




SLAM,即同时定位与地图构建(Simultaneous Localization and Mapping),是机器人和自主系统领域中的核心技术。简单来说,SLAM技术允许机器人在未知环境中,通过传感器实时获取数据,同时确定自己的位置并构建周围环境的地图。这种技术对于实现机器人自主导航、AR等任务至关重要。
说到建图、定位与导航,很自然就能联想到3S,即遥感(Remote Sensing)、地理信息系统(Geographic Information System) 和全球导航卫星系统( Global Navigation Satellite System)。遥感技术是信息采集(提取)的主力;全球定位系统是对遥感图像(像片)及从中提取的信息进行定位,赋予坐标,使其能和"电子地图"进行套合;地理信息系统是信息的"大管家"。
但是这与SLAM有什么关系呢?
3S负责全球尺度的建图与定位,SLAM负责一个房间或者一栋楼这样小尺度的建图与定位。GPS在户外好用,但是在室内使用GPS时,往往存在信号差、定位不准确的缺点。遥感系统负责从天上往地上看,看不到室内的结构,在对建筑物进行还原时,也往往不如直接在地面拍摄的清楚。很容易想到,要是能够直接在地面使用其他传感器数据作为补充,融入3S体系该有多好。
再来看SLAM,根据使用的传感器类型和处理方法,可以分为多种不同的类别,每种都有其特定的应用场景和优势。
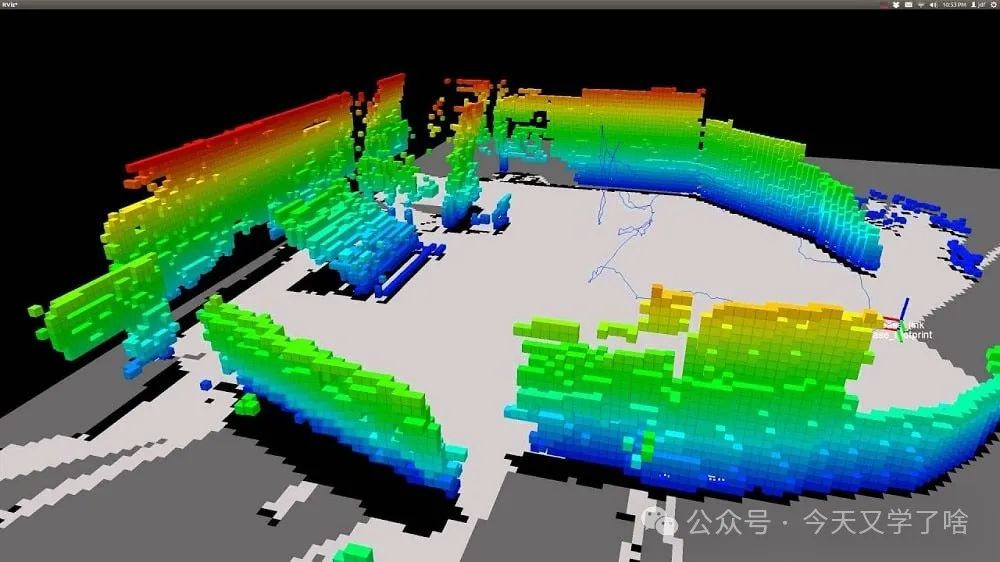
激光雷达(LiDAR)SLAM通过发射激光脉冲并接收反射回来的信号来测量距离,从而获取环境的三维信息。激光SLAM以其高精度和对环境光照变化的不敏感性著称,特别适合于室外环境或需要高精度地图的场景,如自动驾驶汽车、无人机导航和工业自动化。代表性算法有LOAM(Lidar Odometry and Mapping)和LeGO-LOAM(Lightweight and Ground-Optimized LOAM)。

