






B站视频链接,请多多关注本人B站:
📌 本博文的视频讲解
引言
随着嵌入式设备性能的提升和AI技术的进步,越来越多的开发者选择将复杂的AI模型部署在边缘设备上。本教程将引导你使用 Yocto项目构建嵌入式Linux系统,结合 TensorFlow Lite 和 SSD MobileNet量化模型,在树莓派上实现实时图像识别与抓取。
关联博文参考:
📌 基于Yocto项目与SSD MobileNet的树莓派AI视觉系统构建指南
📌 树莓派使用USB摄像头与TFLite实现目标检测的完整指南
一、硬件与软件环境
硬件要求
-
树莓派4B(推荐4GB内存版本)
-
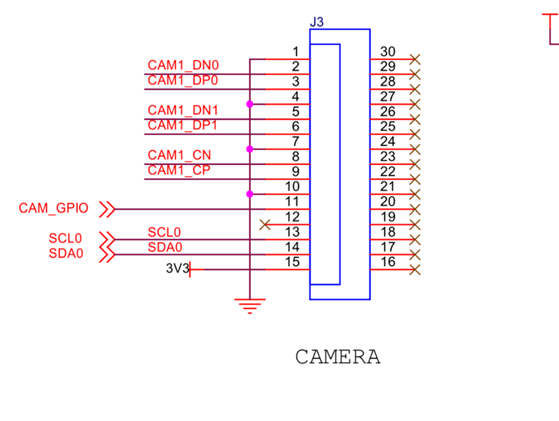
USB摄像头(支持UVC协议,如罗技C920)或 CSI摄像头模组
-
HDMI显示器(推荐1920x1080分辨率)
-
MicroSD卡(16GB以上,建议Class 10高速卡)
软件环境
- Yocto Project(Poky nanbield分支)
- TensorFlow Lite Runtime(集成XNNPACK加速库)
- V4L2驱动框架(摄像头控制)
- OpenCV 4.5+(图像处理与显示)
- SSD MobileNet量化模型(INT8版本)
二、Yocto项目环境搭建
关键步骤
- 克隆Yocto nanbield分支
git clone -b nanbield git://git.yoctoproject.org/poky - 添加必要的meta层
meta-raspberrypi(树莓派硬件支持)meta-tensorflow(TensorFlow Lite集成)meta-openembedded(OpenCV依赖)
- 配置镜像配方
在build/conf/local.conf中添加:IMAGE_INSTALL:append = " tensorflow-lite python3-opencv v4l-utils"
三、树莓派图像采集与处理
1. USB摄像头识别与V4L2框架
-
检查摄像头设备节点:
v4l2-ctl --list-devices
-
CSI摄像头驱动加载:
sudo modprobe bcm2835-unicam sudo i2cdetect -y 0
2. OpenCV捕获与分辨率适配
import cv2
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
while True:
ret, frame = cap.read()
if not ret:
break
cv2.imshow("Preview", frame)
if cv2.waitKey(1) == ord('q'):
break
cap.release()

