




 本文详细介绍了嵌入式系统中定时器(TIM)的多种工作模式,包括输入捕获、输出PWM、双通道输入捕获及PWM输入模式,并探讨了LCD显示、延迟、SysTick、外部中断(EXTI)、实时钟(RTC)、E2PROM存储以及中位值滤波等关键技术。特别关注了TIM在不同模式下的应用细节,如PWM频率与占空比调节。
本文详细介绍了嵌入式系统中定时器(TIM)的多种工作模式,包括输入捕获、输出PWM、双通道输入捕获及PWM输入模式,并探讨了LCD显示、延迟、SysTick、外部中断(EXTI)、实时钟(RTC)、E2PROM存储以及中位值滤波等关键技术。特别关注了TIM在不同模式下的应用细节,如PWM频率与占空比调节。
文章目录
2.1.7、TIM?
2.1.7.1、输入捕获
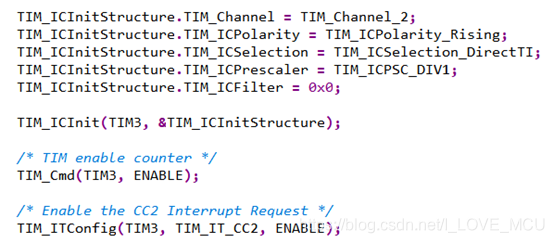
需要手动加上定时器初始化函数
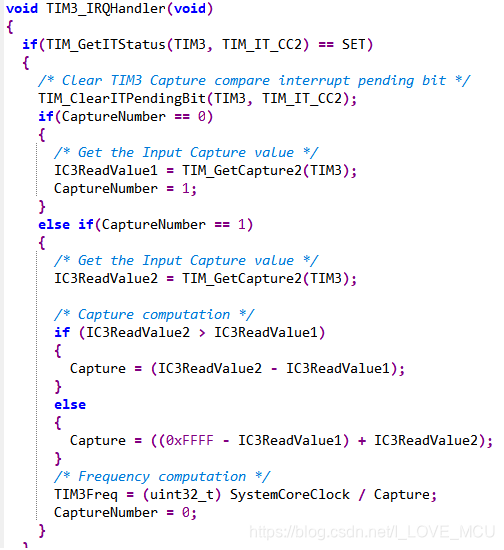
该代码的最低测量频率为1KHz,但分频后就可以通用。
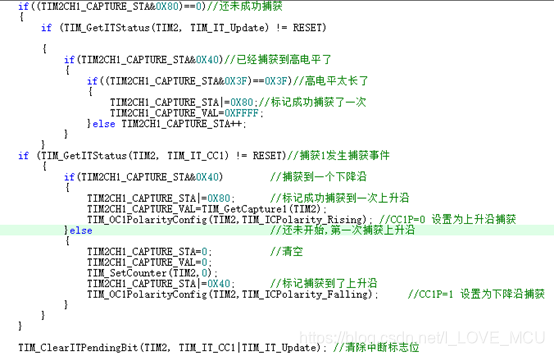
正点原子中断服务函数,测量高电平持续时间
TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
占空比不能测量
2.1.7.2、输出PWM
3.5库->pwm_output
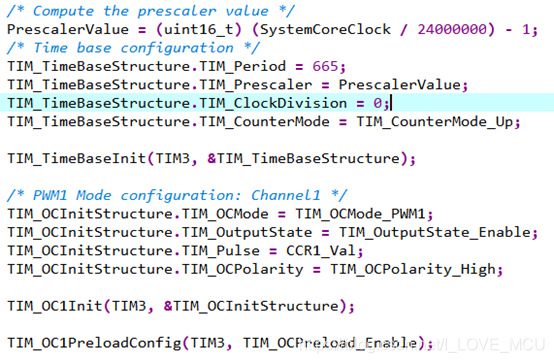

频率不可调
2.1.7.3、?双通道输入捕获
猜测打开两路通道即可
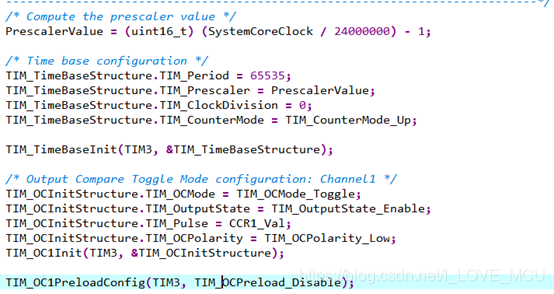
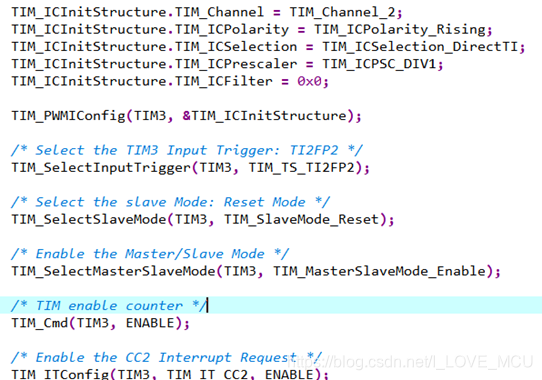
2.1.7.4、双通道pwm频率占空比可调
3.5->TIMOCToggle


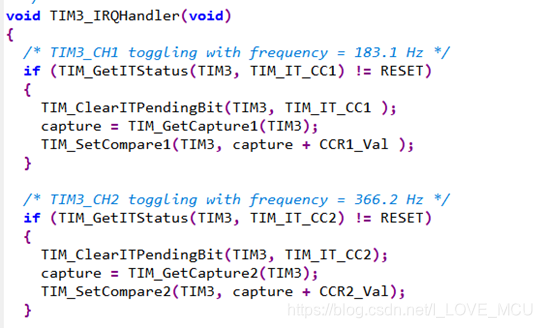
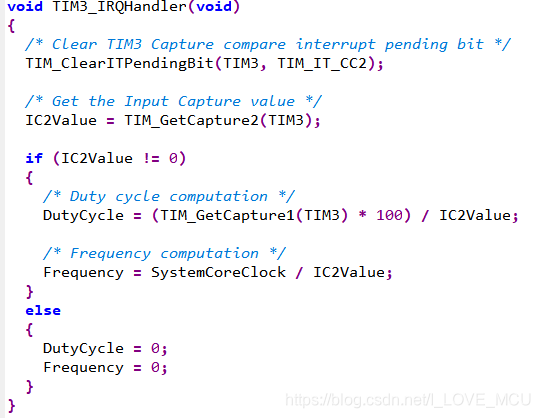
中断服务函数
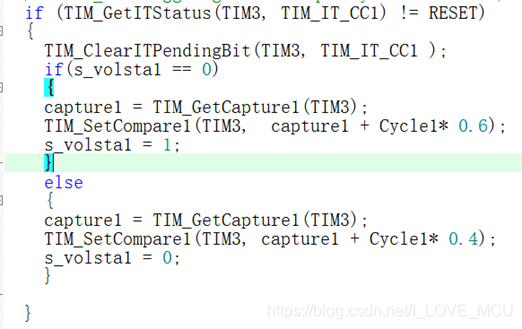
具体实现代码
2.1.7.5、PWM输入模式
3.5库->TIM->PWM_Input
2.1.8、LCD
对输出字符进行封装

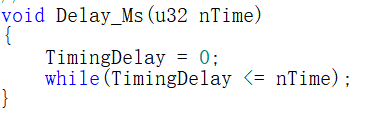
