






 本文讨论了解决路径问题,如何从新起点出发并替换旧路径的部分,以确保全局路径的有效更新。提到的方法包括清空并清除旧解决方案,正确使用`keepBefore`操作以避免丢失路径点,并通过`append`整合新旧路径。
本文讨论了解决路径问题,如何从新起点出发并替换旧路径的部分,以确保全局路径的有效更新。提到的方法包括清空并清除旧解决方案,正确使用`keepBefore`操作以避免丢失路径点,并通过`append`整合新旧路径。
保留path的已运动部分,append 从新起点出发的 后序 path
globalsolved = globalsetup.solve(0.005);
if(globalsetup.haveExactSolutionPath())
{
temppath.clear();
temppath = globalsetup.getSolutionPath();
templen = temppath.length();
if(templen<length && templen<globalpath.length())
{
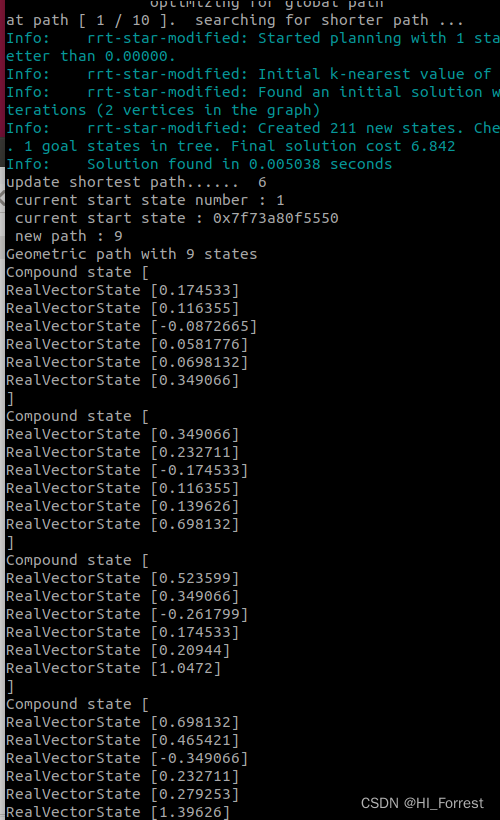
length = templen;
std::cout << "update shortest path...... " << length << std::endl;
/* remove old path and append new one */
temppath.interpolate(10-m_pathindex);
cout << " new path : "<< temppath.getStateCount() <<endl;
temppath.print(cout);
// ob::ScopedState<OmplStateSpace> currentstate(globalsi);
// currentstate = globalpath.getState(m_pathindex);
cout << " current planning's start state: "<<endl;
currentstate.print(cout);
