 扫地机自动回充技术揭秘:市场主流与功能解析
扫地机自动回充技术揭秘:市场主流与功能解析





 本文探讨了扫地机自动回充功能的重要性,指出其已成为扫地机市场的关键技术。据统计,2020年扫地机销量中,科沃斯、石头、小米和云鲸占据主导。文章介绍了自动回充的基本功能和实现原理,并预告将通过实测主流品牌扫地机的自动回充性能,深入解析这一技术,为扫地机产品的改进提供参考。
本文探讨了扫地机自动回充功能的重要性,指出其已成为扫地机市场的关键技术。据统计,2020年扫地机销量中,科沃斯、石头、小米和云鲸占据主导。文章介绍了自动回充的基本功能和实现原理,并预告将通过实测主流品牌扫地机的自动回充性能,深入解析这一技术,为扫地机产品的改进提供参考。
随着科技的发展,智能生活慢慢渗入我们周围的方方面面。生活中,打扫房间是大部分人都不愿意干的活,甚至有些夫妻为了谁打扫房间而发生争吵;可以想象,如果有一台机器人或智能设备可以解放我们的双手,帮我们省下时间时间去做其他事情,那该多好!
近几年,扫地机的兴起帮我们实现了这解放双手的愿望。依据线上购物网站统计表明:2020年家电行业销售量排在第一位的当属扫地机,其中科沃斯、石头、小米、云鲸占据了80%的市场,剩下20%由其他品牌占据。博主从事于扫地机研发工作,可以预见,扫地机正在慢慢的进入我们的生活,带给我们科技和智能的享受。
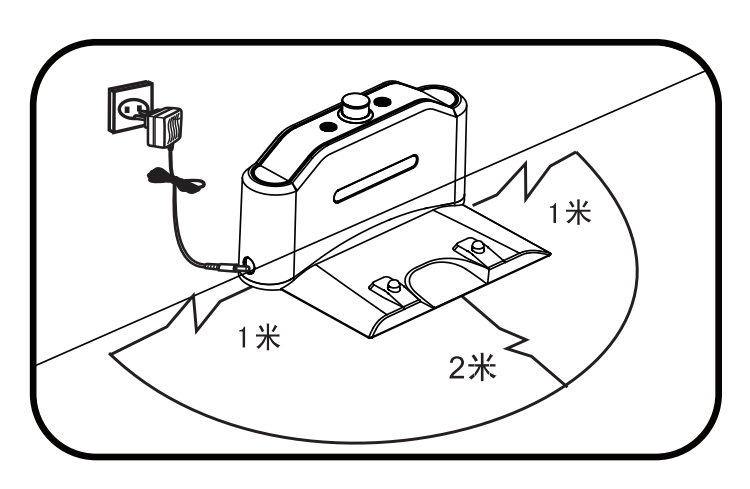
下面切入正题,目前市场上的扫地机一般具备清扫地面、拖地面、自动回充、智能避障、智能语音互动等常用功能。自动回充是扫地机非常关键功能之一,这个很容易理解,指在扫地机没电时自动回到充电座充电,或者清扫完成之后回到充电座待命,其实现的方法可以参考下面这篇博文https://blog.youkuaiyun.com/siriusmoon/article/details/103907901。讲的比较清晰,这里也上两幅比较直观的图,然后从博文中简单摘录关键的部分,方便读者查看。


相信看篇博文的伙伴们一般都是扫地机开发人员或对扫地机兴趣浓厚。对于自动回充这一功能,市场上主流扫地机都采用了什么方法,效果如何?想必伙伴们比较好奇。带着这份好奇,我做了一个决定,实测各类主流扫地机的自动回充功能,试图带着伙伴探索自动回充的原理,并了解现有扫地机自动回充方法的原理和效果。为我们完善扫地机产品提供帮助。互相鼓励鼓励!!!
专栏链接https://blog.youkuaiyun.com/jeff_ros/category_6200095.html


















 571
571

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











