







1.摘要
近年来,路径规划一直是移动机器人领域最受关注的问题之一。本文探讨了一个多目标路径规划问题,重点在于最小化路径长度和最大化路径安全性。基于该问题的特点,建立了数学模型,并提出了一种增强人工蜂群算法(EABC),设计了一种新的混合初始化策略,用于生成高质量的初始种群。在雇佣蜂阶段,除了交叉和变异算子外,还开发了两个面向目标的进化算子。在 旁观蜂阶段,分别对非支配个体和支配个体应用了两种自学习优化机制。基于协作的优化机制旨在提高非支配个体的质量。支配引导优化机制则引导支配个体向非支配个体学习。在侦察蜂阶段,探讨了一种新的个体重启策略,该策略考虑了全局最优解的有用信息,从而提高了算法的探索能力。
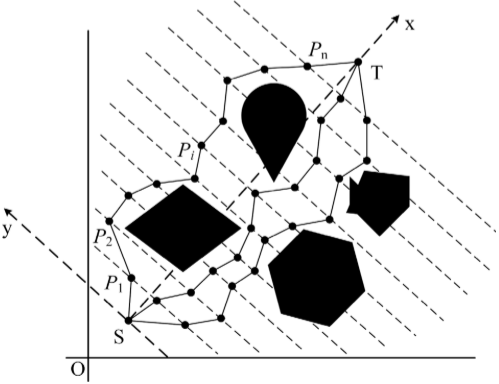
2.多目标路径规划数学模型
假设环境为静态并作为一个离散配置空间通过整数坐标表示;所有障碍物被视为静态多边形;同时,使用Minkowski和的多边形机器人被简化为一个单一的点,并且机器人具备已知环境信息。
路径长度
路径长度尽量短,采用欧式距离度量:
L
(
P
a
t
h
)
=
∑
i
=
0
n
d
(
P
i
,
P
i
+
1
)
\begin{aligned} L(Path)=\sum_{i=0}^nd(P_i,P_{i+1}) \end{aligned}
L(Path)=i=0∑nd(Pi,Pi+1)
路径安全性
路径安全性用来评估路径与周围障碍物之间的风险程度,本文通过计算可行路径与障碍物之间的最小距离来衡量路径安全性,这与大多数现有研究不同。为了提高路径安全性并最小化目标函数,路径安全目标:
S
(
P
a
t
h
)
=
−
min
0
≤
i
≤
n
min
1
≤
j
≤
m
{
m
i
n
d
i
s
t
a
n
c
e
(
P
i
P
i
+
1
‾
,
O
j
)
}
S\left(Path\right)=-\min_{0\leq i\leq n}\min_{1\leq j\leq m}\left\{mindistance\left(\overline{P_iP_{i+1}},O_j\right)\right\}
S(Path)=−0≤i≤nmin1≤j≤mmin{mindistance(PiPi+1,Oj)}
因此,多目标机器人路径规划数学模型:
{
P
a
t
h
=
[
S
,
P
1
,
P
2
,
…
,
P
n
,
T
]
M
i
n
i
m
i
z
e
L
(
P
a
t
h
)
M
i
n
i
m
i
z
e
S
(
P
a
t
h
)
s
.
t
.
