



 文章讲述了中海达作为国内卫星导航行业的领头羊,如何利用北斗技术和多元技术提供全面的应急指挥通信、救援装备及监测预警解决方案,以解决应急通信难题、监测二次灾害并提升灾区实况掌握能力。
文章讲述了中海达作为国内卫星导航行业的领头羊,如何利用北斗技术和多元技术提供全面的应急指挥通信、救援装备及监测预警解决方案,以解决应急通信难题、监测二次灾害并提升灾区实况掌握能力。
近日,应急管理部印发《自然灾害应急能力提升工程基层防灾、预警指挥、航空应急等3个项目实施方案》及《地方应急管理信息化2024年任务书》等文件,要求根据本地区自然灾害发生特点和预防应急处置需求,聚焦难点痛点堵点精准发力,有效补齐数据互联共享、监测预警、应急指挥、通信保障、航空救援、基层响应、工程抢险等方面突出短板。
作为国内高精度卫星导航产业的龙头企业,中海达为应急救援与指挥保障提供应急指挥通信、水域救援、抗洪抢险、地震地质灾害救援、三维态势感知、应急综合保障等产品和应用解决方案,助力应急管理综合能力提升。
一、应用痛点
1.应急通信难保障
“断路、断电、断网”极端恶劣情况下,无法及时掌握灾区现场实时状况。
2.二次灾害难监测
针对应急救援过程中的二次灾害,缺乏快速部署、实时在线的监测手段。
3.灾区实况难掌握
灾区现场状况难以及时获取,救援指挥决策难度大。
二、解决方案
以北斗卫星导航定位技术为基础,融合无人机、无人船、机器人、激光雷达、倾斜摄影、单/多波束、声呐等技术,面向应急通信与预警指挥、水域救援、应急测流、抗洪抢险、地质灾害救援等应急场景提供水陆空天一体化应用的整体解决方案。

三、方案优势
1.应急通信全覆盖:4G/5G、数字对讲、北斗短报文、卫星电话多种保底通信手段互为补充,保障灾区现场通信“连得上、呼得通、听得见”。
2.实时监测预警:基于边坡雷达与三维态势感知装备,采集灾害现场感知信息,实现灾害现场风险分析与监测预警能力提升。
3.水陆空天一体化:通过北斗终端、侦测雷达、救援无人机、无人船、机器人等应急装备,实现水陆空天一体化应急感知与救援。
4.本地化服务:在全国各省份设有26家分公司,具备专业、高效的演示、演练、支撑、交付等本地化服务能力。专业技术团队、7*24小时应急响应,为应急安全提供专业化解决方案。
四、产品组合
1. 应急指挥通信装备

▲应急指挥通信融合终端
•应急通信:支持4/5G、PDT、短报文、卫星通话等多种通讯模式
•北斗定位:支持单北斗定位,3~5米定位精度
•三防+防爆:安全防护等级IP67,抗1.2米自由跌落,本安防爆设计
•小巧便携:4.1英寸户外高清屏,单手可握易携带
应用场景:野外应急通信、灾害点巡查、应急救援、人员定位、指挥调度
2. 水域救援装备
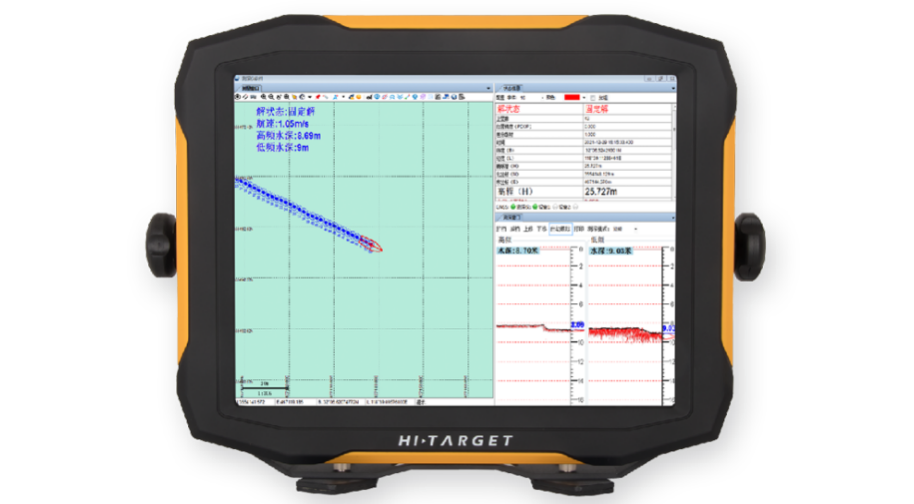
▲水深探测仪
•集成高配置工控机平台,采用Windows7操作系统
•内置Hi-MAX测深仪软件,集控制、数据采集、导航、后处理于一体
•自动控制发射功率、增益及信号门槛,实现测深操作自动化
•水深模拟信号和数字信号叠加,快速精准判读水深
•15英寸高亮度液晶屏、重量仅5.8kg
应用场景:水文勘察、航道码头、应急测深

