






📺 B站视频讲解(Bilibili):https://www.bilibili.com/video/BV1k1C9BYEAB/
📘 《Yocto项目实战教程》京东购买链接:Yocto项目实战教程
Jetson 视频流基础全解析:从摄像头到屏幕的完整链路(V4L2 + GStreamer 实战)
本文以 NVIDIA Jetson 平台 为实例,围绕 USB 摄像头的 YUYV(RAW) 与 MJPEG(压缩) 两种典型视频流,系统讲解 Linux 下视频流的完整链路与核心原理。文章目标并非让读者成为 GStreamer 专家,而是 建立正确、工程化的视频流认知:数据从哪里来、长什么样、如何被处理、为什么会有性能差异,以及在实际项目中如何做出合理选择。
1. 什么是“视频流”?
在嵌入式 Linux / Jetson 系统中,视频流并不是抽象概念,而是一种持续输出的结构化数据流:
-
由 一帧一帧图像数据(Frame) 组成
-
每一帧都具有明确的:
- 像素格式(Pixel Format / FourCC)
- 分辨率(Width × Height)
- 帧率(FPS)
在系统层面,视频流通常遵循如下路径:
摄像头硬件 → 内核驱动(V4L2) → 用户态管线(GStreamer) → 显示 / 编码 / 推流 / AI
是否能够“稳定显示”“跑到高分辨率”“不掉帧”,本质上都由这三个核心参数共同决定。
2. V4L2:视频流的入口
2.1 /dev/video0 是什么?
在 Linux 中,大多数 USB 摄像头都会被注册为 V4L2 Video Capture 设备节点,通常表现为:
/dev/video0
需要特别理解的一点是:
/dev/video0 并不代表某一种固定的视频格式,而是一个“能力集合”。
