prdcode
* @unit_name{device sensor::core}
* @purpose set input sensor device
* @logic sensor clock and gpio on, subdev init call
* @params
* @param{in/out, sensor, struct * ::sam_is_device_sensor, Not null}
* @param{in/out, sub_sensor_id, int, >= 0, <= 3}
* @param{in/out, input, u32, 0 ~ (2^32 - 1)}
* @param{in/out, scenario, u32, 0 ~ (2^32 - 1)}
* @param{in/out, video_id, u32, 0 ~ (2^32 - 1)}
* @endparam
* @retval{ret, int, 0, 0, < 0}
*/
int sam_is_sensor_s_input(struct sam_is_device_sensor *sensor,
int sub_sensor_id,
u32 input,
u32 scenario,
u32 video_id)
{
int ret = 0;
struct sam_is_core *core = (struct sam_is_core *)dev_get_drvdata(sam_is_dev);
struct v4l2_subdev *subdev_module;
struct v4l2_subdev *subdev_csi;
struct v4l2_subdev *subdev_isppre;
struct sam_is_module *module;
struct sam_is_device_sensor_peri *sensor_peri;
struct sam_is_group *group;
struct sam_is_groupmgr *groupmgr;
SAM_BUG(!sensor);
SAM_BUG(!sensor->pdata);
SAM_BUG(!sensor->subdev_csi);
SAM_BUG(!sensor->subdev_isppre);
SAM_BUG(input >= SENSOR_NAME_END);
if (test_bit(SAM_IS_SENSOR_S_INPUT, &sensor->state)) {
smerr("already s_input", sensor->sub_sensor[sub_sensor_id]);
ret = -EINVAL;
goto p_err;
}
module = NULL;
module = &sensor->sub_sensor[sub_sensor_id].module;
groupmgr = sensor->groupmgr;
group = &sensor->sub_sensor[sub_sensor_id].group_sensor;
/*初始化group成员
smp_shot_init(group, BASE_SHOT_RESOURCE);
group->asyn_shots = NONE_SHOT_RESOURCE;
group->skip_shots = NONE_SHOT_RESOURCE;
group->init_shots = NONE_SHOT_RESOURCE;
group->sync_shots = BASE_SHOT_RESOURCE;
*/
ret = sam_is_group_init(groupmgr, group, GROUP_INPUT_OTF, video_id, true);
if (ret) {
smerr("sam_is_group_init is fail(%d)", sensor->sub_sensor[sub_sensor_id], ret);
goto p_err;
}
subdev_module = module->subdev;
if (!subdev_module) {
smerr("subdev module is not probed", sensor->sub_sensor[sub_sensor_id]);
ret = -EINVAL;
goto p_err;
}
subdev_csi = sensor->subdev_csi;
subdev_isppre = sensor->subdev_isppre;
sensor->position = module->position;
sensor->image.framerate = min_t(u32, SENSOR_DEFAULT_FRAMERATE,
module->max_framerate);
sensor->image.window.width = module->pixel_width;
sensor->image.window.height = module->pixel_height;
sensor->image.window.o_width = sensor->image.window.width;
sensor->image.window.o_height = sensor->image.window.height;
/* send csi chennel to FW */
module->ext.sensor_con.csi_ch = sensor->pdata->csi_ch;
module->ext.sensor_con.csi_ch |= 0x0100;
sensor_peri = (struct sam_is_device_sensor_peri *)module->private_data;
/* set cis data */
{
u32 i2c_channel = module->ext.sensor_con.peri_setting.i2c.channel;
if (i2c_channel < SENSOR_CONTROL_I2C_MAX) {
sensor_peri->cis.i2c_lock = &core->i2c_lock[i2c_channel];
info("%s[%d]enable cis i2c client. position = %d\n",
__func__, __LINE__, module->position);
} else
smwarn("wrong cis i2c_channel(%d)", sensor->sub_sensor[sub_sensor_id],
i2c_channel);
}
sam_is_sensor_peri_init_work(sensor_peri);
sensor->pdata->scenario = scenario;
if (scenario == SENSOR_SCENARIO_NORMAL)
clear_bit(SAM_IS_SENSOR_STAND_ALONE, &sensor->state);
else
set_bit(SAM_IS_SENSOR_STAND_ALONE, &sensor->state);
if (sensor->sub_sensor[sub_sensor_id].subdev_module) {
smwarn("subdev_module is already registered",
sensor->sub_sensor[sub_sensor_id]);
v4l2_device_unregister_subdev(sensor->sub_sensor[sub_sensor_id].subdev_module);
}