P
a
t
h
∩
O
=
∅
\begin{cases} Path=[S,P_1,P_2,\ldots,P_n,T] \\ \quad Minimize\quad L(Path) \\ \quad Minimize\quad S(Path) \\ \quad s.t.\quad Path\cap O=\emptyset & \end{cases}
⎩
⎨
⎧Path=[S,P1,P2,…,Pn,T]MinimizeL(Path)MinimizeS(Path)s.t.Path∩O=∅
3.人工蜂群算法ABC
4.自学习人工蜂群算法EABC
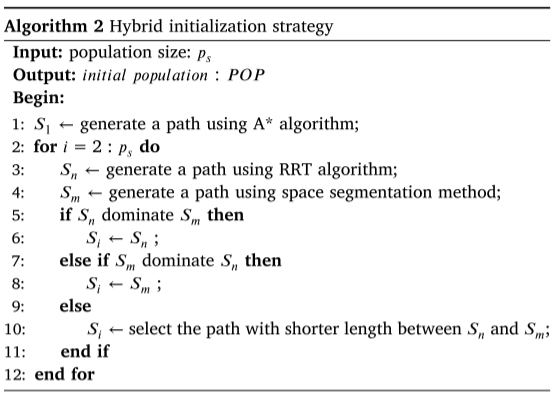
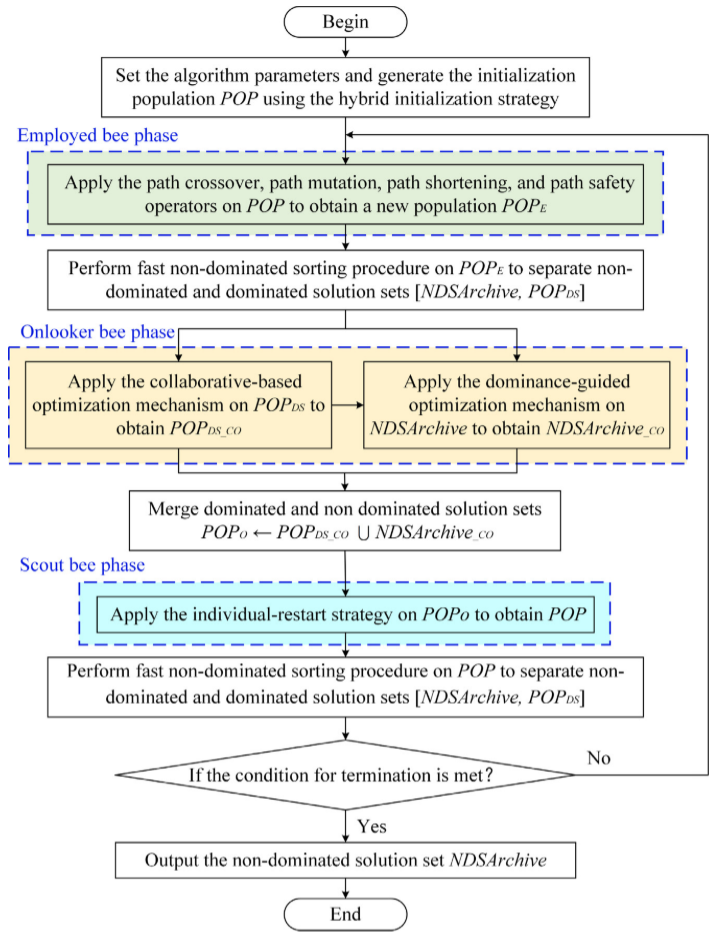
混合初始化策略
混合初始化策略旨在提高初始种群的质量。在本文中,初始种群通过三种经典的路径规划方法生成:A* 算法、RRT算法和空间分割方法。A* 算法用于生成优化路径长度的解;空间分割方法通过等间隔的垂直线划分起点和目标点之间的空间,随机选择点并连接形成路径;RRT算法则通过从起点扩展树结构,探索高维空间以生成覆盖尽可能多解空间的路径。