一个 V4L2 设备节点,往往同时支持多种输出格式、分辨率和帧率组合。
2.2 使用 v4l2-ctl 查看摄像头真实能力
在实际工程中,第一步永远不是写 GStreamer pipeline,而是确认 摄像头到底支持什么:
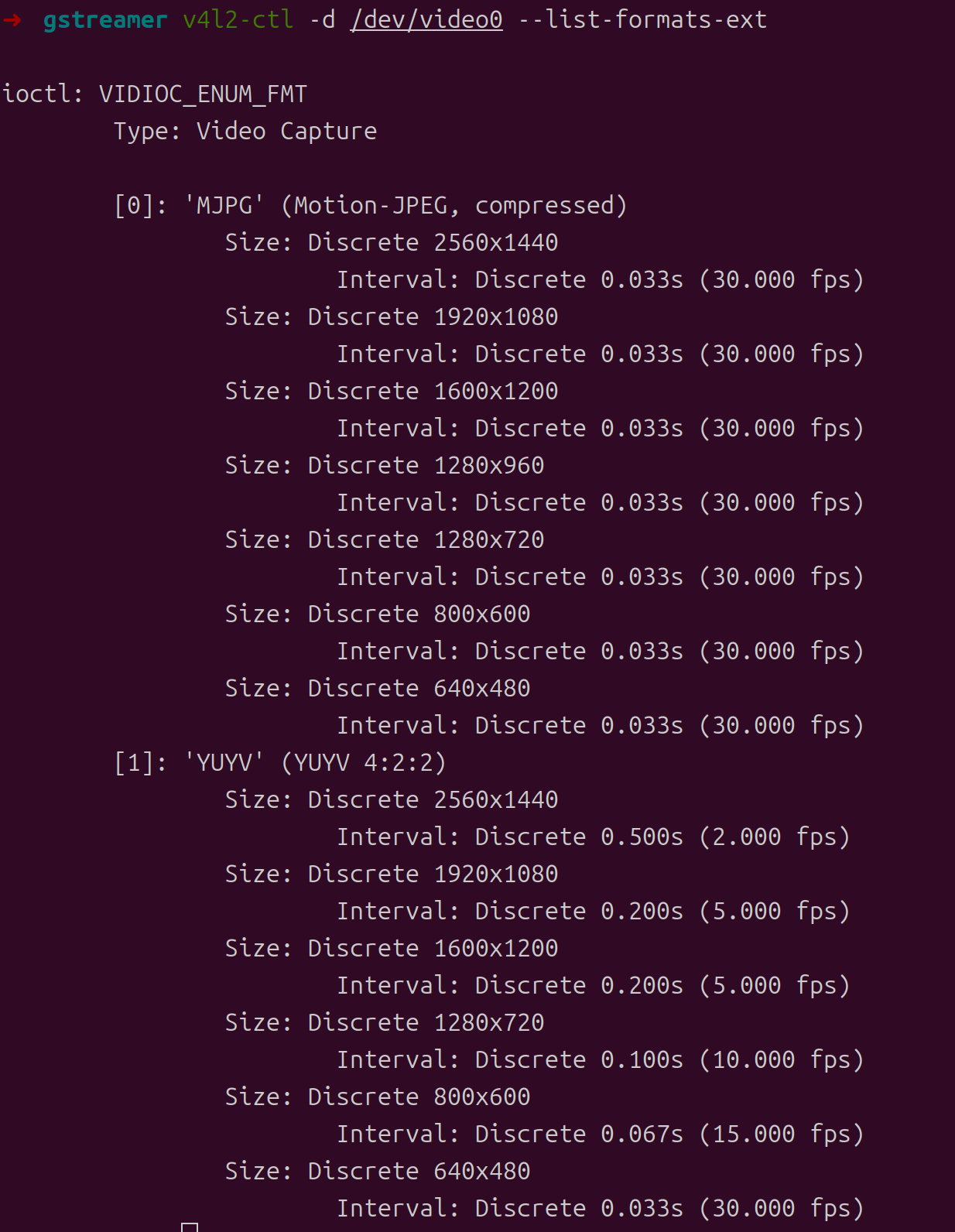
v4l2-ctl -d /dev/video0 --list-formats-ext
典型输出(示例):
-
MJPEG(Motion-JPEG, compressed)
- 2560×1440 @30fps
- 1920×1080 @30fps
- 1280×720 @30fps
-
YUYV(YUV 4:2:2, RAW)
- 640×480 @30fps
- 更高分辨率下 FPS 明显下降
这一步直接揭示了一个非常重要的事实:
同一颗摄像头,在不同像素格式下,能支持的分辨率和 FPS 是完全不同的。
3. YUYV 与 MJPEG:两种完全不同的视频流
3.1 YUYV 是什么?
YUYV(也称 YUY2)是一种未压缩的 RAW 视频格式,属于 YUV 4:2:2 采样。
特性总结:
- 每一帧直接包含像素值
- 不需要解码步骤
- 数据量大
- 链路简单、延迟低
在工程中,可以记住一句话:
YUYV = 原始像素 = 数据量大 = 分辨率受限
3.2 MJPEG 是什么?
MJPEG(Motion JPEG)是一种帧内压缩视频格式,可以理解为:
“每一帧都是一张 JPEG 图片,按时间顺序连续输出。”
特性总结:
- 摄像头内部先进行 JPEG 压缩
- 传输的数据量显著减小
- 用户态需要进行 JPEG 解码
- 更容易支持高分辨率
记忆要点:
MJPEG = 摄像头先压缩 = 数据小 = 更容易上 2K/4K
4. 为什么 RAW(YUYV)支持的分辨率反而更低?
