




 本文详细介绍了激光雷达的性能指标,包括线数、波长、安全等级、测距能力、盲区、精度、视场角、角分辨率、帧率和转速等,帮助读者理解这些参数对自动驾驶和测绘应用的重要性。
本文详细介绍了激光雷达的性能指标,包括线数、波长、安全等级、测距能力、盲区、精度、视场角、角分辨率、帧率和转速等,帮助读者理解这些参数对自动驾驶和测绘应用的重要性。
很多小伙伴们表示可以分辨大类,但是一些具体的功能参数还是不太了解,那么本期我们将来介绍一下激光雷达的性能指标。

先给小伙伴们做一个小测试,
比如下图是一款128线激光雷达产品的参数表,大家能看懂吗?
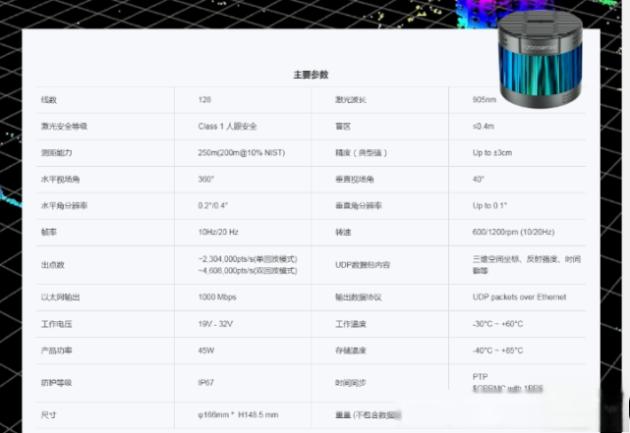
图片来源速腾聚创官网
看不懂也没关系,相信看完我们今天的文章,
你就可以看懂啦~
下面我们一个一个的来说
1
线数
车载激光雷达一般使用多线雷达,就是在垂直方向上具有多个发射器和接收器。对于激光雷达来说,线数越多、越密意味着可以更清晰、更完善的收集各类物体3D轮廓,目前自动驾驶车辆上大多使用16线、32线、64线、128线等。
在类似于测绘,自动驾驶等场景下,激光雷达肯定是线数越高越好,但也有一个缺点,那就是
02
波长
目前市场上三维成像激光雷达最常用波长分两种,即905nm和1550nm。
两者相比之下,波长为1550nm的激光雷达所使用的铟镓砷(InGaAs)近红外探测器要比波长为905nm所使用的硅基光电探测器更贵,所以二者的成本会有区别,其实还是
所谓一分价钱一分货,1550nm激光雷达的激光器功率是传统905nm硅光电系统的40倍;还有效解决了905纳米对雨雾的穿透力的不足的问题,因此在复杂气候天气下也能将有效探测距离保持在200米以上。
同时1550nm波长的激光也更加安全,对人眼没有危害。原因在于,要让激光雷达「看得更远」,就必须发射更强的光脉冲,然而波长越长能量越低,距离可见光越远。905纳米的激光,这对于人类来说是不可见的。但是如果它集中到了一个真人的眼球,而且具有足够的能量时,就会损伤人类的视网膜。相比之下1550纳米的激光,它在光谱的红外线部分距离可见光波段更远,因此无法穿透人的眼球。
03
激光安全等级
上述有提到了激光对人眼的伤害,其实国际电工委员会(IEC)已经制定了安全标准,它依据激光产品的波长、最大输出激光功率或能量,将激光产品分为7大安全等级,车载激光雷达一般要求人眼安全级别为Class1。