利用这三种方法,初始种群可以包含不同类型的路径(如线覆盖、区域覆盖和表面覆盖),从而增强种群的多样性。通过结合这三种方法的优势,生成了一个多样化且高质量的初始种群。
雇佣蜂阶段
雇佣蜂阶段对种群中的所有解进行开发操作,本文开发了四种路径操作算子:路径交叉、路径变异、路径缩短和路径安全,用来增强EABC算法的开发能力。
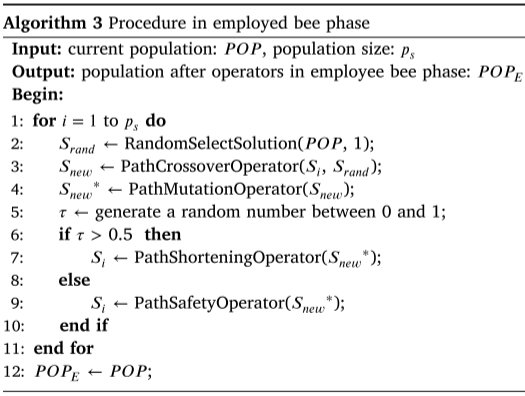
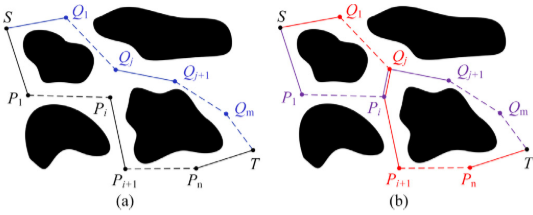
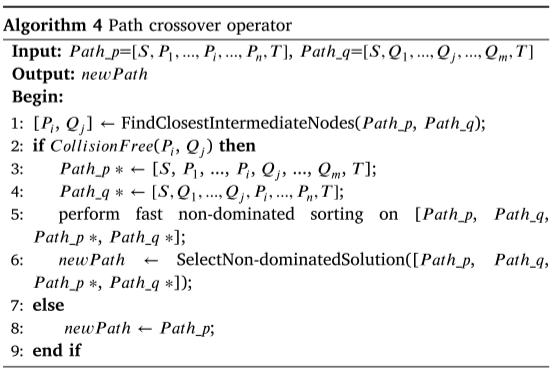
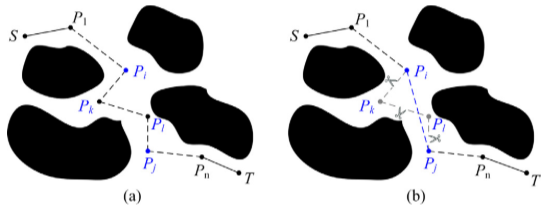
路径交叉算子通过交换父代路径的路径段,生成包含有利特征的后代路径。通过交换两个选定路径之间的路径段,生成一个新的可行路径。
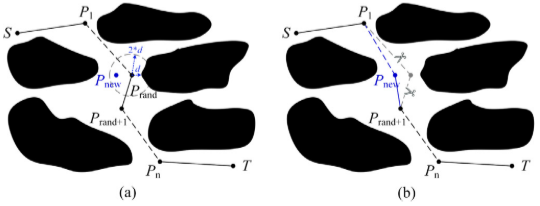