这是初学者最容易产生疑惑的地方,但原因非常简单:
4.1 数据量决定一切
以 YUYV(4:2:2)为例,通常可以粗略按 2 bytes / pixel 估算:
-
640×480 @30fps
- 单帧 ≈ 640×480×2 ≈ 0.6 MB
- 每秒 ≈ 18 MB/s
-
2560×1440 @30fps
- 单帧 ≈ 7 MB
- 每秒 ≈ 210 MB/s
这还不包括:
- USB 传输协议开销
- 内核缓冲
- 内存拷贝
- 用户态处理
结果就是:
在 RAW 模式下,摄像头/USB/驱动往往无法承受高分辨率 + 高 FPS,只能主动降低分辨率。
而 MJPEG 在摄像头端完成压缩后,传输的数据量大幅下降,因此可以支持更高分辨率。
5. GStreamer:把视频流“接起来”
在确认摄像头能力之后,GStreamer 的角色非常清晰:
把 V4L2 输出的视频流,按指定格式接入、处理,并送到目标模块。
下面通过两条最典型的 gst-launch 实战命令,讲清楚完整链路。
6. 实战一:YUYV(RAW)视频流显示
gst-launch-1.0 v4l2src device=/dev/video0 ! \
"video/x-raw,format=YUY2,width=640,height=480,framerate=30/1" ! \
nvvidconv ! nveglglessink
6.1 Pipeline 结构解析
v4l2src → RAW(YUYV) → nvvidconv → GPU/EGL 显示
各组件职责:
- v4l2src:从 /dev/video0 拉取视频帧
- video/x-raw,format=YUY2:强制指定摄像头输出 RAW YUYV
- nvvidconv:Jetson 平台的硬件图像转换模块(常走 VIC)
- nveglglessink:基于 EGL/GLES 的硬件显示输出
6.2 工程意义
-
无解码步骤,链路最短
-
延迟低、稳定
-
非常适合:
- 摄像头驱动验证
- Pipeline 调试
- 画面是否正常的快速确认
缺点也非常明确:
受限于 RAW 数据量,分辨率无法做高。
7. 实战二:MJPEG(压缩)视频流显示
gst-launch-1.0 v4l2src device=/dev/video0 ! \
"image/jpeg,width=2560,height=1440,framerate=30/1" ! \
jpegdec ! nvvidconv ! nveglglessink
7.1 Pipeline 结构解析
v4l2src → MJPEG 压缩帧 → jpegdec → RAW → nvvidconv → GPU/EGL 显示
各组件职责:
- image/jpeg:告诉管线这是 JPEG 压缩视频流
- jpegdec:JPEG 解码(Jetson 上可使用硬件 NVJPG)
- nvvidconv:格式/颜色空间/内存转换
- nveglglessink:显示输出
7.2 工程意义
- 支持更高分辨率(如 2K@30fps)
- 更符合实际产品展示需求
- 解码步骤不可避免,但 Jetson 可利用硬件加速
8. Jetson 平台的关键特性:硬件引擎分工
Jetson 并不是“所有视频处理都跑在 GPU 上”,而是采用 多硬件引擎协作架构:
- NVJPG:JPEG 编解码引擎(MJPEG 常用)
- VIC:颜色空间转换、缩放、合成
- NVDEC / NVENC:H.264/H.265 解码与编码
- GPU(GR3D):渲染、计算
这也是为什么在很多 MJPEG 场景下:
分辨率更高,但 GPU 使用率反而不高。
因为工作被分配到了更合适的专用硬件模块。
9. 如何验证硬件引擎是否在工作?
9.1 使用 tegrastats
sudo tegrastats
关键观察项包括:
GR3D_FREQ:GPUNVJPG:JPEG 引擎VIC:图像转换引擎NVDEC / NVENC
在运行不同 pipeline 时,对比这些字段是否从 off / 0 变为活跃,是理解 Jetson 视频架构的关键一步。
10. 初学者如何在 YUYV 与 MJPEG 之间做选择?
10.1 选择原则
- 调试 / 验证 / 低延迟:优先 YUYV(低分辨率)
- 产品显示 / 录制 / 推流:优先 MJPEG(高分辨率)
- AI / 深度学习:根据后端需求(NV12/RGB),设计最短转换路径
10.2 工程思维
- 先用
v4l2-ctl看清摄像头能力 - 再用 GStreamer 选择最合适的数据形态
- 尽量减少不必要的格式转换和内存拷贝
- 用
tegrastats验证是否真正利用了 Jetson 硬件特性
11. 总结
-
视频流 = 分辨率 × FPS × 格式
-
RAW(YUYV):简单、低延迟、但数据量巨大
-
MJPEG:压缩后传输轻、支持高分辨率,但需要解码
-
Jetson 的优势:大量视频处理可由专用硬件引擎完成
-
正确学习路径:
- 用 V4L2 看能力
- 用 GStreamer 搭最短 Pipeline
- 用 tegrastats 理解硬件分工
掌握这些基础后,无论是显示、编码、推流还是 AI 处理,视频流都不再是“黑盒”,而是一个可分析、可优化、可控的工程系统。
📺 B站视频讲解(Bilibili):https://www.bilibili.com/video/BV1k1C9BYEAB/
📘 《Yocto项目实战教程》京东购买链接:Yocto项目实战教程

















 1969
1969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