ret = v4l2_device_register_subdev(&sensor->v4l2_dev, subdev_module);
if (ret) {
smerr("v4l2_device_register_subdev is fail(%d)",
sensor->sub_sensor[sub_sensor_id], ret);
goto p_err;
}
sensor->sub_sensor[sub_sensor_id].subdev_module = subdev_module;
// enable mclk
ret = sam_is_sensor_mclk_on(sensor, scenario, module->pdata->mclk_ch);
if (ret) {
smerr("sam_is_sensor_mclk_on is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
/* Sensor power on */
ret = sam_is_sensor_gpio_on(sensor, sub_sensor_id);
if (ret) {
smerr("sam_is_sensor_gpio_on is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
//subdev_csi在sam_is_csi_probe时赋值了ops,此时调用csi_init,设置csi reg进行reset csi
ret = v4l2_subdev_call(subdev_csi, core, init, sub_sensor_id);
if (ret) {
smerr("v4l2_csi_call(init) is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
/*subdev_isppre会在sam_is_isppre_probe时被赋值
Set ISPPRE Common config (global enable, dma init, input, output mux) */
ret = v4l2_subdev_call(subdev_isppre, core, init, sub_sensor_id);
if (ret) {
smerr("v4l2_csi_call(init) is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
//上面的调用都是空的,下面的调用具体掉sam-is-device-module-960-serdes.c中的sensor_module_init,再调用sam-is-cis-960-serdes.c中的sensor_960_serdes_cis_init进行解串器的初始化
ret = v4l2_subdev_call(subdev_module, core, init, 0);
if (ret) {
smerr("v4l2_module_call(init) is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
//group还是没弄清楚有什么用
ret = sam_is_devicemgr_binding(sensor->devicemgr, sub_sensor_id, sensor,
group->ischain, SAM_IS_DEVICE_SENSOR);
if (ret) {
smerr("sam_is_devicemgr_binding is fail", sensor->sub_sensor[sub_sensor_id]);
goto p_err;
}
set_bit(SAM_IS_SENSOR_S_INPUT, &sensor->state);
p_err:
sminfo("[SEN:D] %s(%d, %d):%d\n", sensor->sub_sensor[sub_sensor_id], __func__,
input, scenario, ret);
return ret;
}
4.4.3 set_param
这个函数是设置 帧率的,底层函数上面都没有操作
4.4.4 set_format
根据log,会调用到sam_is_sensor_s_format
/**
* @cnotice
* @prdcode
* @unit_name{device sensor::core}
* @purpose set format sensor device
* @logic find sensor setting and call csi/isppre set format
* @params
* @param{in/out, qdevice, void *, Not null}
* @param{in/out, sub_sensor_id, int, >= 0, <= 3}
* @param{in/out, queue, struct * ::sam_is_queue, Not null}
* @endparam
* @retval{ret, int, 0, 0, < 0}
*/
static int sam_is_sensor_s_format(void *qdevice, int sub_sensor_id,
struct sam_is_queue *queue)
{
int ret = 0;
struct sam_is_device_sensor *sensor = qdevice;
struct v4l2_subdev *subdev_module;
struct v4l2_subdev *subdev_csi;
struct v4l2_subdev *subdev_isppre;
struct v4l2_subdev_format subdev_format;
struct sam_is_fmt *format;
u32 width;
u32 height;
SAM_BUG(!sensor);
SAM_BUG(!sensor->sub_sensor[sub_sensor_id].subdev_module);
SAM_BUG(!sensor->subdev_csi);
SAM_BUG(!queue);
subdev_module = sensor->sub_sensor[sub_sensor_id].subdev_module;
subdev_csi = sensor->subdev_csi;
subdev_isppre = sensor->subdev_isppre;
format = queue->framecfg.format;
width = queue->framecfg.width;
height = queue->framecfg.height;
memcpy(&sensor->image.format, format, sizeof(struct sam_is_fmt));
sensor->image.window.offs_h = 0;
sensor->image.window.offs_v = 0;
sensor->image.window.width = width;
sensor->image.window.o_width = width;
sensor->image.window.height = height;
sensor->image.window.o_height = height;
subdev_format.format.code = format->pixelformat;
subdev_format.format.field = format->field;