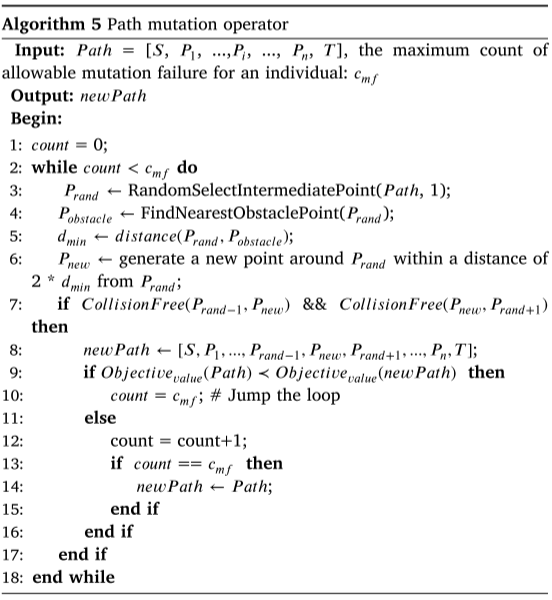
路径变异算子在现有解的周围进行局部搜索,提升解的质量。路径变异可以通过多点变异或单点变异来实现。与多点变异相比,单点变异具有更好的稳定性,并对可行路径的干扰较小。
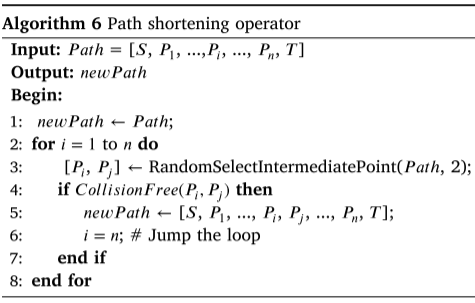
路径缩短算子旨在减少路径长度。由于路径上的中间点数量可变,删除冗余点是减少路径长度的一种有效方法。
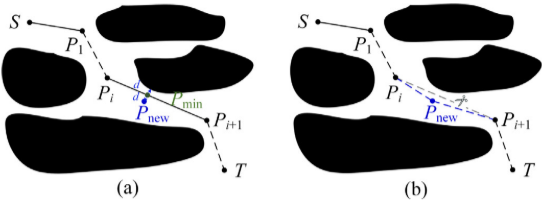
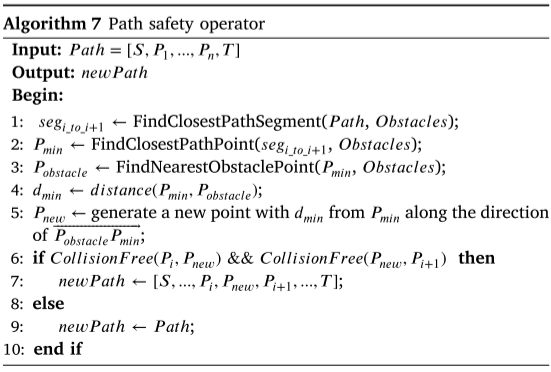
路径安全算子提升路径安全性,减少与障碍物的碰撞风险。与大多数研究不同,本文基于路径与障碍物的最小距离来衡量路径安全性。该算子通过选择路径段中与障碍物最接近的点,并努力改善该路径段的轨迹,以尽可能避开障碍物。
旁观蜂阶段
旁观蜂阶段主要侧重于围绕选定优质解进一步进行开发。此阶段将解根据支配关系分为两组:对于非支配个体,应用基于协作优化机制以增强算法的收敛性;对于支配个体,采用基于支配引导优化机制。