▲流速监测仪
•测流精度高达0.25%±0.2cm/s
•支持RS232、RS485以及WiFi数据传输方式,可以通过无线方式进行设备连接以及数据传输,有效距离20米
•支持走航测量模式、定点测流模式、自容模式以及DVL模式
•采用低功耗技术,平均功率仅3.2W
应用场景:应急测流、海洋工程、航道系统、水下导航、国防安全
3. 抗洪抢险装备

▲无人侦测船
•开机即测:无需岸基,无需电脑,一键连接,开机即可测
•搭载喊话模块、摄像头、测深仪、超声波避障。满足灾害水面巡航、检测、采样,获取灾害信息等
•安卓平台:配备Hi-Survey Boat安卓测深、测流、船控三合一软件
•绝对直线:流速自适应,船速接近流速,保证往返测线绝对直线
应用场景:水文测验、应急救援、水下地形测绘、库容测量、水下考古和环境救援

▲水下搜救机器人
•4K摄像,1200万像素
•潜深150米
•多功能模组负载
•20.5kg,灵活机动,可单兵作业
•水下360°任意姿态航行及悬停
应用场景:水下搜救、桥梁检测、水下管道检测、船舶保养

▲侧扫声呐
•CHIRP & CW工作模式可在线切换,抗干扰强、分辨力高、扫测量程大
•0.3°波束宽度和1.25cm的距离分辨力,可以分辨细小目标物
•采用316不锈钢壳体,流体学设计,较小水流阻力
•采用收发基元分置技术,最大化提供系统收发灵敏度;采用最新的L1-3复合材料工艺技术,提升收发灵敏度和信号带宽
应用场景:人员搜救、地形地貌调查、渔业栖息地调查、路由管线调查、失事船只飞机汽车探寻打捞
4. 地震地质灾害救援装备
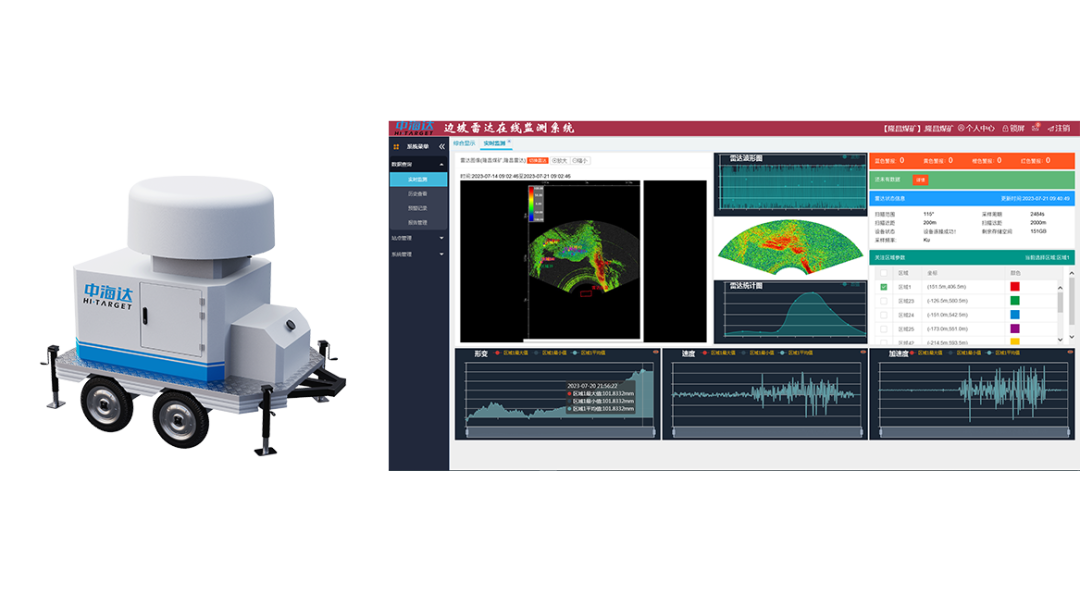
▲侦测雷达+监测云平台
•全方位扫描:支持360°全方位扫描,适应“两山夹一沟”山区及大型矿区等场景应用
•快速/精度高:形变更新速度快,远距离、高形变测量精度
•快部署:整车标配监测需求全系统配置,可实现机动拖行、快速部署、即时监测
•环境适应性强:全天时全天候工作;防水抗震抗强风,耐极端高低温,可支持野外恶劣环境
应用场景:地质灾害监测、滑坡监测、边坡监测、崩塌滚石监测、应急监测
5. 三维态势感知装备

