




Day14:CIE一级2022.06_报时的公鸡
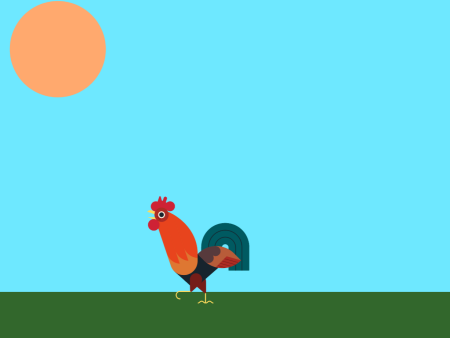
故事背景:公鸡在黎明时分会打鸣迎接太阳升起,古人也将鸡鸣声当做晨起的“闹钟”。
1. 准备工作
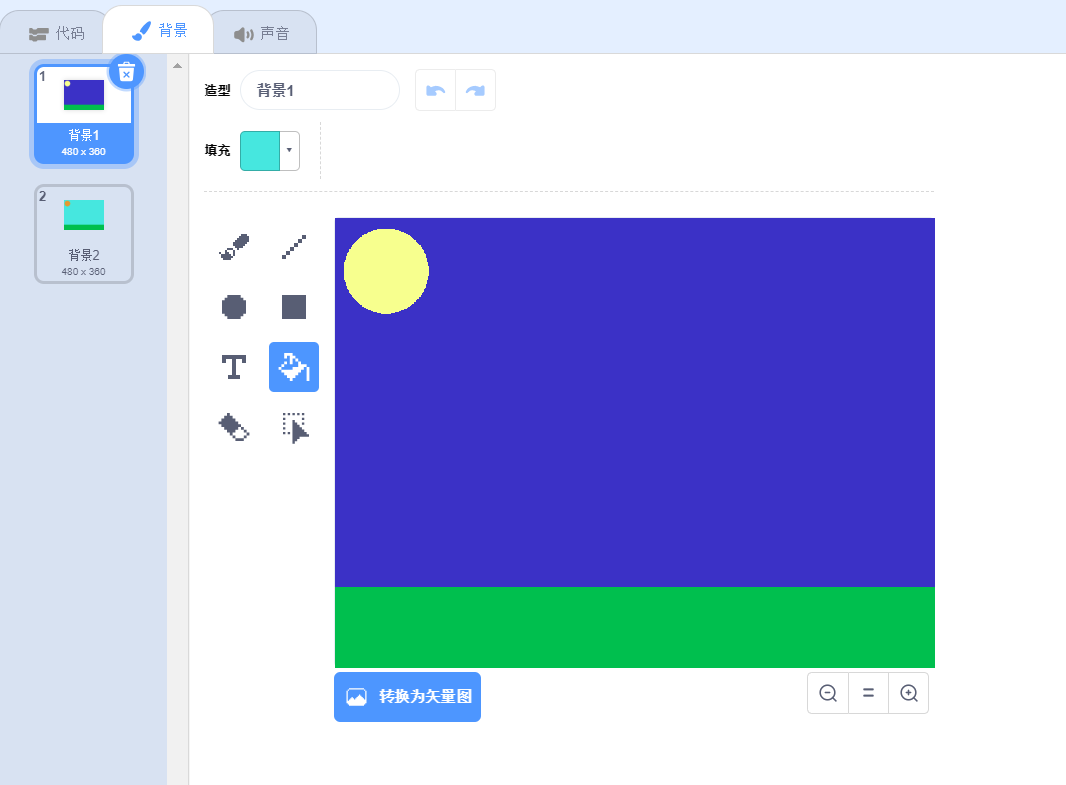
(1)背景:根据下图绘制两张背景;

01

02
(2)删除默认角色,添加角色Rooster。

2. 功能实现
(1)点击小绿旗,角色Rooster初始化位置、大小,位于舞台左侧,面向右侧,造型为“rooster-a”,背景为“背景1”;

(2)点击角色Rooster,Rooster从舞台左侧走到右侧,再从右侧走到中间;(注意走的过程中脚不能朝上,并且朝哪个方向走Rooster就面朝哪里)
(3)走完后,切换成造型“rooster-b”,播放声音“rooster”,声音播完后,切换背景为“背景2”。
3. 设计思路与实现
(1)角色、舞台背景设置
a. 角色设置
删除默认角色,添加角色Rooster。

b. 舞台背景设置
按照题目要求,绘制两张背景,如下图所示。

绘制背景

(2)脚本编写
编程题的功能实现有多种方案,标准答案所示参考程序仅是其中的一种,最终以是否完成题目要求的功能实现效果作为评分依据。
a. 角色:Rooster

当绿旗被点击时:
-
开始:点击绿旗,也就是程序启动,就要执行后续的程序指令。
-
初始位置:X=-213,Y=-73。(位于舞台左侧)
-
初始方向:90°。(面向右侧)
-
初始旋转方式:左右翻转。(注意走的过程中脚不能朝上,并且朝哪个方向走Rooster就面朝哪里)
-
初始造型:rooster-a。(造型为“rooster-a”)
-
初始大小:90。(角色Rooster初始化位置、大小)
-
初始背景:背景1。(背景为“背景1”)

当角色被点击时:
-
重复执行50次:(Rooster从舞台左侧走到右侧,再从右侧走到中间)
-
移动10步
-
碰到边缘就反弹
-
-
换成rooster-b造型。(走完后,切换成造型“rooster-b”)
-
播放声音rooster等待播完。(播放声音“rooster”)
-
换成背景2。(声音播完后,切换背景为“背景2”)


















 1182
1182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