subdev_format.format.width = width;
subdev_format.format.height = height;
//根据JSON文件中设置的width和height,找到对应的sensor mode配置,同时查看是否sensor mode change
sensor->cfg = sam_is_sensor_g_mode(sensor, sub_sensor_id);
if (!sensor->cfg) {
smerr("sensor cfg is invalid", sensor->sub_sensor[sub_sensor_id]);
ret = -EINVAL;
goto p_err;
}
set_bit(SAM_IS_SENSOR_S_CONFIG, &sensor->state);
//没什么实质性操作
ret = v4l2_subdev_call(subdev_module, pad, set_fmt, NULL, &subdev_format);
if (ret) {
smerr("v4l2_module_call(s_format) is fail(%d)",
sensor->sub_sensor[sub_sensor_id], ret);
goto p_err;
}
//没什么实质性操作
ret = v4l2_subdev_call(subdev_csi, pad, set_fmt, NULL, &subdev_format);
if (ret) {
smerr("v4l2_csi_call(s_format) is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
//isppre dma, output format set
ret = v4l2_subdev_call(subdev_isppre, pad, set_fmt, NULL, &subdev_format);
if (ret) {
smerr("v4l2_isppre_call(s_format) is fail(%d)",
sensor->sub_sensor[sub_sensor_id], ret);
goto p_err;
}
p_err:
return ret;
}
4.4.5 request_buffers
sam_is_ssxin0_video_reqbufs ====>sam_is_video_reqbufs
/**
* @cnotice
* @prdcode
* @unit_name{coregroup::core}
* @purpose request buffer of video node
* @logic If vctx/request are valid, call vb2_reqbufs and frame_manager_open
* @params
* @param{in, file, struct* ::file, Not null}
* @param{in, vctx, struct* ::sam_is_video_ctx, Not null}
* @param{in, request, struct* ::v4l2_requestbuffers, Not null}
* @endparam
* @retval{ret, int, 0, 0, !0}
*/
int sam_is_video_reqbufs(struct file *file,
struct sam_is_video_ctx *vctx,
struct v4l2_requestbuffers *request)
{
int ret = 0;
struct sam_is_queue *queue;
struct sam_is_framemgr *framemgr;
struct sam_is_video *video;
SAM_BUG(!vctx);
SAM_BUG(!request);
video = GET_VIDEO(vctx);
if (!(vctx->state & (BIT(SAM_IS_VIDEO_S_FORMAT) | BIT(SAM_IS_VIDEO_STOP) | BIT(
SAM_IS_VIDEO_S_BUFS)))) {
mverr("invalid reqbufs is requested(%lX)", vctx, video, vctx->state);
return -EINVAL;
}
queue = GET_QUEUE(vctx);
if (test_bit(SAM_IS_QUEUE_STREAM_ON, &queue->state)) {
mverr("video is stream on, not applied", vctx, video);
ret = -EINVAL;
goto p_err;
}
//根据JSON文件中定义的buffer数,上层传过来的buffer count为4
/* before call queue ops if request count is zero */
if (!request->count) {
ret = CALL_QOPS(queue, request_bufs, GET_DEVICE(vctx), queue, request->count);
if (ret) {
mverr("request_bufs is fail(%d)", vctx, video, ret);
goto p_err;
}
}
//检查memory type以及相关操作函数是否存在,在调用vb2_core_reqbufs,下面我们具体分析
ret = vb2_reqbufs(queue->vbq, request);
if (ret) {
mverr("vb2_reqbufs is fail(%d)", vctx, video, ret);
goto p_err;
}
framemgr = &queue->framemgr;
queue->buf_maxcount = request->count;
if (queue->buf_maxcount == 0) {
queue->buf_refcount = 0;
clear_bit(SAM_IS_QUEUE_BUFFER_READY, &queue->state);
clear_bit(SAM_IS_QUEUE_BUFFER_PREPARED, &queue->state);
frame_manager_close(framemgr);
} else {
if (queue->buf_maxcount < queue->buf_rdycount) {
mverr("buffer count is not invalid(%d < %d)", vctx, video,
queue->buf_maxcount, queue->buf_rdycount);
ret = -EINVAL;
goto p_err;
}
//建立buffer管理,初始化queued_list
ret = frame_manager_open(framemgr, queue->buf_maxcount);
if (ret) {
mverr("sam_is_frame_open is fail(%d)", vctx, video, ret);
goto p_err;
}
}
/* after call queue ops if request count is not zero */
if (request->count) {
ret = CALL_QOPS(queue, request_bufs, GET_DEVICE(vctx), queue, request->count);