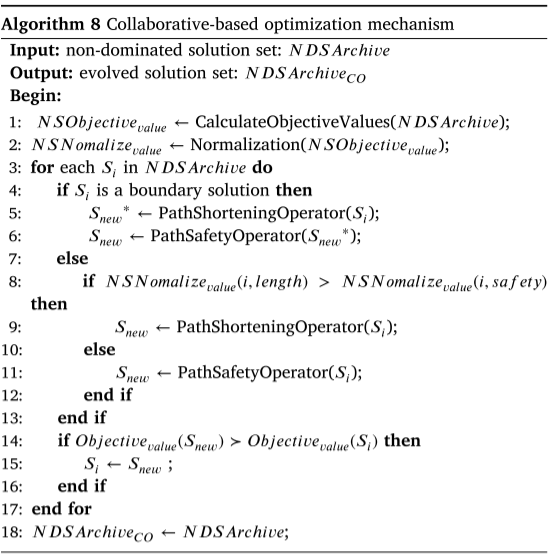
基于协作优化机制
非支配个体的特性有助于引导进化算法选择合适的局部搜索算子,有效地探索目标空间并改进目标值。为了提高非支配解对算法收敛性的正向影响,研究提出了基于协作优化机制。非支配解被进一步划分为边界解和非边界解,其中边界解指在某个目标上达到最优值的路径,如最佳路径长度或路径安全性。其余非支配解被视为非边界个体。
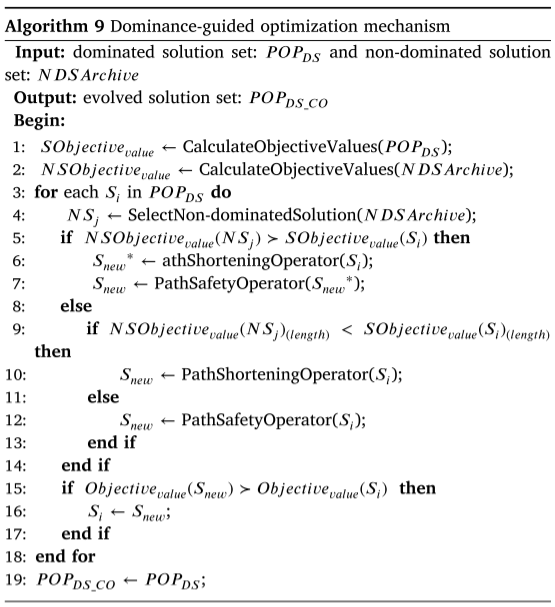
基于支配引导优化机制
基于支配引导的优化机制旨在帮助支配个体快速接近帕累托前沿,从而加速EABC算法的收敛。
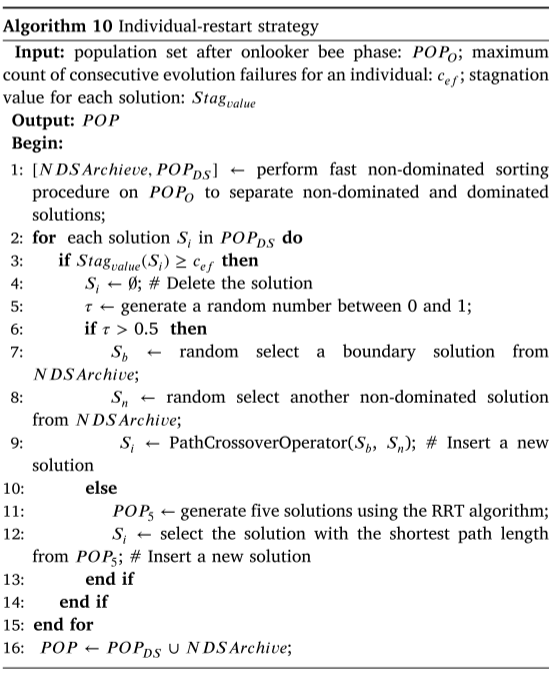
侦察蜂阶段
侦察蜂阶段通过替换停滞的进化解来维持种群质量。为了识别停滞解,统计每个解的连续进化失败次数。本文提出了一种个体重启策略利用最优解的有用信息生成新解,该策略不仅继承帕累托前沿的优良特征,还保持种群的多样性,避免解的过度收敛。
5.结果展示
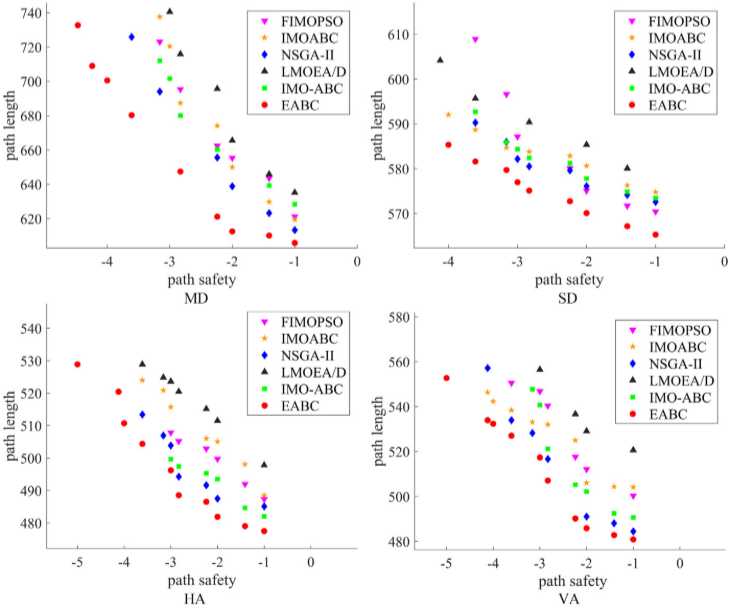
