






一、前言
最近在做无人机建图的相关工作,基本的方案是ORB SLAM2+Map2DFusion。
在调试好代码后,我利用大疆精灵4在附近的一个公园进行算法测试,得到的效果图如下:
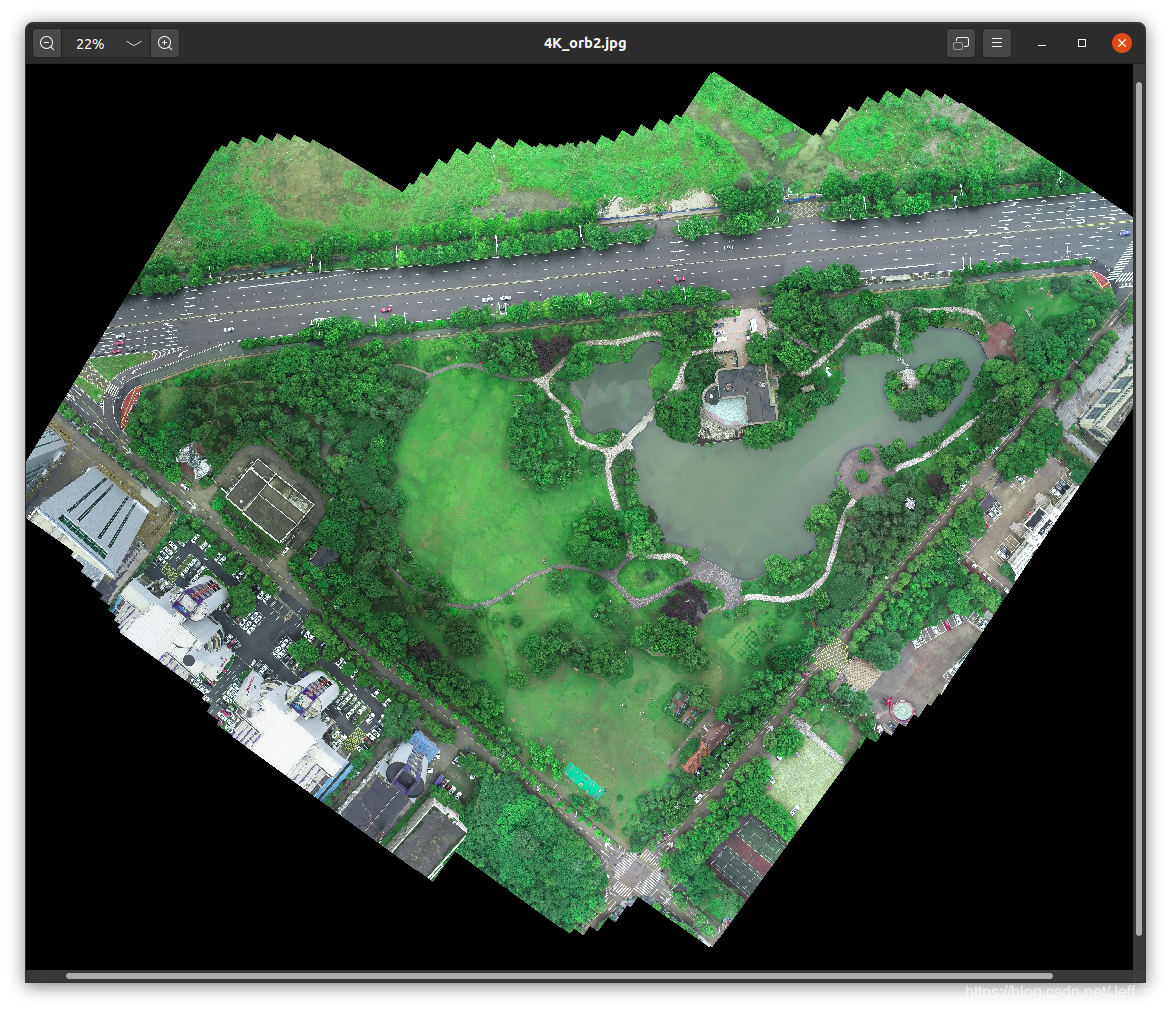
但在一些细节上会有明显的断裂感,比如这个:
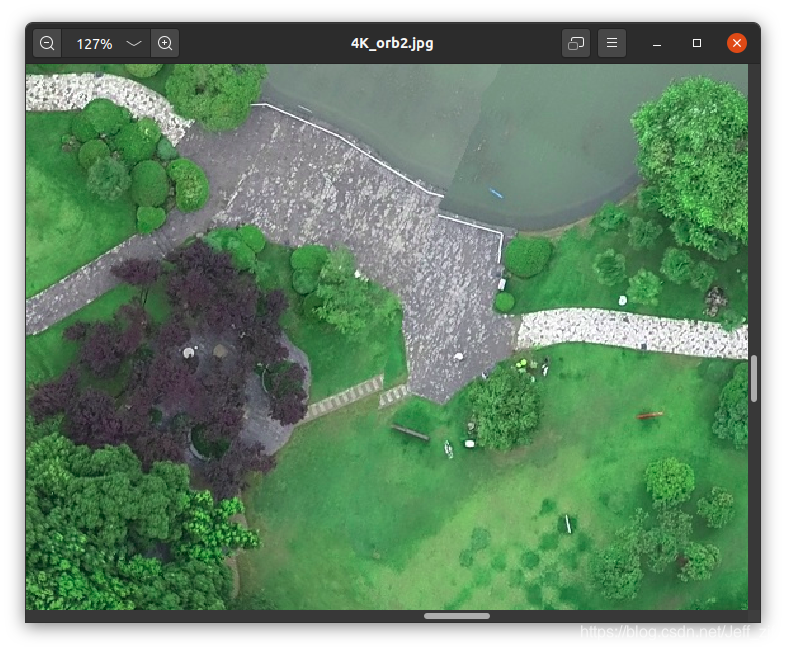
二、问题分析
出现这个现象的本质原因是ORB SLAM2进行相机位姿重构时,精度不够高,导致建图拼接的结果产生明显的断裂感。
改善这个问题的办法在于提高SLAM的精度。在Map2DFusion论文中提到将GPS数据融合到SLAM中,我就从这个方向入手,看有没有效果。
三、实践过程