四、TensorFlow Lite模型加载与推理
1. 加载模型并启用加速
import tflite_runtime.interpreter as tflite
interpreter = tflite.Interpreter(
model_path="detect.tflite",
experimental_delegates=[tflite.load_delegate('libXNNPACK.so')]
)
interpreter.allocate_tensors()
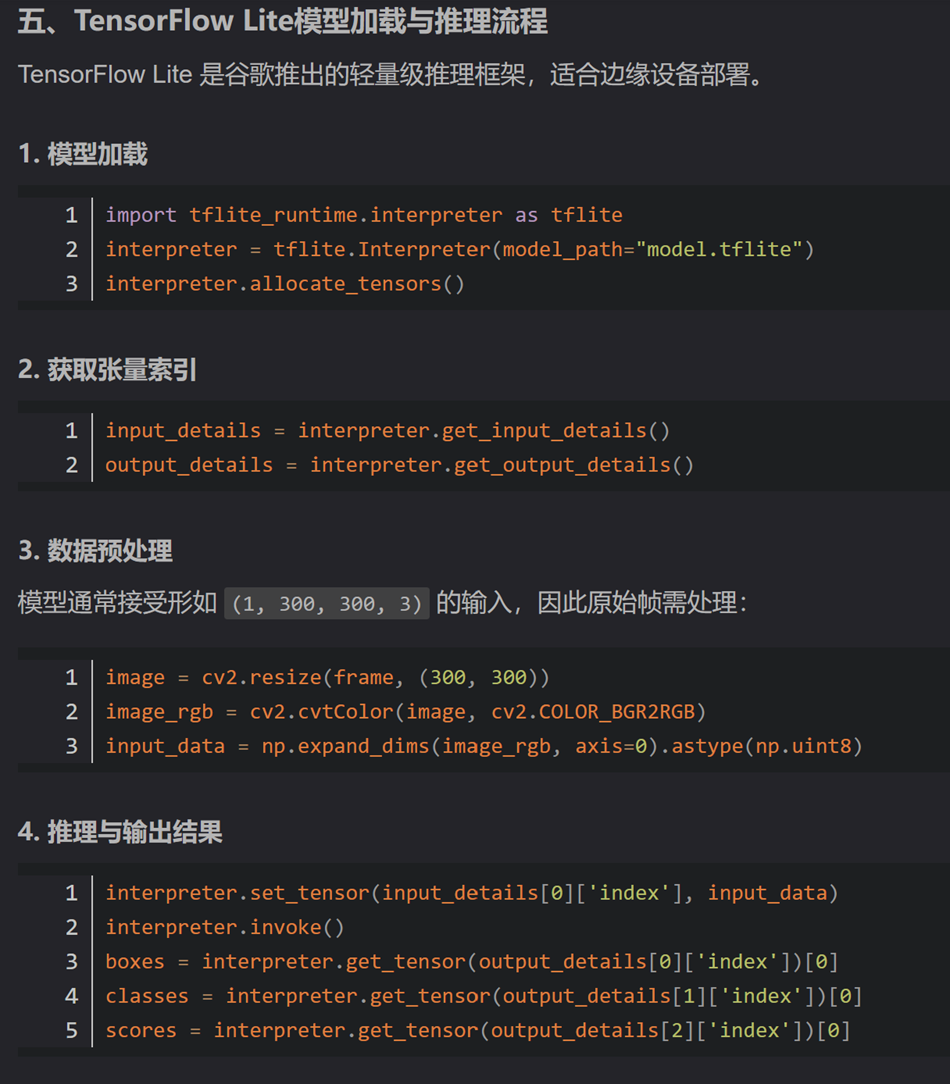
2. 推理结果后处理
# 绘制检测框(置信度>0.5)
for detection in detections:
if detection['score'] > 0.5:
xmin, ymin, xmax, ymax = detection['bbox']
cv2.rectangle(frame, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
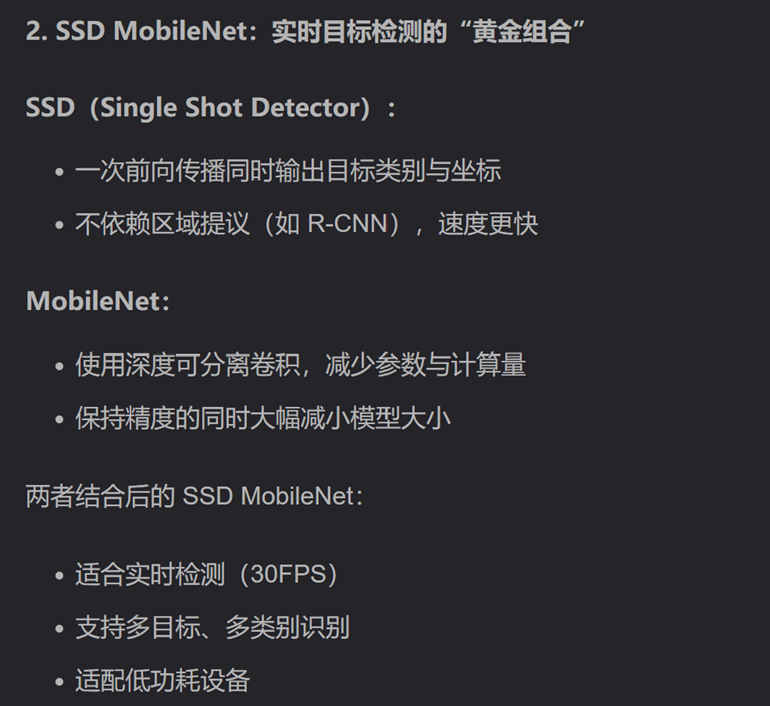
五、SSD MobileNet量化模型解析
模型文件结构
tflite_models/
├── detect.tflite # 量化模型文件
├── coco_labels.txt # COCO数据集标签
└── tflite_camera.py # 推理脚本示例
六、实时目标检测效果展示
默认分辨率(720P)

1080P高清适配
frame_resized = cv2.resize(frame, (1920, 1080))

七、常见问题与排查方法
1. 摄像头无法识别
- 硬件检查:
- 确认USB供电充足(推荐使用5V/3A电源)
- CSI摄像头排线方向正确(金手指朝HDMI接口)
- 驱动加载:
sudo modprobe uvcvideo # USB摄像头 sudo modprobe bcm2835-unicam # CSI摄像头
2. 模型推理速度优化
- 启用Edge TPU加速:
delegates = [tflite.load_delegate('libedgetpu.so.1')] - 超频配置(需谨慎):
# /boot/config.txt over_voltage=2 arm_freq=1800
3. 分辨率适配冲突
- 动态分辨率适配:
actual_width = cap.get(cv2.CAP_PROP_FRAME_WIDTH) if actual_width < 1920: frame = cv2.resize(frame, (1920, 1080))
结语
通过本教程,你已掌握 Yocto定制系统构建 到 AI模型部署 的全流程。关键优化点包括:
- 使用XNNPACK和Edge TPU双加速
- 动态分辨率适配逻辑
- 摄像头驱动深度调试
扩展方向:
- 集成MQTT实现云端数据上报
- 多线程优化提升帧率稳定性


















 2995
2995

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









