



 本文介绍了在广西某山区林地进行的地形测量项目,通过大疆无人机搭载中海达轻小型机载激光测量系统,克服了传统测量的困难,实现了高精度、低破坏性的数据采集,显著提高了作业效率和成果质量。
本文介绍了在广西某山区林地进行的地形测量项目,通过大疆无人机搭载中海达轻小型机载激光测量系统,克服了传统测量的困难,实现了高精度、低破坏性的数据采集,显著提高了作业效率和成果质量。

林业作为维护生态平衡和保护环境的关键领域,其科学管理和合理利用是当前林业工作的重中之重。林业调查旨在全面了解当前林业资源的状况,其中林地地形测量是林业调查的基础工作。通过对林地地形的准确测量,可获取森林的地理位置、面积、地貌、植被分布等详细信息,为制定科学的林业规划和管理方案提供基础数据。
一、项目背景
项目位于广西某产业园附近的山区林地,总共面积1km²,该林地植被茂密,测区环境如下图。业主要求采集贴近园区的小片林地地形数据,用于后续园区规划。

二、痛点分析
该项目所在林地多灌木,大部分区域人员无法直接进入,以致需人携带进入的常规测量设备无法使用。
三、实施方案
根据地形特点,采用大疆M350无人机搭载中海达轻小型机载激光测量系统,可减少对林地植被的直接接触和破坏,快速有效获取高精度的地形数据。
中海达轻小型机载激光测量系统
1. 大疆伴侣完美适配,转动半圈就搞定,像装相机一样简单。
2. 具有360°视场角,扫描幅宽大,重叠率要求低,无需像控点,外业效率高。
3. Hi-LiDAR 后处理软件。轨迹解算、数据融合、点云优化、质量检查、DEM精编、等高线制作、断面等功能一键处理,降低80%人工操作,一平方半小时即可出点云模型,内业作业更加简单、高效。
4. 具有良好的植被穿透性,可有效获取植被以下的地形数据,是目前山区林地地形测量最有效的方式。
5. 航空摄影相机,HD画质表现。2600W超高分辨率,轻松获得高质量彩色点云和正射影像成果。
四、作业过程
1.现场勘测与准备
在开始测量之前,需要对测量区域进行现场勘测,了解地形的特点、障碍物的分布等。同时,准备好激光雷达设备,并确定测量的区域和目标。选择合适的测量区域和分辨率,以满足测量的需求。
航线规划情况:
采用WPM自动规划仿地航线,规划时间三分钟内,设置航高:100米,航速:8m/s,重叠率40%,航线总计长度为12km,航线时间25分钟,采用一个架次飞完。

▲航线规划界面
2.机载激光扫描测量
将激光雷达设备安装在无人机上,并确保设备的稳定性。启动设备后,进行设备的校准和标定工作,包括仰角、方位角以及水平度的调整。校准完成后,无人机开始按照预设的航线进行飞行。在测量过程中,确保无人机能够覆盖整个测量区域,并根据需要调整飞行高度和速度。