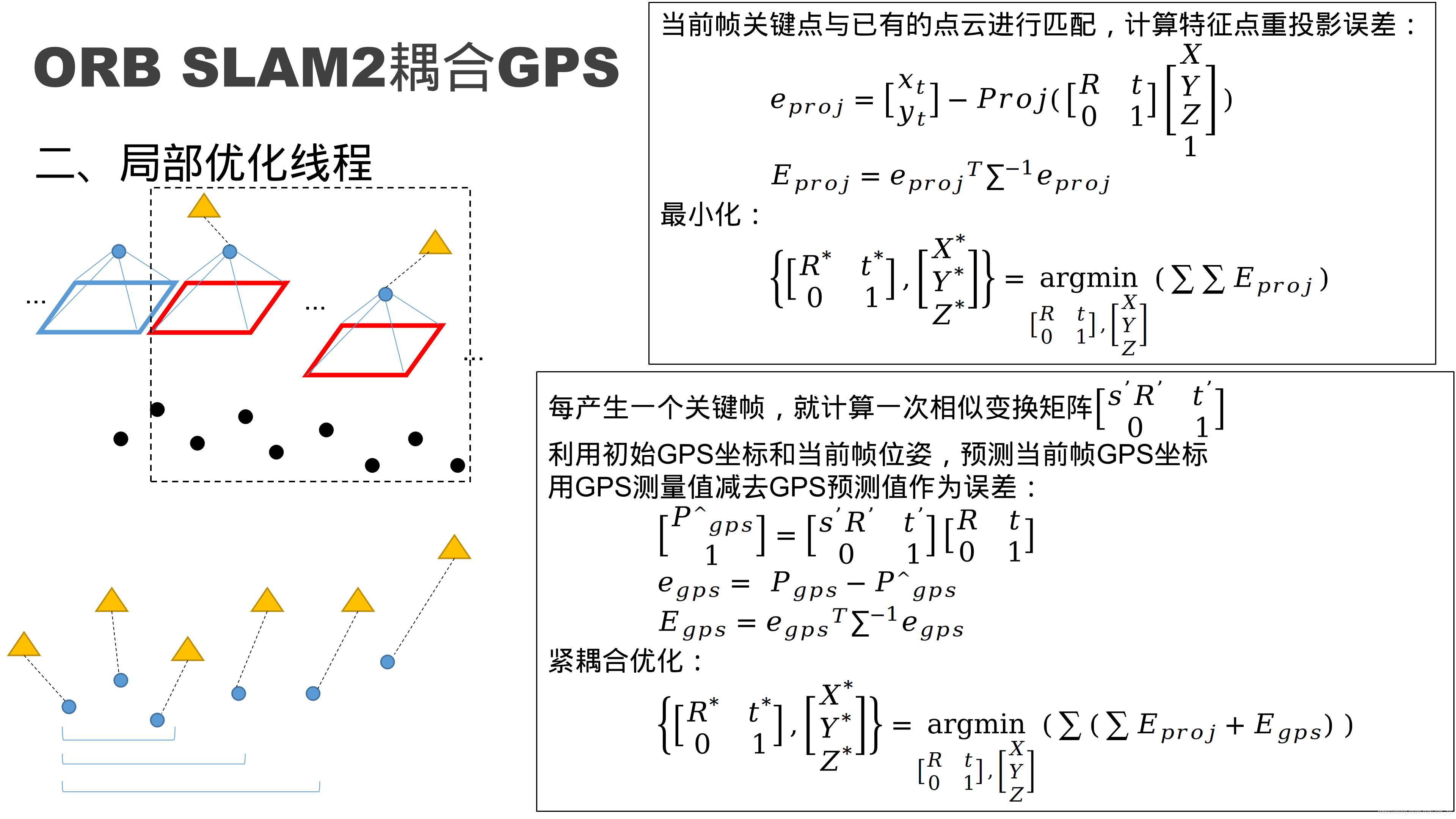
我从ORB SLAM2的局部优化线程入手,局部优化的内容是在一个共视图窗口(上图虚线框示意)内,通过将点云重映射到关键帧像素坐标系内,与ORB匹配关键点坐标计算误差,这里称它为重投影误差。然后用Bundle Adjustment最小化这个误差。
我的思路是用过去n个时刻的关键帧的SLAM坐标和GPS坐标计算SLAM坐标系与GPS坐标系之间的相似变换矩阵。当产生第n+1个时刻关键帧的SLAM坐标时,用上图右下框的式子预测GPS坐标,与GPS观测值的坐标做差求误差,将这个误差加到原有的误差函数中,就完成了SLAM对GPS的融合。
但实际程序跑下来,无人机建图的效果并没有肉眼上可分辨的提高。当我加大GPS误差在总误差的权重时,效果反而变差了。
四、思考
可能我的想法本身有问题,因为我读取到的无人机GPS数据是有时间延迟的,我假设这个时间延迟足够小到可以忽略。或许实际上它并不能忽略。
或许是GPS本身就不适合优化视觉SLAM。因为相对来说GPS是低精度高延迟累积误差小,视觉SLAM是高精度低延迟累积误差大。GPS适合用来减小视觉SLAM的累积误差(或许可以用在回环检测中)。从另一个角度,或许应该用高频的数据去优化低频的数据(这一点类似VIO中用IMU去优化视觉SLAM)。
或许,应该用视觉SLAM去优化GPS定位,而不是用GPS定位去优化视觉SLAM。
以上想法纯属个人思考,没有实验支持,有错之处望谅解。

















 579
579

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