if (ret) {
mverr("request_bufs is fail(%d)", vctx, video, ret);
goto p_err;
}
}
vctx->state = BIT(SAM_IS_VIDEO_S_BUFS);
p_err:
return ret;
}
int vb2_reqbufs(struct vb2_queue *q, struct v4l2_requestbuffers *req)
{
//检查memory type及相关类型的操作函数ops是否存在
int ret = vb2_verify_memory_type(q, req->memory, req->type);
return ret ? ret : vb2_core_reqbufs(q, req->memory, &req->count);
}
int vb2_core_reqbufs(struct vb2_queue *q, enum vb2_memory memory,
unsigned int *count)
{
unsigned int num_buffers, allocated_buffers, num_planes = 0;
unsigned plane_sizes[VB2_MAX_PLANES] = { };
int ret;
if (q->streaming) {
dprintk(1, "streaming active\n");
return -EBUSY;
}
if (*count == 0 || q->num_buffers != 0 || q->memory != memory) {
/*
* We already have buffers allocated, so first check if they
* are not in use and can be freed.
*/
mutex_lock(&q->mmap_lock);
if (q->memory == VB2_MEMORY_MMAP && __buffers_in_use(q)) {
mutex_unlock(&q->mmap_lock);
dprintk(1, "memory in use, cannot free\n");
return -EBUSY;
}
/*
* Call queue_cancel to clean up any buffers in the PREPARED or
* QUEUED state which is possible if buffers were prepared or
* queued without ever calling STREAMON.
*/
__vb2_queue_cancel(q);
ret = __vb2_queue_free(q, q->num_buffers);
mutex_unlock(&q->mmap_lock);
if (ret)
return ret;
/*
* In case of REQBUFS(0) return immediately without calling
* driver's queue_setup() callback and allocating resources.
*/
if (*count == 0)
return 0;
}
/*
* Make sure the requested values and current defaults are sane.
*/
num_buffers = min_t(unsigned int, *count, VB2_MAX_FRAME);
num_buffers = max_t(unsigned int, num_buffers, q->min_buffers_needed);
memset(q->alloc_devs, 0, sizeof(q->alloc_devs));
q->memory = memory;
//这里打印出的是DMA buffer
printk("====> vb2_core_reqbufs memory %d\n",memory);
/*
* Ask the driver how many buffers and planes per buffer it requires.
* Driver also sets the size and allocator context for each plane.
*/
//queue是在sam_is_ssxin0_video_open时,在sam_is_video_open中初始化的,具体调用sam_is_ssxin0_queue_setup====>sam_is_queue_setup,没有具体分配buffer,仅做了queue->framecfg相关计算和赋值
ret = call_qop(q, queue_setup, q, &num_buffers, &num_planes,
plane_sizes, q->alloc_devs);
if (ret)
return ret;
/*在__vb2_queue_alloc中分配q->buf_struct_size,这个大小是在queue_init中初始化的vbq->buf_struct_size = sizeof(struct sam_is_vb2_buf);
* for (buffer = 0; buffer < num_buffers; ++buffer) {
* /* Allocate videobuf buffer structures */
* vb = kzalloc(q->buf_struct_size, GFP_KERNEL);
* if (!vb) {
* dprintk(1, "memory alloc for buffer struct failed\n");
* break;
* }
* vb->state = VB2_BUF_STATE_DEQUEUED;
* vb->vb2_queue = q;
* vb->num_planes = num_planes;
* vb->index = q->num_buffers + buffer;
* vb->type = q->type;
* vb->memory = memory;
* INIT_WORK(&vb->qbuf_work, __qbuf_work);
* spin_lock_init(&vb->fence_cb_lock);
* for (plane = 0; plane < num_planes; ++plane) {
* vb->planes[plane].length = plane_sizes[plane];
* vb->planes[plane].min_length = plane_sizes[plane];
* }
* vb->out_fence_fd = -1;
* q->bufs[vb->index] = vb;
*/
/* Finally, allocate buffers and video memory */
allocated_buffers =
__vb2_queue_alloc(q, memory, num_buffers, num_planes, plane_sizes);
if (allocated_buffers == 0) {
dprintk(1, "memory allocation failed\n");
return -ENOMEM;
}
/*
* There is no point in continuing if we can't allocate the minimum
* number of buffers needed by this vb2_queue.
