





大家好,欢迎阅读这份《智能体(AI+Agent)开发指南》!
在大模型和智能体快速发展的今天,很多朋友希望学习如何从零开始搭建一个属于自己的智能体。本教程的特点是 完全基于国产大模型与火山推理引擎实现,不用翻墙即可上手,非常适合国内开发者快速实践。
通过循序渐进的讲解,你将学会从 环境配置、基础构建、进阶功能到实际案例 的完整流程,逐步掌握智能体开发的核心技能。无论你是初学者还是有经验的工程师,相信这份教程都能为你带来启发。
一. Decomposition-First 方法
◦ 显式任务分解
▪ 在任务开始时,优先将复杂任务拆解为多个子任务或步骤。
▪ 这种分解通常由大模型(LLM)主导,强调结构化、逻辑化的分解过程。
◦ 规划优先于执行
▪ 分解之后,先规划完成路径或执行步骤,再按照规划逐步执行,避免临时性、随意性推理。
▪ 强调“先想清楚,再动手做”。
◦ 子任务形式结构化
▪ 任务分解时通过结构化方式表达子任务或计划,便于后续处理与执行。
◦ 执行依赖明确
▪ 在分解过程中,明确子任务之间的依赖关系或执行顺序,保障整体任务逻辑一致性与执行效率。
二. Reasoning without Observation
• 背景:每一步都Observation,浪费token
现有的增强型语言模型(ALMs)通过交替地调用外部工具并获取反馈来进行推理,“想–查–想–查”穿插执行,但这种方式会因重复提示和多次执行而导致计算复杂度过高。
• 核心思路:先“想”再统一“查”——分离思考与观察
◦ ReWOO 将思考过程和下载工具结果分离,不再每一步思考后立即中断去 “查”。
◦ 模型先连续生成完整思考流程(无工具调用),然后一次性执行所有工具,最后统一获取观察结果,这样减少了中间跳转和 prompt 重复,显著提升 token 使用效率。
◦ Planner包含连续的元组(Plan,#E),其中#Es(s表示步骤编号)是一个特殊的占位符或标记,它用来存储在执行第s步时,从相应的 Worker(执行子任务的组件)那里获得的、被认为是正确的证据(evidence)。
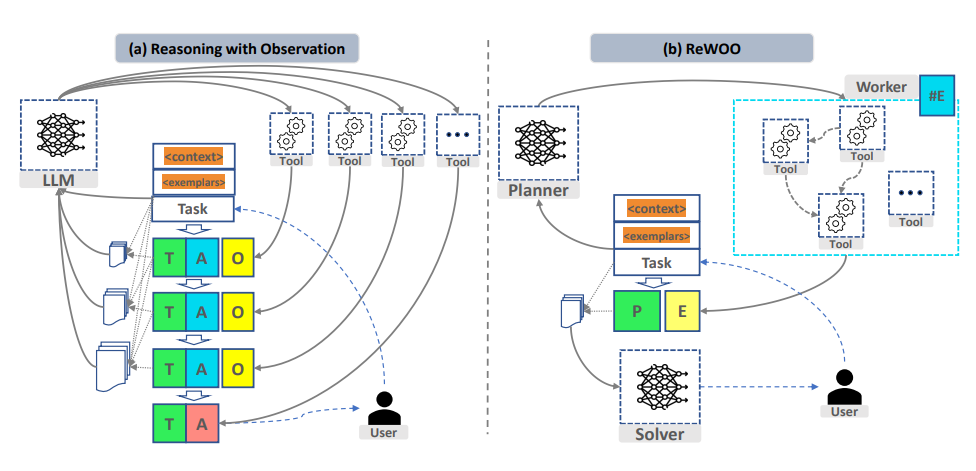
◦ Planner(规划器):用大语言模型(LLM)的推理能力,先生成一份“方案蓝图”,包含每一步的描述信息Plan,以及一个特殊变量#E,用来存储执行证据。
▪ 例如:Plan = “先搜索证据”,#E1 = “搜索结果”
◦ Worker(执行器):根据 Planner 的指令,与外部环境或工具交互,并把真实的观测/结果写入 #E。
◦ Solver(解算器):最后读取所有的 Plan + #E,生成最终答案或者动作的执行状态。
▪ 并且提示 Solver“谨慎”使用这些信息,可以让模型在 Planner 或 Worker 失败时,自己用推理能力弥补。
提示工程与AI智能体构建指南:https://huggingface.co/blog/VirtualOasis/ai-prompt-engineering-and-agents
欢迎关注微信公众号:AIWorkshopLab,自动获取完整教程:智能体(AI+Agent)开发指南.pdf。



















 453
453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