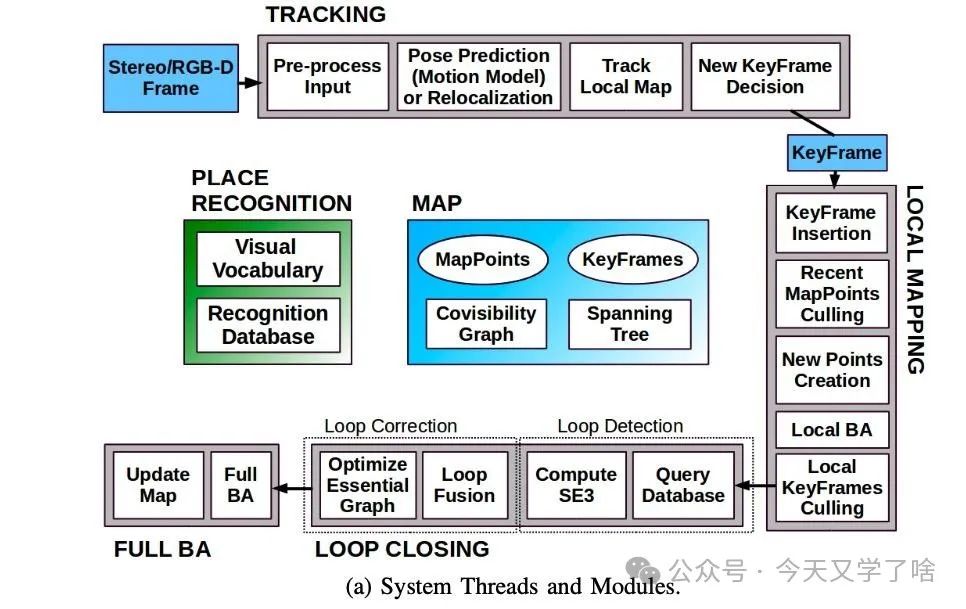
视觉SLAM主要依赖摄像头采集的图像数据来估计机器人或相机的运动,并构建环境地图。它成本较低,信息量丰富,但可能受到光照条件和纹理变化的影响。视觉SLAM在室内导航、增强现实(AR)、虚拟现实(VR)等领域应用广泛,代表算法有ORB-SLAM系列、vins和LSD-SLAM等。

声纳SLAM利用声波反射来探测周围环境,尤其适合水下机器人和在光线条件差或有障碍物遮挡的环境中作业。声纳SLAM面临的挑战包括声波传播速度受介质影响大、分辨率相对较低等。尽管应用不如激光和视觉SLAM普遍,但在特定领域如水下探索和救援机器人中有其独特价值。

融合SLAM结合了两种或多种传感器的数据(如视觉+激光雷达、视觉+IMU等),以充分利用各传感器的优点,同时互补各自的缺点,提高定位精度、鲁棒性和适应性。在复杂环境或对精度要求极高的场景中,如高级自动驾驶、机器人自主探索等,融合SLAM展现了其巨大潜力。例如,通过结合激光雷达的精确测距和视觉传感器的丰富纹理信息,系统可以更稳健地处理各种环境挑战。典型算法如FAST-LIVO2是一种高效的LiDAR-惯性-视觉传感器融合框架用于实时精准的SLAM任务。
每种SLAM技术都有其优势和局限性,选择合适的SLAM方案需考虑应用场景的具体需求,如成本预算、环境特性、精度要求等因素。在AR应用中受限于传感器的使用我们通常使用视觉SLAM方法。
视觉SLAM
视觉SLAM是SLAM技术的一个重要分支,它主要依赖于视觉传感器(如相机)来获取环境信息。与传统的激光雷达等传感器相比,视觉传感器具有更高的信息密度和更低的成本,因此视觉SLAM在近年来得到了广泛的研究和应用。在视觉SLAM中,机器人通过相机拍摄环境图像,并利用图像处理技术提取图像中的特征点。这些特征点可以是物体的角点、边缘等具有明显区分度的点。然后,机器人通过比较不同时刻拍摄到的图像中的特征点,计算出自己的运动轨迹和姿态变化,进而确定自己的位置。同时,机器人还可以根据这些特征点构建出周围环境的地图。
在传统SLAM(Simultaneous Localization and Mapping)技术中,几何方法占据着核心地位,它们构成了SLAM算法的基础框架。这些方法主要依赖于传感器观测数据的几何属性来进行定位和地图构建,下面将详细阐述深度学习方法在SLAM中的应用。
深度学习驱动的SLAM革新
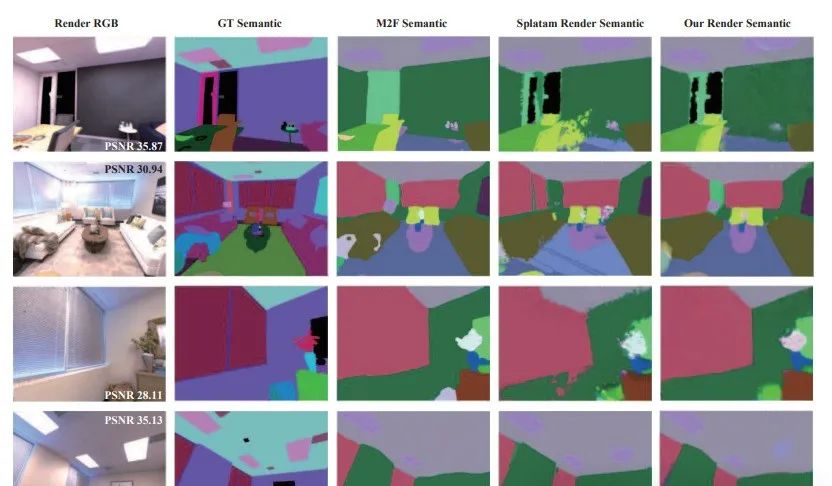
随着人工智能领域的飞速发展,深度学习技术逐渐融入SLAM(Simultaneous Localization and Mapping)的各个层面,为这一传统领域带来了前所未有的变革。深度学习如何影响SLAM的核心技术,端到端SLAM有什么最新进展。
深度学习的引入,使得SLAM系统能够更为精准地从传感器数据中提取特征,实现鲁棒性和效率的双重提升。传统SLAM依赖手工设计的特征提取器,而深度学习模型则能自动学习环境中的关键特征,减少特征匹配的错误率,提高定位精度。端到端SLAM框架,如SL-SLAM,通过深度神经网络直接从原始传感器数据中预测机器人位姿和环境地图,省去了传统SLAM中复杂的特征工程步骤,提高了系统的集成度和灵活性。
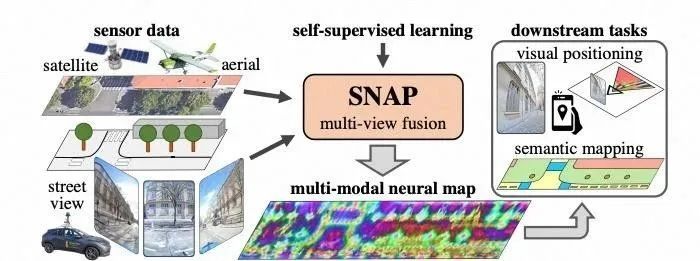
SLAM与GIS的融合:迈向环境智能感知
地理信息系统(GIS)与SLAM技术的结合,为智能系统提供了更为全面的环境感知能力。GIS擅长处理宏观地理空间数据,而SLAM则在微观尺度上构建精确的局部环境模型。两者的融合,不仅能够提供机器人更为丰富的环境信息,提升导航精度,还能够为城市规划、灾害应急等应用提供实时、动态的地理空间服务。例如,通过将SLAM生成的高精度地图与GIS中的基础地理信息叠加,可以为机器人或无人驾驶车辆提供更为详尽的导航辅助信息。