cout << " old global path : "<< globalpath.getStateCount()<< endl;
globalpath.print(cout);
/* keep current state's former path point */
globalpath.keepBefore(globalpath.getState(m_pathindex-1));
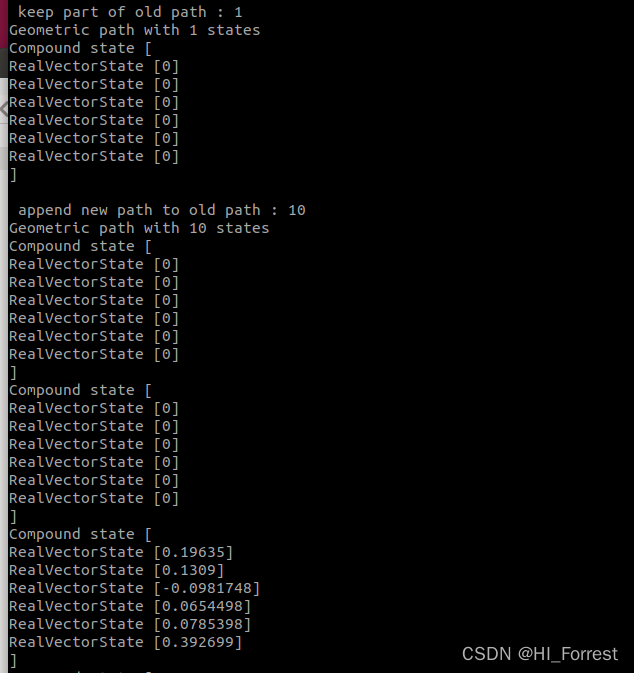
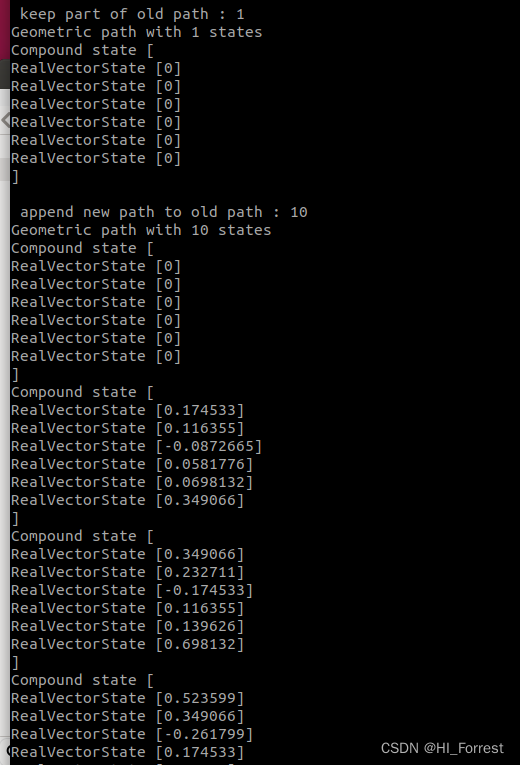
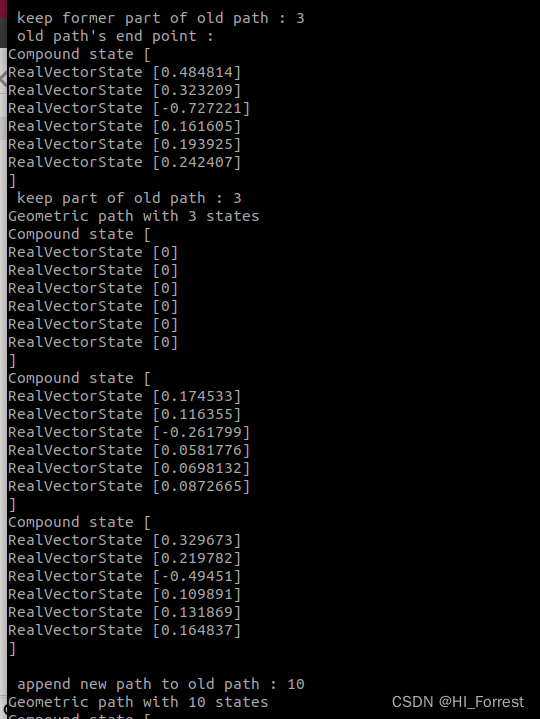
cout << " keep part of old path : "<< globalpath.getStateCount() <<endl;
globalpath.print(cout);
globalpath.append(temppath);
cout << " append new path to old path : "<< globalpath.getStateCount()<<endl;
globalpath.print(cout);
}
}
问题:新的setup 求解是从新起点出发,但是得到的path仍是从旧起点的。append总路径覆盖了新起点为旧的起点。
解决:setup 不仅需要clear start state ,还需要clear ,清除之前的path solution。
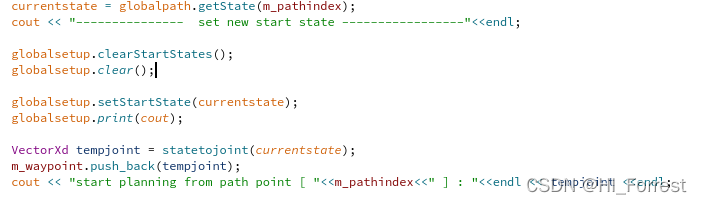
新的path 从新起点出发
新的 整体path
问题:Keepbefore 有时出错,保存的前序路径少一?
解决:弥补:
get state可以得到当前运行中路径段的终点,即当前规划部分的起点状态,存入全局变量endstate,当Keepstate 中状态数量少一时,先append endstate,再append 新path。测试有效,丢失状态原因未解决。


















 2842
2842

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