3.数据处理
测量完成后,将激光雷达设备采集的原始点云数据导入到计算机中。使用中海达Hi-LiDAR点云处理软件对数据进行滤波和分类后对数据进行三维重建,生成地形表面的三维模型。
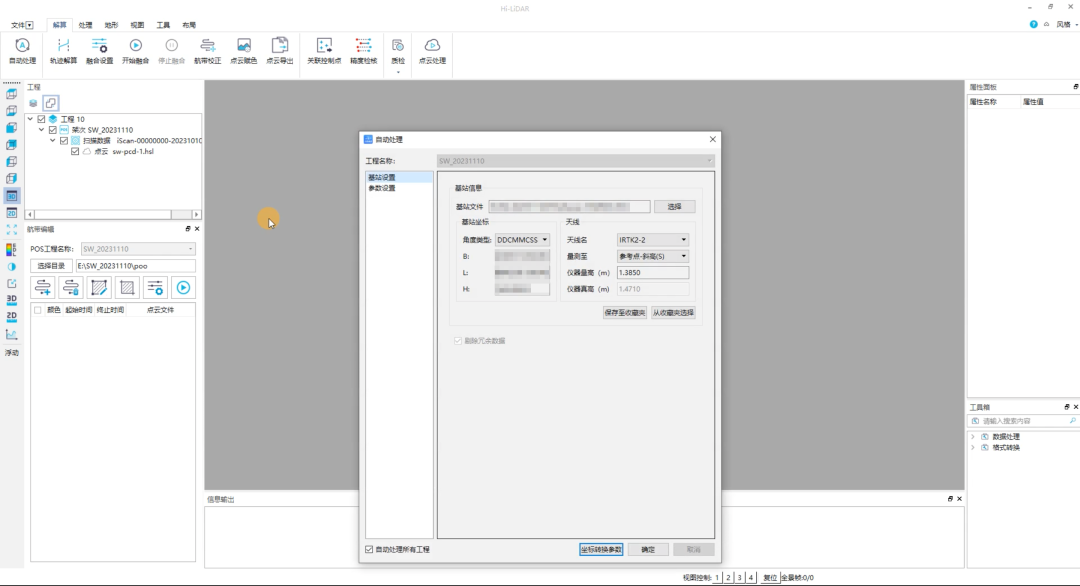
数据解算流程:
选择采集的工程文件,点击点云解算,即可解算出点云数据,无需单独解算pos轨迹和输入杆臂值等各类参数。
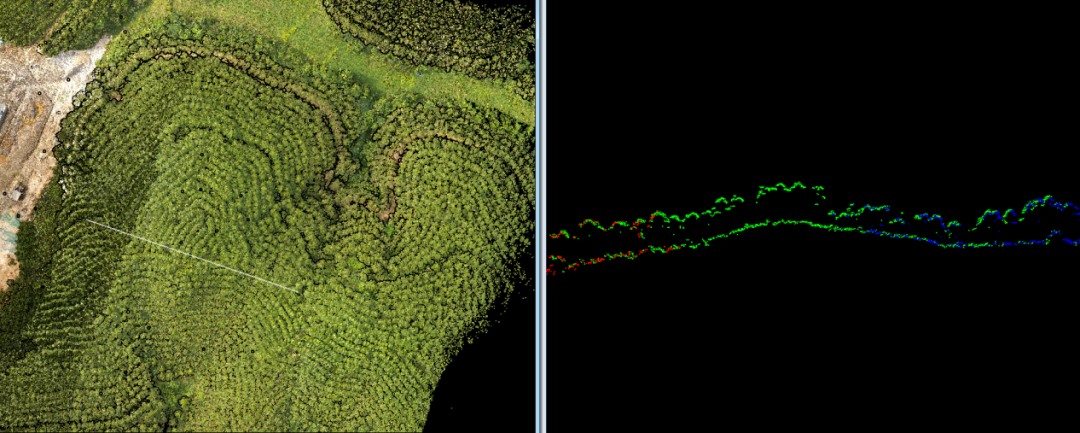
4.点云质量检查
1. 赋色效果良好,赋色与点云完全匹配,能够清晰分辨出地物和地类边界。
2. 不同航带的点云匹配效果良好,点云厚度约3cm。