数字孪生与SLAM:构建多模态具身智能训练平台
数字孪生技术的兴起为SLAM技术开辟了新的应用领域。在数字孪生系统中,SLAM技术可以实时追踪物理实体的位置与姿态,实现虚拟与物理世界的精准同步。通过在数字孪生环境中集成物理仿真和多模态感知(如视觉、听觉、触觉),可以创建高度逼真的训练场景,使智能体在模拟环境中接受全面的训练,提升其在现实世界中的适应能力和决策质量。这种结合有助于缩短研发周期,优化智能系统的性能。
AR视角下的SLAM:增强用户体验与交互
增强现实(AR)技术与SLAM的结合,为用户提供了一种沉浸式的交互体验。在AR应用中,SLAM不仅负责实时定位与地图构建,还让用户能够通过AR设备体验到“具身智能”的第一视角,直观地理解机器人或虚拟对象的行为逻辑与决策过程。这种交互方式促进了用户对智能系统的理解与参与,推动了人机交互界面的革新,为教育、娱乐及工业培训等领域带来了新的可能性。

SLAM技术的挑战与未来展望
SLAM技术正处于一个快速发展的阶段,深度学习、多模态感知技术的融入,以及与其他先进技术的交叉融合,正不断拓宽其应用边界,推动SLAM向更智能、更高效的方向迈进。随着技术的不断成熟,SLAM将在机器人导航、自动驾驶、AR/VR等多个领域发挥更加关键的作用,为智能时代铺平道路。
GIS的未来展望,远不止局限于目前火热的高精地图与低空经济两大领域。它正逐步深化与硬件传感器的融合,通过采用更为尖端、高效的算法,不断拓展其应用范围。在汽车、机器人、无人机乃至增强现实(AR)等多端设备上,GIS正展现出前所未有的应用潜力。这种跨界融合与创新应用,不仅预示着GIS技术的深度发展,更预示着其在未来科技生态中的核心地位与无限可能。
https://mp.weixin.qq.com/s/_PIwGs9zEF5PROer4a_eTg
(图片来自网络,如有侵权,请联系作者删除)

喜欢就关注一下吧~

















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