04
测距能力和盲区
这两个我们放一起谈,首先测距能力(量程),即能有效检测到最近和最远距离,另外目标的反射率越高则测量距离越远,目标的反射率越低则测量距离越近。
比如参数表中的“200m@10%反射率”意思是激光雷达发射光束到200米的距离可以看清最低10%光线反射率的物体,比如一张白纸。
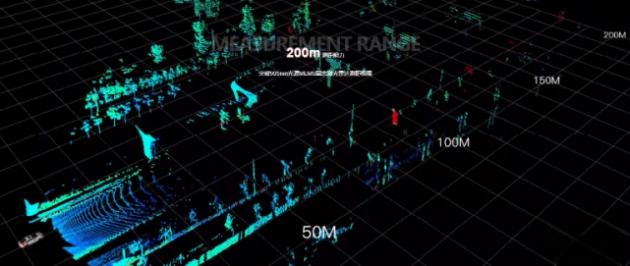
图片来源速腾聚创官网
盲区,顾名思义是激光雷达无法接收到激光回波信号的距离。一句话概括就是在可视范围之外即为盲区。感觉有点像游戏场景中的战争迷雾哈。
图片来源帝国时代
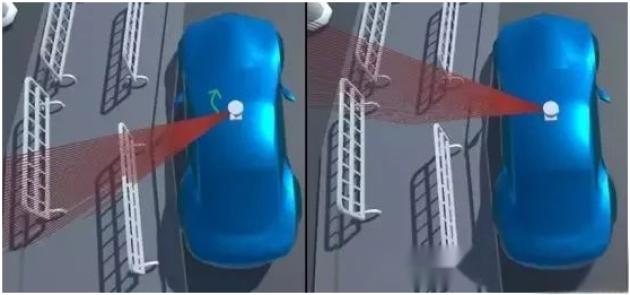
而盲区也会因为距离过近而产生,比如下图中,当物体紧贴激光雷达光罩时,性能好的激光雷达产品依然能够有效探测,做到“零盲区”,而有的激光雷达在0.2米时就产生盲区无法成像了。
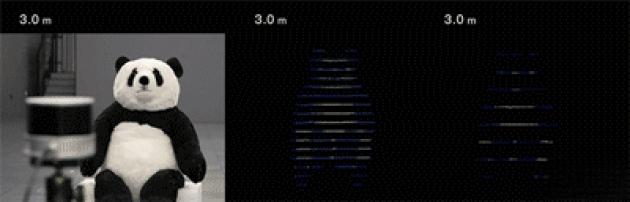
激光雷达盲区对比展示(图片来源禾赛科技官网)
这里顺带说一句,对于四维图新而言,虽然激光雷达测距能力(量程)性能不一样,但是四维图新的自动驾驶解决方案,能根据不同传感器的特点和指标,调配出最优方案,保障感知的精度和Robust,例如将激光雷达安装在车体某些位置和固定角度,再通过四维图新自有传感器融合算法来有效解决此问题,该解决方案已先后通过北京市自动驾驶路测T3牌照以及合肥市智能网联汽车开放道路测试牌照。