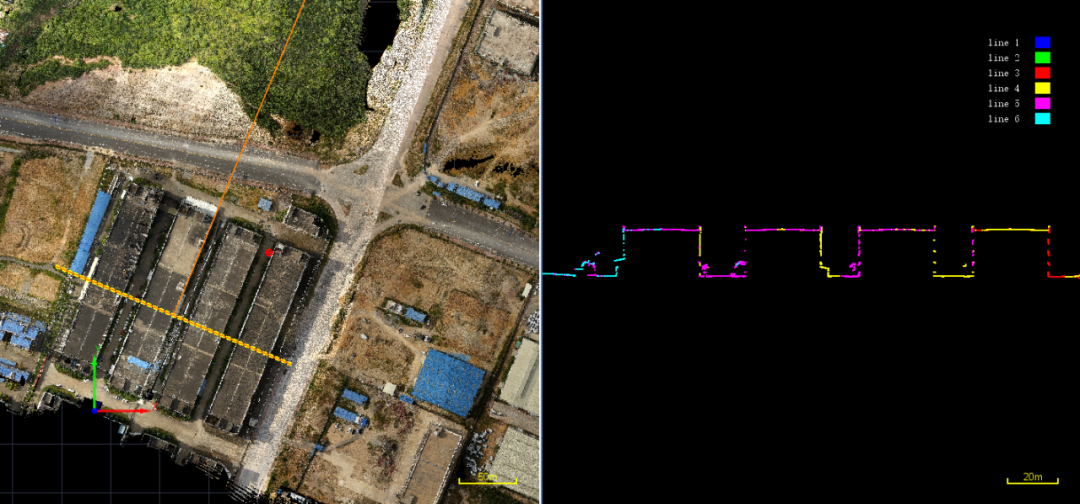
3. 植被区域树下穿透效果好,树底下点多且连续,细致表达地形起伏。
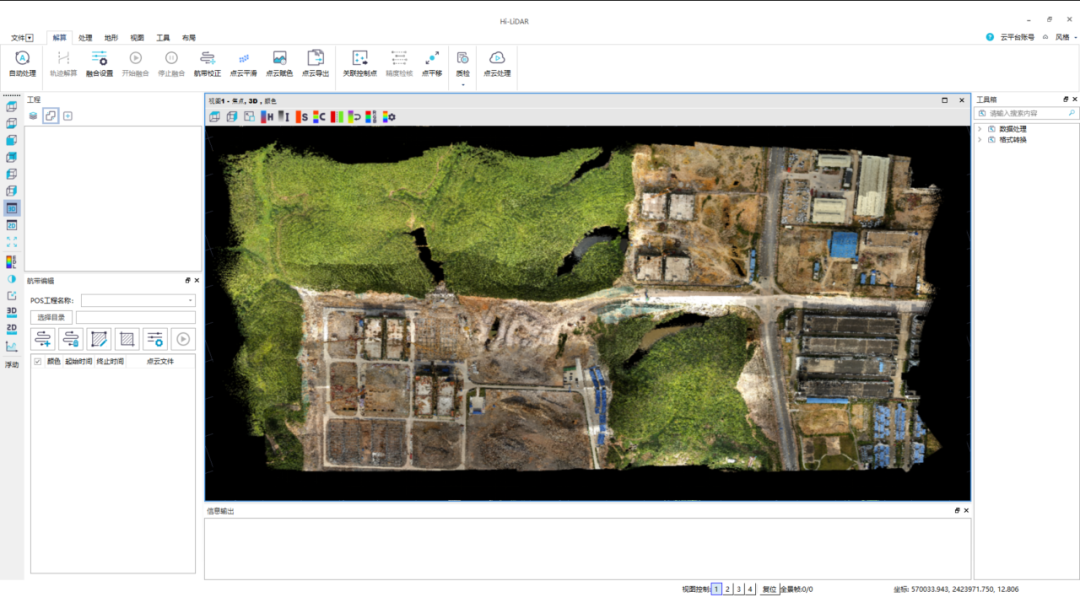
五、成果展示
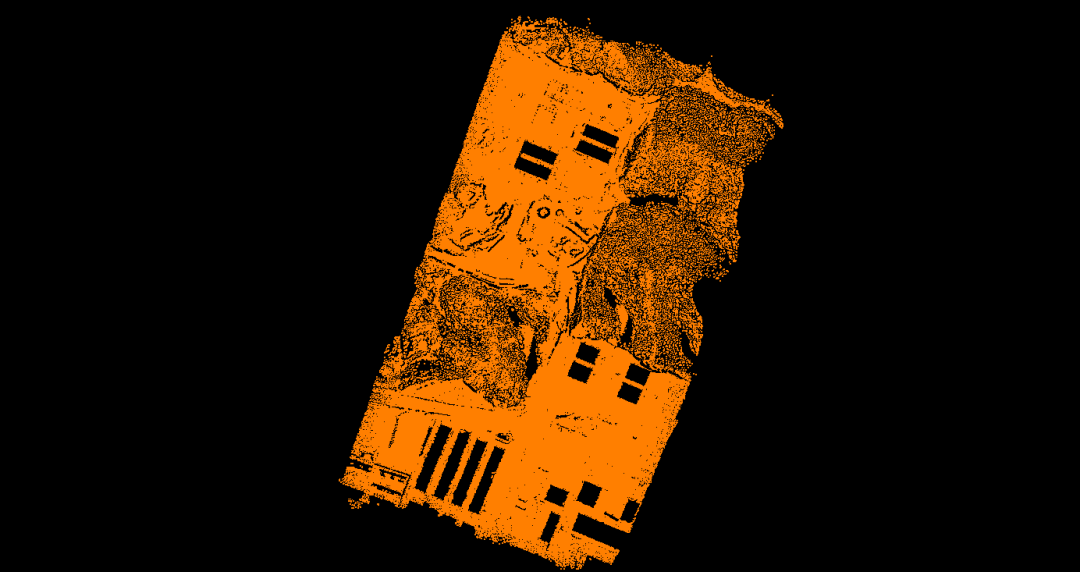
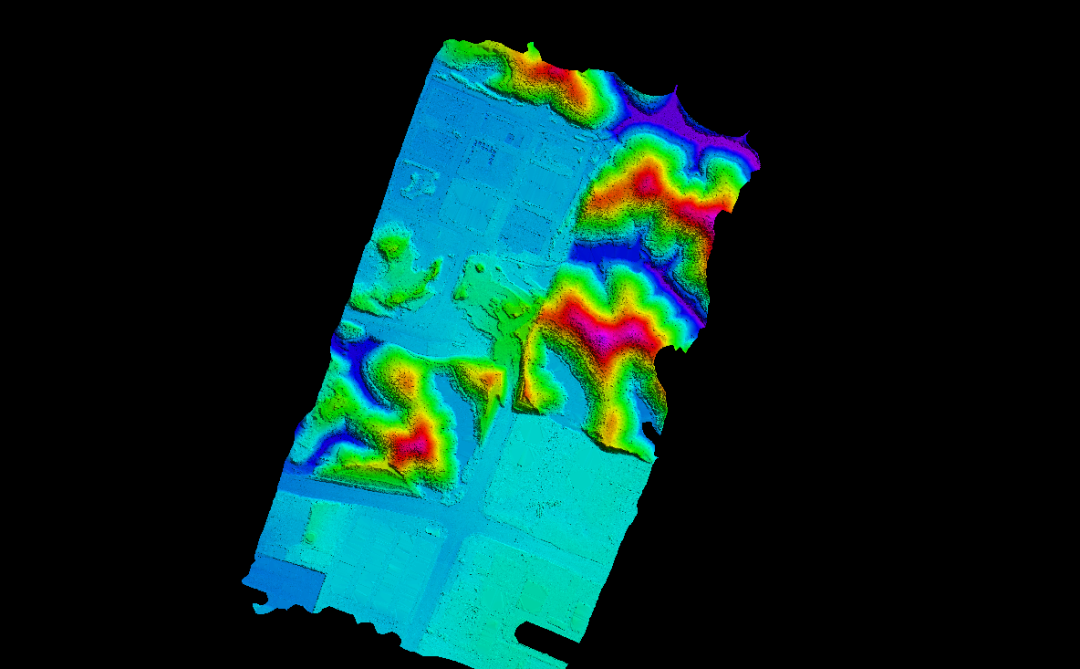
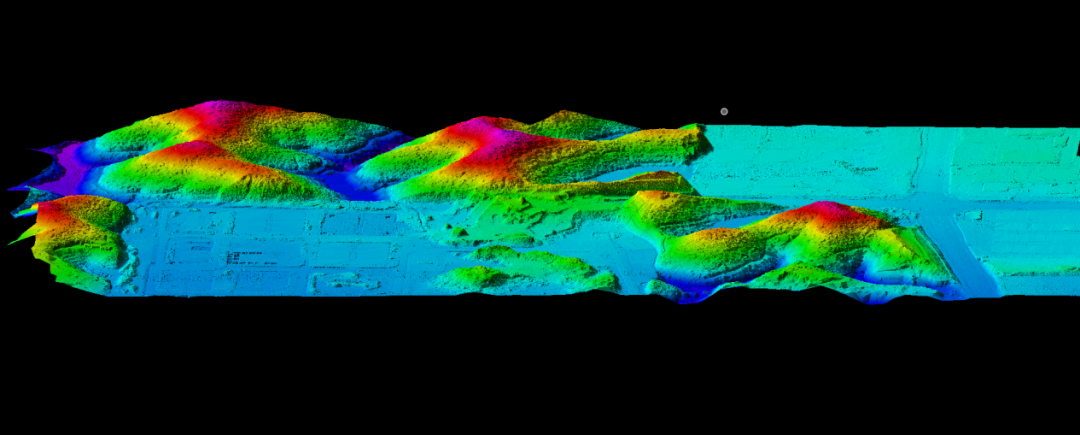
点云可自动化过滤植被,提取地面点,软件自动化程度高,无论是房区还是森林,都可提取密集的地面高程点。可生产等高线、DEM、计算土方量、生成断面等各类成果。内置相机的雷达彩色点云数据可更好更直观地直接绘制地形图。
分类地面点
DEM模型
六、项目总结
此次项目的成功实施,充分展示了中海达轻小型机载激光测量系统在山区林地复杂地形测量中的优势和应用价值。中海达轻小型机载激光测量系统具有高度的便携性和灵活性,体积小、重量轻,可以适配各种轻型飞行器,能够轻松进入复杂地形和人员难以到达的区域,如山区、森林深处等,实现对这些区域的精确测量。

















 9644
9644

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