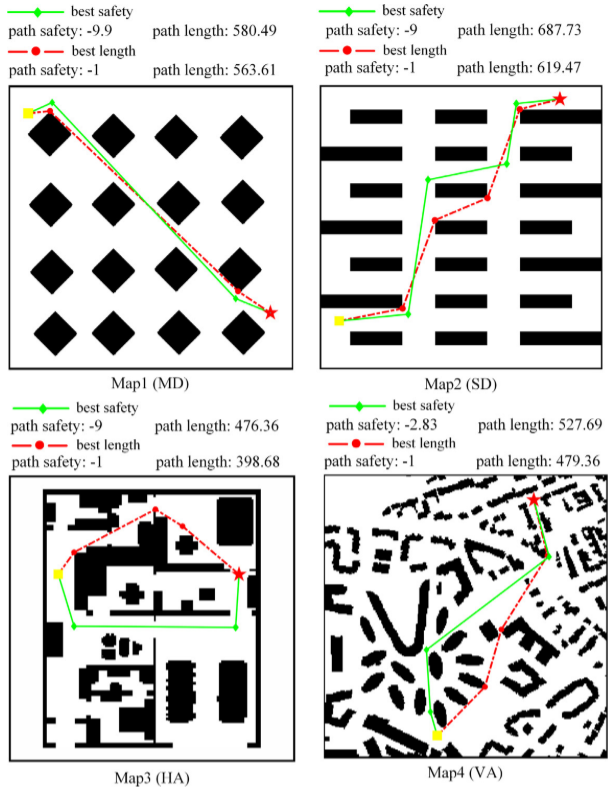
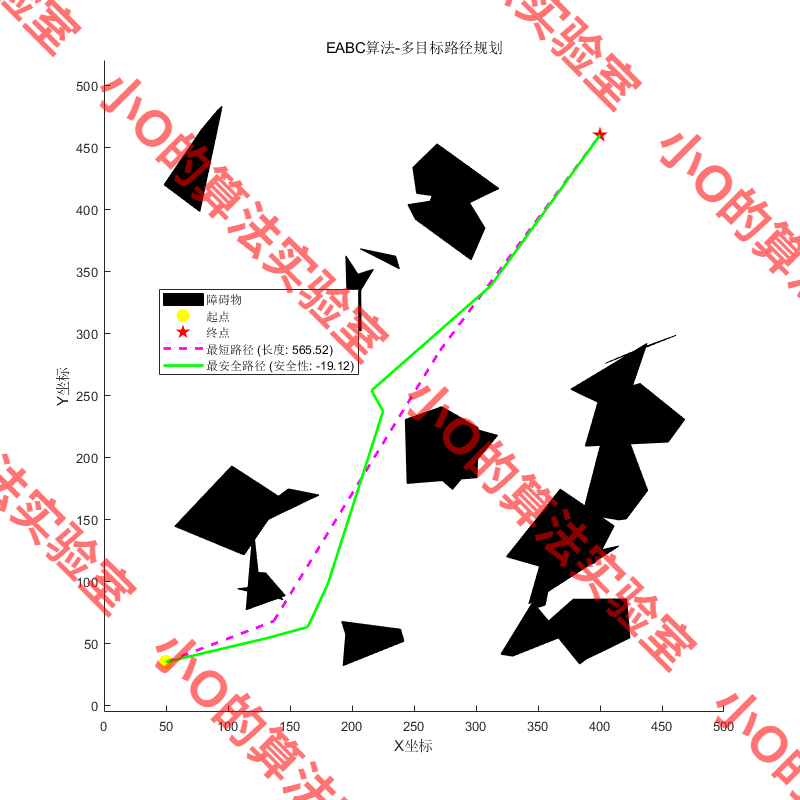
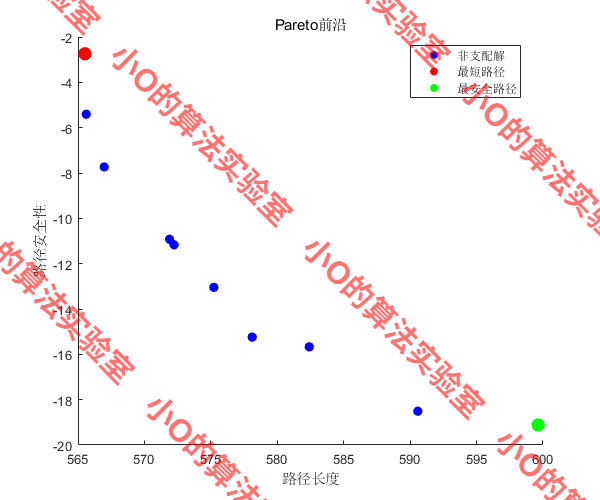
复现算法结果:
6.参考文献
[1] Ye F, Duan P, Meng L, et al. An enhanced artificial bee colony algorithm with self-learning optimization mechanism for multi-objective path planning problem[J]. Engineering Applications of Artificial Intelligence, 2025, 149: 110444.
7.代码获取
xx



















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











