







 本文详细介绍了STM32微控制器中增量式编码器的应用,重点讲解了使用定时器2配置编码器模式的方法,包括如何正确设置参数以实现方向判断和计数,并通过实例演示了如何读取编码器计数值。
本文详细介绍了STM32微控制器中增量式编码器的应用,重点讲解了使用定时器2配置编码器模式的方法,包括如何正确设置参数以实现方向判断和计数,并通过实例演示了如何读取编码器计数值。
stm32 的Encoder 使用
增量式编码器在实际应用中还是很常见。
stm32的定时器带的也有编码器模式。
所用的编码器是有ABZ三相,其中ab相是用来计数,z相输出零点信号。
AB相根据旋转的方向不同,输出的波形如下图所示: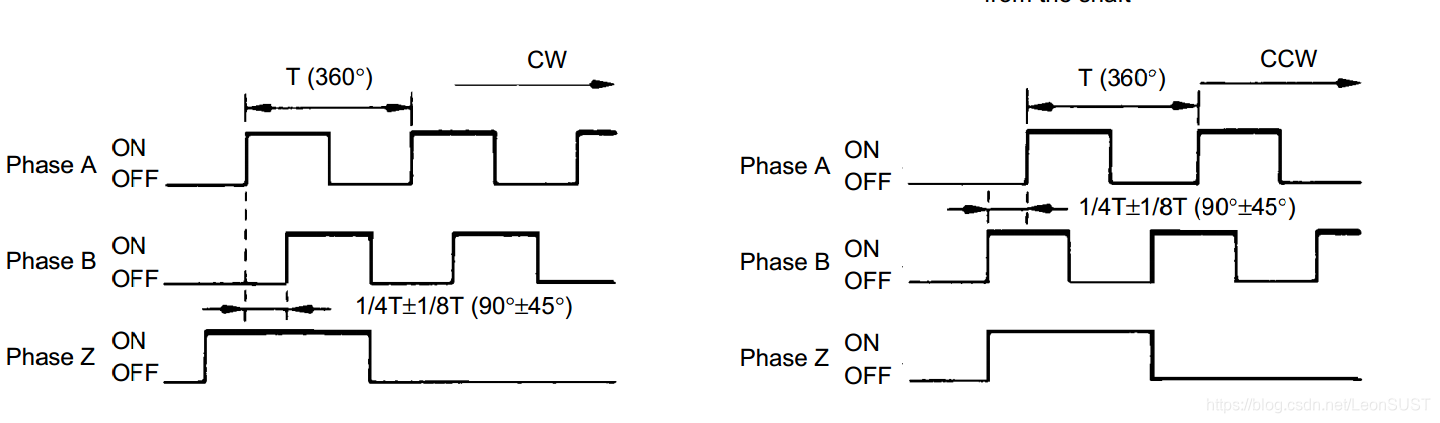
从图上可以看出来,cw方向A相会超前B相90度左右,相反CCW方向,B相会超前A相90度左右。不过方向判断stm32自己是可以完成的。下面是使用stm32cubeMx配置的过程。
环境
软件:stm32cubemx mdk 芯片型号:stm32F407IGH6 使用的是定时器2
步骤
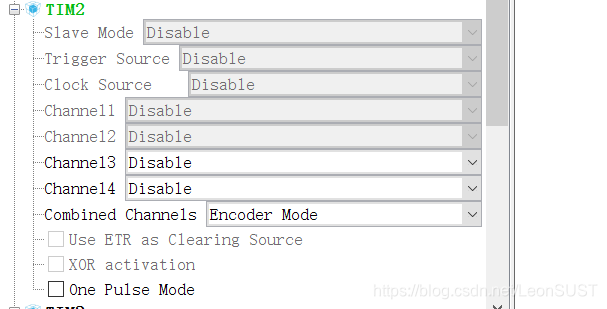
1 首先打开timer2的encoder模式:
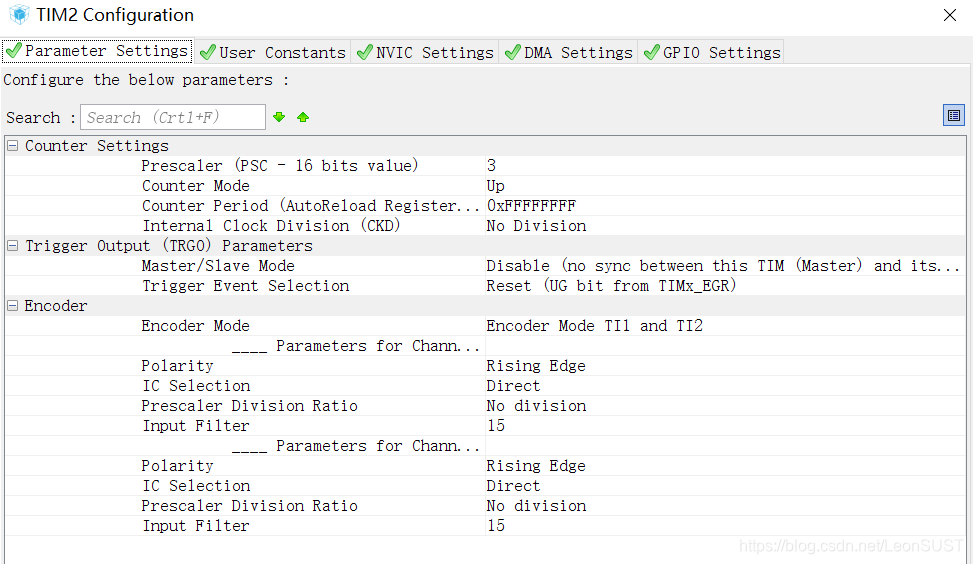
2 下面才是重点,配置具体定时器的参数:
选择的encoderMode是 **TI1和TI2模式。这种模式下,AB两相的上升沿和下降沿都会计数,所以计数值是实际值的4倍,需要做分频。**也就是第一个参数,分频值设为3,实际上是3+1=4分频。
还有个地方需要解释一下,我刚开始的时候就是把这里的设置没搞清楚,看Polarity参数设置的是Rising Edge。这个参数的意思是在检测到上升沿的时候就触发encoder捕获AB相的值,而并不是这里设置的是上升沿就只检测AB相的上升沿,下降沿还是同样会计数的。
Input Filter滤波值是从1-15,看情况设定,是用来滤除一些杂波的。
3 生成代码
这样基本就配置好了,生成mdk工程。
然后就是添加应用代码了。
在初始化中添加打开定时器的encoder模式:
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
然后定期调用下面这一句函数就可以获取到encoder编码器的计数值:
enc1 = (uint32_t)(__HAL_TIM_GET_COUNTER(&htim2));//获取定时器的值

















 2882
2882

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