2.1.9、Delay
防止延时函数溢出
2.1.10、SysTick
初始化
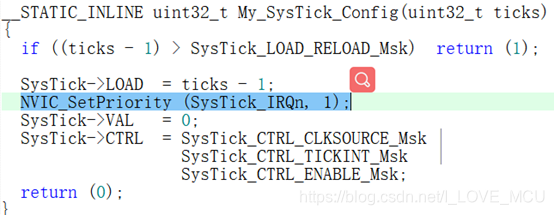
我们需要把它修改为NVIC_SetPriority (SysTick_IRQn, 1);抢占优先级为1(只要比按键的中断优先级高即可)
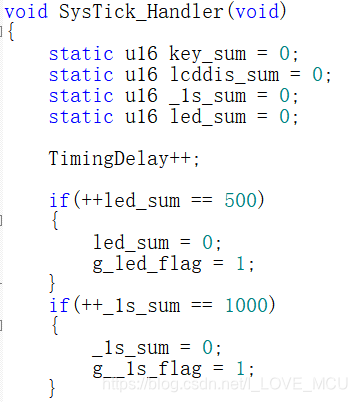
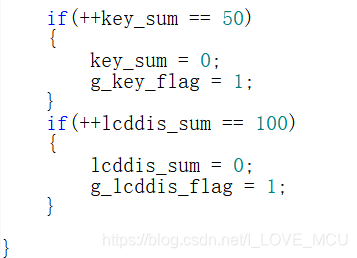
使用systick置标志位,主函数刷新到标志位就执行操作
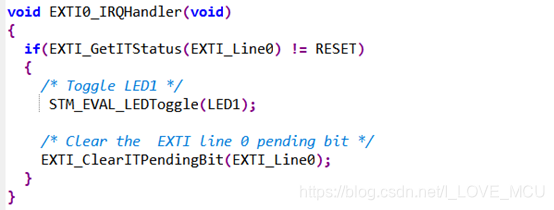
2.1.11、EXTI?
3.5库
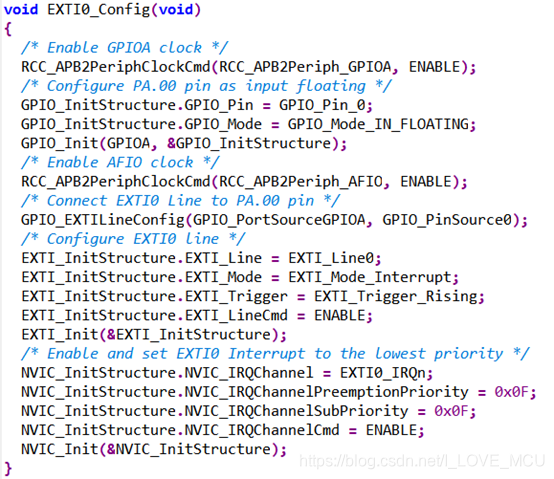
记得使用时开启复用时钟
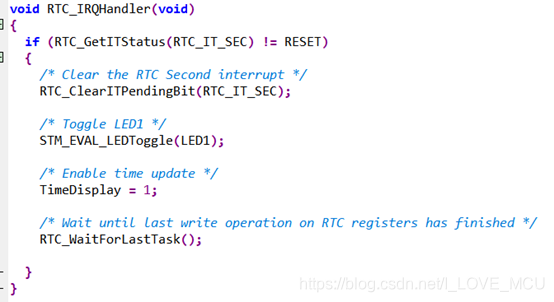
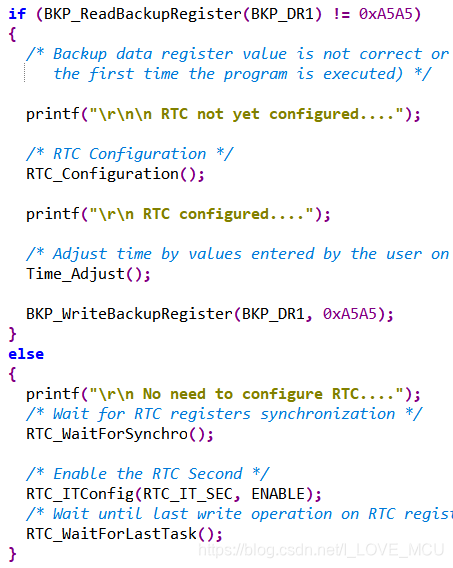
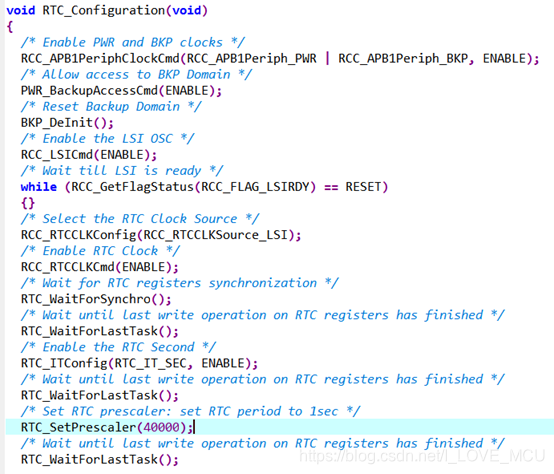
2.1.12、RTC