*/
if (allocated_buffers < q->min_buffers_needed)
ret = -ENOMEM;
/*
* Check if driver can handle the allocated number of buffers.
*/
if (!ret && allocated_buffers < num_buffers) {
num_buffers = allocated_buffers;
/*
* num_planes is set by the previous queue_setup(), but since it
* signals to queue_setup() whether it is called from create_bufs()
* vs reqbufs() we zero it here to signal that queue_setup() is
* called for the reqbufs() case.
*/
num_planes = 0;
ret = call_qop(q, queue_setup, q, &num_buffers,
&num_planes, plane_sizes, q->alloc_devs);
if (!ret && allocated_buffers < num_buffers)
ret = -ENOMEM;
/*
* Either the driver has accepted a smaller number of buffers,
* or .queue_setup() returned an error
*/
}
mutex_lock(&q->mmap_lock);
q->num_buffers = allocated_buffers;
if (ret < 0) {
/*
* Note: __vb2_queue_free() will subtract 'allocated_buffers'
* from q->num_buffers.
*/
__vb2_queue_free(q, allocated_buffers);
mutex_unlock(&q->mmap_lock);
return ret;
}
mutex_unlock(&q->mmap_lock);
/*
* Return the number of successfully allocated buffers
* to the userspace.
*/
*count = allocated_buffers;
q->waiting_for_buffers = !q->is_output;
return 0;
}
4.4.6 _set_stream_on
具体调用sam_is_video_streamon==>vb2_streamon(vbq, type);==>vb2_core_streamon==>vb2_start_streaming==>sam_is_ssxin0_start_streaming==>sam_is_queue_start_streaming==>sam_is_sensor_back_start
/**
* @cnotice
* @prdcode
* @unit_name{device sensor::core}
* @purpose sensor device back start
* @logic sensor device frame manager, device manager start
* @params
* @param{in/out, qdevice, void *, Not null}
* @param{in/out, sub_sensor_id, int, >= 0, <= 3}
* @param{in/out, queue, struct * ::sam_is_queue, Not null}
* @endparam
* @retval{ret, int, 0, 0, < 0}
*/
static int sam_is_sensor_back_start(void *qdevice, int sub_sensor_id,
struct sam_is_queue *queue)
{
int ret = 0;
struct sam_is_device_sensor *sensor = qdevice;
struct sam_is_groupmgr *groupmgr;
struct sam_is_group *group;
SAM_BUG(!sensor);
if (test_bit(SAM_IS_SENSOR_BACK_START, &sensor->state)) {
err("already back start");
ret = -EINVAL;
goto p_err;
}
groupmgr = sensor->groupmgr;
group = &sensor->sub_sensor[sub_sensor_id].group_sensor;
ret = sam_is_group_start(groupmgr, group);
if (ret) {
smerr("sam_is_group_start is fail(%d)", sensor->sub_sensor[sub_sensor_id], ret);
goto p_err;
}
ret = sam_is_devicemgr_start(sensor->devicemgr, sub_sensor_id, (void *)sensor,
SAM_IS_DEVICE_SENSOR);
if (ret) {
smerr("sam_is_group_start is fail(%d)", sensor->sub_sensor[sub_sensor_id], ret);
goto p_err;
}
set_bit(SAM_IS_SENSOR_BACK_START, &sensor->state);
p_err:
sminfo("[SEN:D] %s(%dx%d, %d)\n", sensor->sub_sensor[sub_sensor_id], __func__,
sensor->image.window.width, sensor->image.window.height, ret);
return ret;
}
4.4.7 set_ctrl V4L2_CID_IS_S_STREAM
调用sam_is_ssxin0_video_s_ctrl ==>sam_is_sensor_front_start
//具体调用csi_s_stream ==>csi_stream_on
ret = v4l2_subdev_call(subdev_csi, video, s_stream, s_stream_param);
if (ret) {
smerr("v4l2_csi_call(s_stream) is fail(%d)", sensor->sub_sensor[sub_sensor_id],
ret);
goto p_err;
}
ret = v4l2_subdev_call(subdev_isppre, video, s_stream, s_stream_param);
csi_stream_on
/**
* @cnotice
* @prdcode
* @unit_name{csi}
* @purpose csi device stream on
* @logic tasklet setting and request interrupt, configurate phy and csi hw
