




为了打破线性的水床效应约束,探究更快跟踪输入信号的动态环节,引入非线性进行分析。
考虑一个二阶积分器串联型系统

其终点为原点的最速控制综合函数可以表示成下式,相关证明可以参考博客内另外一篇文章
![]()
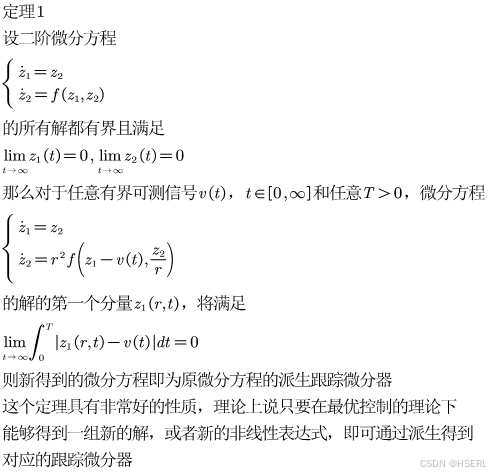
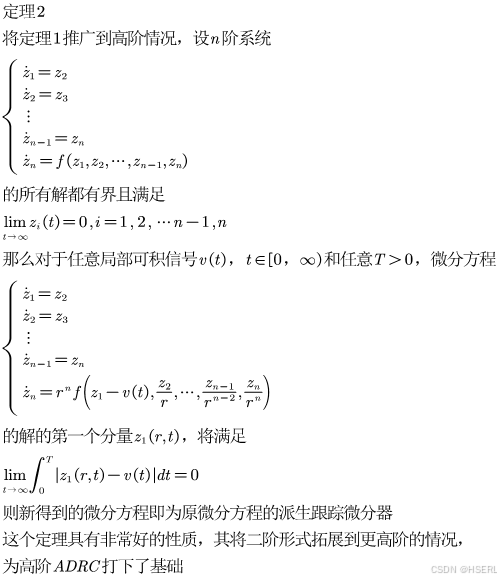
对于跟踪微分器,有两个定理(注,这两个定理的证明比较麻烦,将在后续的文章中说明,此处就直接使用定理)
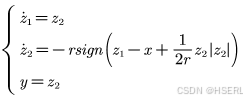
根据定理1,通过上述推导的二阶情况下的最速控制综合函数可以得到其派生系统的跟踪微分器表达式为
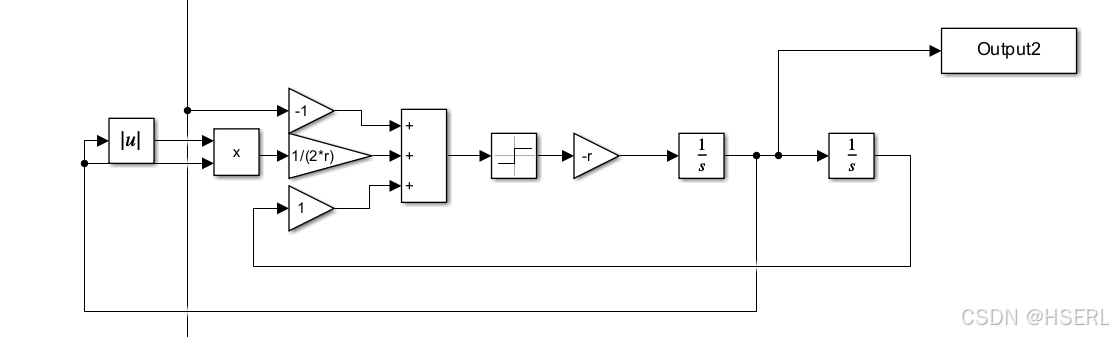
采用Simulink进行仿真
从左往
为了打破线性的水床效应约束,探究更快跟踪输入信号的动态环节,引入非线性进行分析。
考虑一个二阶积分器串联型系统
其终点为原点的最速控制综合函数可以表示成下式,相关证明可以参考博客内另外一篇文章
![]()
对于跟踪微分器,有两个定理(注,这两个定理的证明比较麻烦,将在后续的文章中说明,此处就直接使用定理)
根据定理1,通过上述推导的二阶情况下的最速控制综合函数可以得到其派生系统的跟踪微分器表达式为
采用Simulink进行仿真
从左往
 1511
8495
1511
8495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