3.5库->RTC->calendar主体部分、中断部分
3.5库->RTC->Lsi初始化
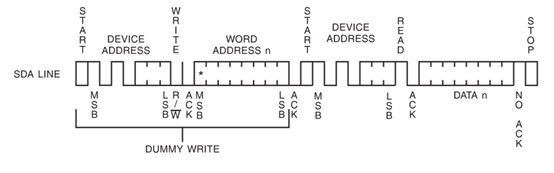
2.1.13、E2PROM
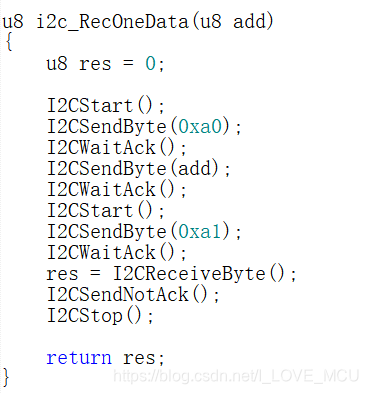
对IIC协议封装出E2prom的读写协议
读操作
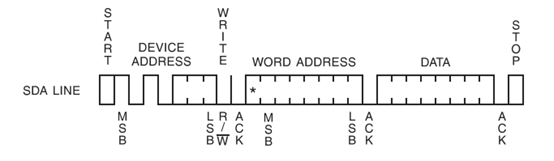
写操作
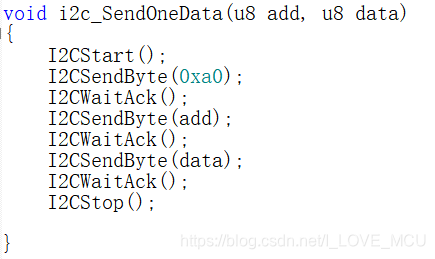
EEPROM的读写较慢,需要延时,根据数据手册10ms即可。
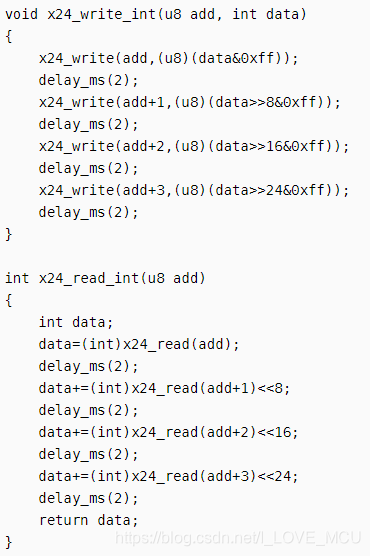
e2prom读写u32
读写float时,可以
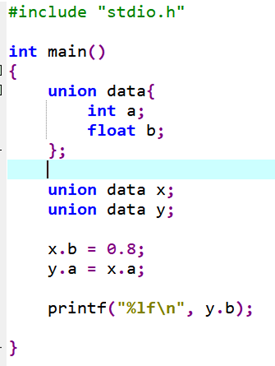
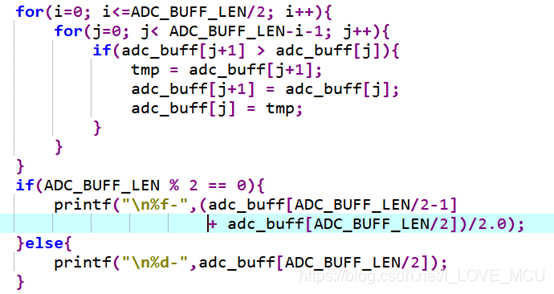
2.1.14、中位值滤波

















 5017
5017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