* end enable
* @params
* @param{in/out, subdev, struct * ::v4l2_subdev, Not null}
* @param{in/out, csi, struct * ::sam_is_device_csi, Not null}
* @param{in/out, sub_sensor_id, int, >= 0, <= 3}
* @endparam
* @retval{ret, int, 0, 0, < 0}
*/
static int csi_stream_on(struct v4l2_subdev *subdev,
struct sam_is_device_csi *csi, int sub_sensor_id)
{
int ret = 0;
u32 settle;
u32 __iomem *base_reg;
struct sam_is_device_sensor *sensor = v4l2_get_subdev_hostdata(subdev);
struct sam_is_sensor_cfg *sensor_cfg;
#ifdef ENABLE_IRQ_MULTI_TARGET
unsigned int cpu = 0xff;
#endif
SAM_BUG(!csi);
SAM_BUG(!sensor);
if (test_bit(CSIS_DMA_ENABLE, &csi->state)) {
csi->sw_checker = EXPECT_FRAME_START;
/* Tasklet Setting */
//现在camera走的是issensor不是ischain,建立tastlet,当CSIS CORE IRQ有中断时表示frame start或end会进入中断函数sam_is_isr_csi,并执行csi_frame_start_inline,会执行tasklet中的关联函数
if (sensor->sub_sensor[sub_sensor_id].ischain &&
test_bit(SAM_IS_GROUP_OTF_INPUT,
&sensor->sub_sensor[sub_sensor_id].ischain->group_3aa.state)) {
switch (sub_sensor_id) {
case 0:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_0], tasklet_csis_str_otf_vc0,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_0], tasklet_csis_end_vc0,
(unsigned long)subdev);
set_bit(CSIS_VC0_ENABLED, &csi->state);
break;
case 1:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_1], tasklet_csis_str_otf_vc1,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_1], tasklet_csis_end_vc1,
(unsigned long)subdev);
set_bit(CSIS_VC1_ENABLED, &csi->state);
break;
case 2:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_2], tasklet_csis_str_otf_vc2,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_2], tasklet_csis_end_vc2,
(unsigned long)subdev);
set_bit(CSIS_VC2_ENABLED, &csi->state);
break;
case 3:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_3], tasklet_csis_str_otf_vc3,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_3], tasklet_csis_end_vc3,
(unsigned long)subdev);
set_bit(CSIS_VC3_ENABLED, &csi->state);
break;
default:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_0], tasklet_csis_str_otf_vc0,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_0], tasklet_csis_end_vc0,
(unsigned long)subdev);
set_bit(CSIS_VC0_ENABLED, &csi->state);
break;
}
} else {
switch (sub_sensor_id) {
case 0:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_0], tasklet_csis_str_m2m_vc0,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_0], tasklet_csis_end_vc0,
(unsigned long)subdev);
set_bit(CSIS_VC0_ENABLED, &csi->state);
break;
case 1:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_1], tasklet_csis_str_m2m_vc1,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_1], tasklet_csis_end_vc1,
(unsigned long)subdev);
set_bit(CSIS_VC1_ENABLED, &csi->state);
break;
case 2:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_2], tasklet_csis_str_m2m_vc2,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_2], tasklet_csis_end_vc2,
(unsigned long)subdev);
set_bit(CSIS_VC2_ENABLED, &csi->state);
break;
case 3:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_3], tasklet_csis_str_m2m_vc3,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_3], tasklet_csis_end_vc3,
(unsigned long)subdev);
set_bit(CSIS_VC3_ENABLED, &csi->state);
break;
