 MC9S12G128开发板通过CAN通信控制车辆移动
MC9S12G128开发板通过CAN通信控制车辆移动





 文章展示了如何使用MC9S12G128开发板通过1939协议和CAN通信来控制模拟车辆的移动,并通过按键查询和发送报文给上位机,指示车辆的上下左右移动状态。开发板上的四个按键分别对应不同的移动方向,当按键被按下时,发送相应的CAN报文更新上位机界面显示的车辆位置。
文章展示了如何使用MC9S12G128开发板通过1939协议和CAN通信来控制模拟车辆的移动,并通过按键查询和发送报文给上位机,指示车辆的上下左右移动状态。开发板上的四个按键分别对应不同的移动方向,当按键被按下时,发送相应的CAN报文更新上位机界面显示的车辆位置。
实验环境:MC9S12G128开发板
基本功能:控制开发板上的按键,模拟车辆移动的上下左右四个方位,通过can通信告诉上位机界面,车辆轨迹的移动方位。
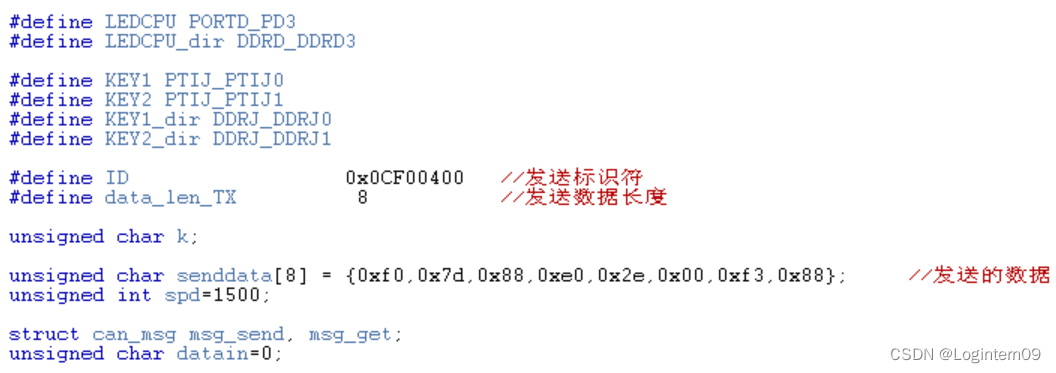
1. 1939报文发送的示例代码
MC9S12G128开发板1939协议发送can报文数据的示例代码如下:
/*************************************************************/
/* 主函数 */
/*************************************************************/
void main(void) {
DisableInterrupts;
INIT_PLL();
initialize_TIM();
INIT_CAN();
init_key();
LEDCPU_dir=1;
LEDCPU=0;
EnableInterrupts;
//填写报文内容
msg_send.id = ID;
for(k=0;k<data_len_TX;k++)
{
msg_send.data[k] = senddata[k];
}
msg_send.len = data_len_TX;
msg_send.RTR = FALSE;
msg_send.prty = 0;
for(;;)
{
delay1ms(500);
if(!MSCANSendMsg(msg_send)) //发送过程出现错误
for(;;);
else
LEDCPU=~LEDCPU;
}
}
2. 按键查询的示例代码
MC9S12G128开发板的按键查询的示例代码如下:
/*************************************************************/
/* 主函数 */
/****************** 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1122
1122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