四维图新自动驾驶车
05
精度
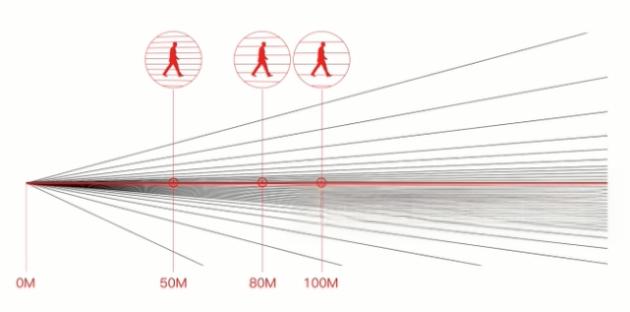
精度,即雷达可以感知的距离最小变化值。通常来说目标距离激光雷达越远测距准确度越低。以人眼为例,10米距离上我们可以清晰看到一个酒瓶盖大小的物体,而200米后就看不见了。如下图,激光雷达点云数量随着汽车物体的远近而降低,车体边界轮廓精度随之下降。
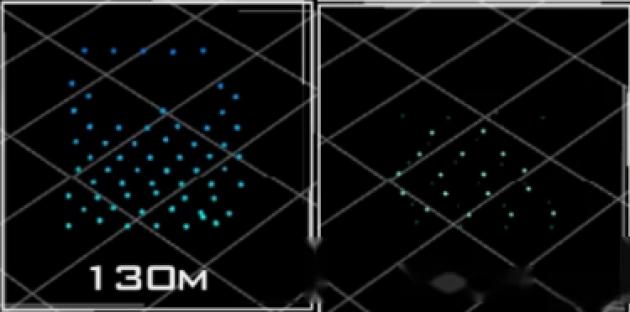
图片来源速腾聚创官网
06
视场角FOV
视场角FOV(FieldofView),即有效扫描角度,在该角度范围内目标物体可被检测到,它分为水平视场角和垂直视场角。以人眼为例,就是你直视前方时可以看到的上下和左右范围。
水平视场角,即是水平面上所侦测的范围,以64线激光雷达为例,单纯的64线激光束的范围是远远不够的,但如果增加线束的范围又会大大增加成本,所以诞生了安装马达的机械旋转式激光雷达,这样就可以配合旋转的动作形成360°水平视场角,而固态式激光雷达只能看到正前方某些度数(例如60°至120°);
VelodyneHDL-64E水平扫描示意图
垂直视场角,垂直方位角指的是激光雷达垂直方向的检测角度,一般在40°以内。而且光束也不是垂直均匀分布的,而是中间密,两边稀疏,而且激光光束会尽量向下偏置一定的角度,这也是为了扫描到更多的障碍物,在一定程度上可弥补上面说过的近处盲区。
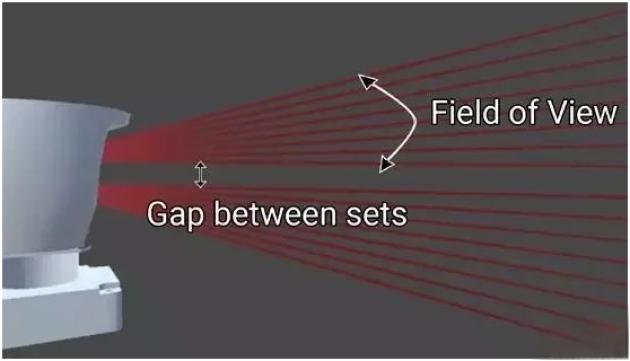
VelodyneHDL-64E垂直扫描示意图
07
角分辨率
角分辨率,表示两个相邻测距点的角度。如下图,它也分为水平角分辨率和垂直角分辨率,如上面的FOV一样,水平角分辨率和垂直角分辨率分别表示水平面上点的夹角以及垂直面上点的夹角,这里就不过多赘述。
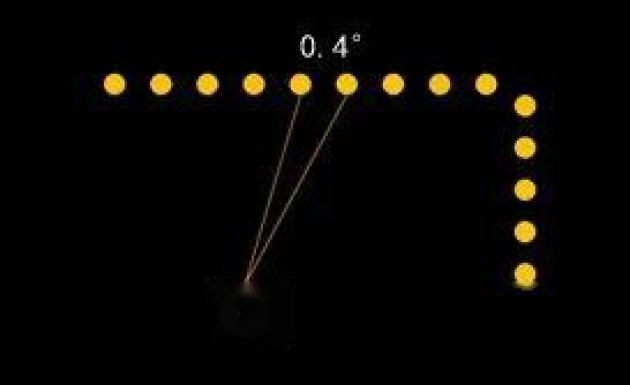
角分辨率示意图
另外,角分辨率大小决定了一次扫描能返回的样本点数以及该激光雷达所能检测的最小障碍物大小,比如2个激光光束相邻测距点的角度为0.4°,那么当探测距离为200m的时候,2个激光光束之间的距离为200m*tan0.4°≈1.4m。也就是说在200m之后,只能检测到高于1.4m的障碍物了。
图片来源速腾聚创官网
08
帧率
帧率,扫描频率表示一秒内雷达进行多少次扫描,其计量单位是HZ(赫兹是电,磁,声波和机械振动周期循环时频率的单位。即每秒的周期次数“周期/秒”)。扫描频率越大,设备对外界环境的感知速度越快,系统实时性更高。
09
转速
转速,转速的国际标准单位为rps(转/秒)或rpm(转/分),1200rpm意思是当前激光雷达的马达引擎转速是每分钟转1200圈。与帧率一样,转速越高设备对外界环境的感知速度越快。
10
出点数
出点数(分单回波模式和双回波模式),就是单位时间内激光雷达可以扫描多少个点位。
我们以128线机械旋转激光雷达为例计算一下出点数:
已知:
机械旋转式激光雷达是360°水平视场角
10Hz帧率(每秒扫描转10圈),也就是每100ms(10Hz)转360度
水平角分辨率为0.2°
所以,当水平角分辨率为0.2°,旋转一周将会产生360/0.2=1800个点
最终,出点数为128线*1800个点*10HZ=2304000点/秒(pts/s)
11
其他部分
对于车厂来说,车上所有电器元件的供电电压、产品功率、产品工作温度、IP防尘风水等防护等级都是非常重要的采购指标,这里就不是我们需要关注的啦。

















 47
47

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