default:
tasklet_init(&csi->tasklet_csis_str[CSI_VIRTUAL_CH_0], tasklet_csis_str_m2m_vc0,
(unsigned long)subdev);
tasklet_init(&csi->tasklet_csis_end[CSI_VIRTUAL_CH_0], tasklet_csis_end_vc0,
(unsigned long)subdev);
set_bit(CSIS_VC0_ENABLED, &csi->state);
break;
}
}
}
csi->vc_enable_count++;
if (test_bit(CSIS_START_STREAM, &csi->state)) {
warn("[CSI%d] already start", csi->position);
return ret;
}
sensor_cfg = csi->sensor_cfg;
if (!sensor_cfg) {
err("[CSI%d] sensor cfg is null", csi->position);
ret = -EINVAL;
goto p_err;
}
base_reg = csi->base_reg;
if (test_bit(CSIS_DMA_ENABLE, &csi->state)) {
/* Registeration of CSIS CORE IRQ */
ret = request_irq(csi->irq,
sam_is_isr_csi,
SAM_IS_HW_IRQ_FLAG,
"mipi-csi",
csi);
if (ret) {
err("[CSI%d] request_irq(IRQ_MIPICSI %d) is fail(%d)", csi->position, csi->irq,
ret);
goto p_err;
}
csi_hw_s_irq_msk(base_reg, true);
#ifdef ENABLE_IRQ_MULTI_TARGET
irq_set_affinity(csi->irq, (const struct cpumask *)&cpu);
#endif
}
if (!sensor->cfg) {
err("[CSI%d] cfg is NULL", csi->position);
ret = -EINVAL;
goto p_err;
}
settle = sensor->cfg->settle;
if (!settle) {
if (sensor_cfg->mipi_speed)
settle = csi_hw_find_settle(sensor_cfg->mipi_speed);
else
err("[CSI%d] mipi_speed is invalid", csi->position);
}
sminfo("[CSI] settle(%dx%d@%d) = %d, speed(%u Mbps), %u lane\n",
sensor->sub_sensor[sub_sensor_id],
csi->image.window.width,
csi->image.window.height,
csi->image.framerate,
settle, sensor_cfg->mipi_speed, sensor_cfg->lanes + 1);
//把从sensor cfg获取到的配置参数设置到CSI相关寄存器
/* PHY control */
/* PHY be configured in CSI driver */
csi_hw_s_phy_default_value(csi->phy_reg, csi->position);
csi_hw_s_settle(csi->phy_reg, settle);
ret = csi_hw_s_phy_config(csi->phy_reg, csi->sys_reg, sensor_cfg->lanes,
sensor_cfg->mipi_speed, settle, csi->position);
if (ret) {
err("[CSI%d] csi_hw_s_phy_config is fail", csi->position);
goto p_err;
}
/* PHY be configured in PHY driver */
ret = csi_hw_s_phy_set(csi->phy, sensor_cfg->lanes, sensor_cfg->mipi_speed,
settle, csi->position);
if (ret) {
err("[CSI%d] csi_hw_s_phy_set is fail", csi->position);
goto p_err;
}
csi_hw_s_lane(base_reg, &csi->image, sensor_cfg->lanes, sensor_cfg->mipi_speed);
csi_hw_s_control(base_reg, CSIS_CTRL_INTERLEAVE_MODE,
sensor_cfg->interleave_mode);
if (sensor_cfg->interleave_mode == CSI_MODE_CH0_ONLY) {
csi_hw_s_config(base_reg,
CSI_VIRTUAL_CH_0,
&sensor_cfg->input[CSI_VIRTUAL_CH_0],
csi->image.window.width,
csi->image.window.height,
sensor_cfg->rgb_swap);
} else {
u32 vc = 0;
for (vc = CSI_VIRTUAL_CH_0; vc < CSI_VIRTUAL_CH_MAX; vc++) {
csi_hw_s_config(base_reg,
vc, &sensor_cfg->input[vc],
sensor_cfg->input[vc].width,
sensor_cfg->input[vc].height,
sensor_cfg->rgb_swap);
sminfo("[CSI] VC%d: size(%dx%d)\n", sensor->sub_sensor[sub_sensor_id], vc,
sensor_cfg->input[vc].width, sensor_cfg->input[vc].height);
}
}
csi_hw_enable(base_reg);
if (unlikely(debug_csi)) {
csi_hw_dump(base_reg);
csi_hw_phy_dump(csi->phy_reg, csi->position);
}
set_bit(CSIS_START_STREAM, &csi->state);
p_err:
return ret;
}
至此处cameraCoreTest工具调用流程就结束了,后面我们分析数据流
qbuffer和dqbuffer 部分参考如下文章:
高通msm-V4L2-Camera驱动浅析5-buffer
Linux V4L2子系统-videobuf2框架分析(三)
V4L2 videobuffer2的介绍,数据流分析
vb2_buffer结构探究


















 342
342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