▲D10三维态势感知系统
•长航时六旋翼无人机,载重≥5kg;标准负载飞行60分钟
•传输带宽≥100M,传输距离≥5km
•夜视变焦相机图像传感器:1/1.8"超星光级CMOS
•激光雷达测量精度≤高程5cm,平面10cm;测程≥300m
•三维采集模块相机像素≥4200万像素,传感器尺寸≥35.9x24.0mm,焦距≤18mm,具有2轴增稳结构,内置独立IMU进行姿态测算,支持正射和扫摆两种作业模式
应用场景:用于地震灾害、洪涝灾害、火情灾害的灾情态势实时获取
6. 综合保障装备

▲测流无人机
•雷达测速/水位:有效排除与水面流速无关的干扰信号,测量水面流速/水位
•稳定可靠:最大飞行时间55分钟,可抗七级风,在中大雨中飞行
•实时监测:实时监测水流速度
•智能航线/避障:精准测量、断点续飞及自动避障功能,保障飞行安全
应用场景:用于洪水灾害高流速下的水体流速、流量测量

▲灭火无人机
•载重能力≥30kg
•遥控距离:≥10km;遥控器屏幕尺寸:≥5.5寸
•最大可承受风速: 14 m/s
•抛投挂点:≥2个,单个灭火弹重量≥4kg,单个灭火弹灭火面积≥9m³
•水枪长度≥1.8米,配套专用无人机专用水带,水带长度≥100米
应用场景:森林防火、高层灭火

▲照明无人机
•载重能力≥5kg
•遥控距离:≥10km;遥控器屏幕尺寸:≥5.5寸
•抗风等级≥5级
•系留模式下滞空时间≥24h
•地面端输出功率≥3000W;自动收放线功能:根据线缆拉力,自动控制收线或放线
•水枪长度≥1.8米,配套专用无人机专用水带,水带长度≥100米
•升空照明功率≥500w;光通量12万流明
应用场景:山林搜救、消防侦查、大型会议监控、救援照明
五、应用场景
1. 灾害现场通信保障

2. 应急测流

3. 应急救援照明保障

4. 灾害现场实时感知

5. 地震地质灾害救援

六、应用案例

2020年全程助力珠峰高程测量

2018年联合国“一带一路”科技减灾项目

2024年长委中游局水文应急演练

2023年应急使命地震救援演习
2022年东航事件应急监测预警

2021年汕头应急管理综合指挥平台建设

2020年云南金沙江沿岸边坡应急监测

2020年贵州地质灾害监测预警项目

















 5269
5269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









