




4 Radar技术概述
自动驾驶中的Radar是一种利用无线电波探测目标距离、速度和角度的传感器技术。在自动驾驶系统中,雷达通过发射无线电波并接收反射信号来检测周围环境中的物体,从而为车辆提供实时的环境信息。
Lidar在自动驾驶车辆中主要分为两类:
-
主Radar:LRR,MRR
-
角Radar:SRR,USRR
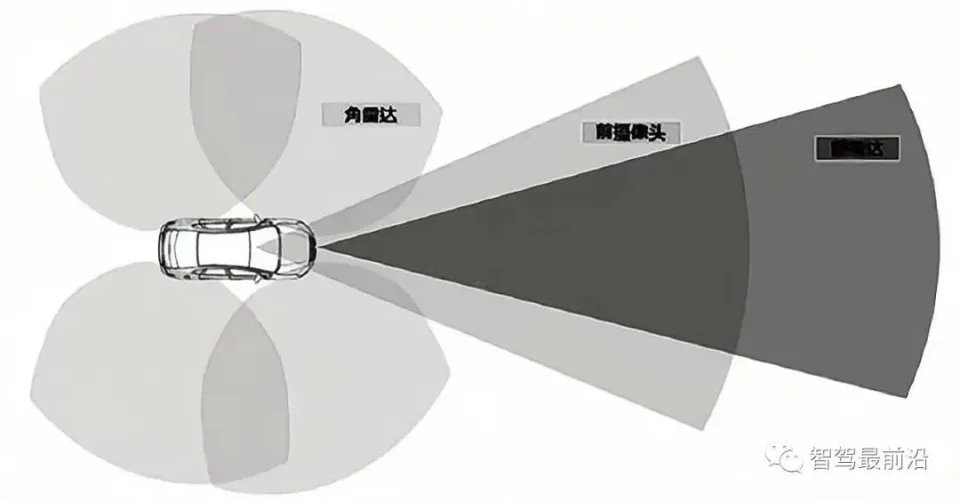
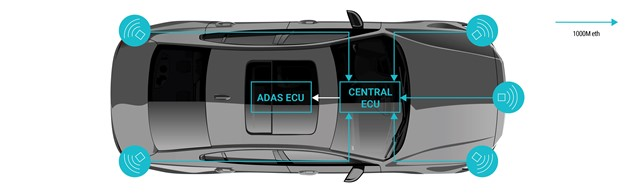
布置位置可以是如下几种:
-
车身前保:主Radar
-
车身保杠的四个角:角Radar
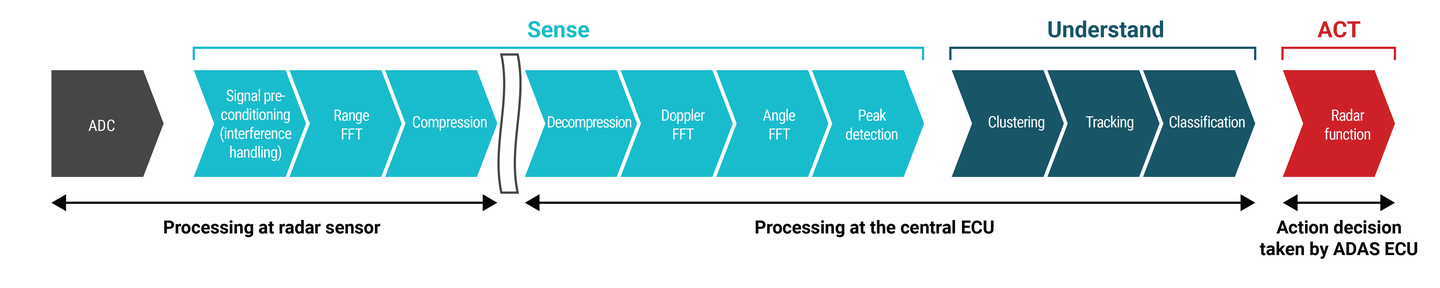
4.1 基本原理
Radar(Radio Detection and Ranging)是一种利用电磁波进行远距离感知和定位的即使,其工作原理如下:
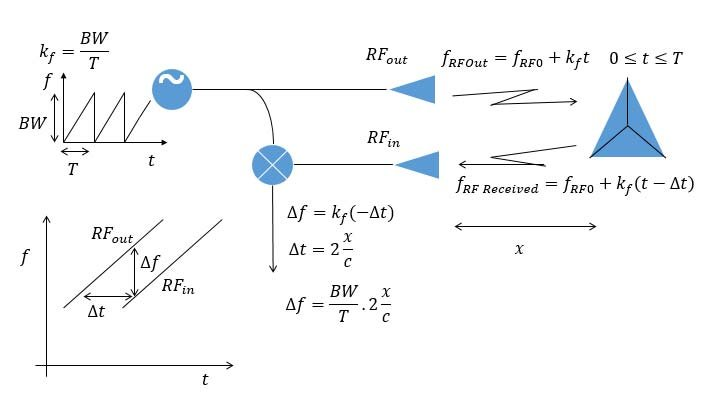
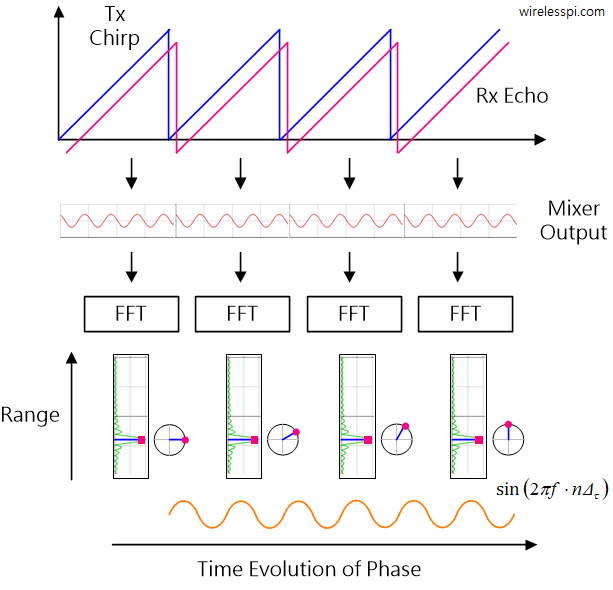
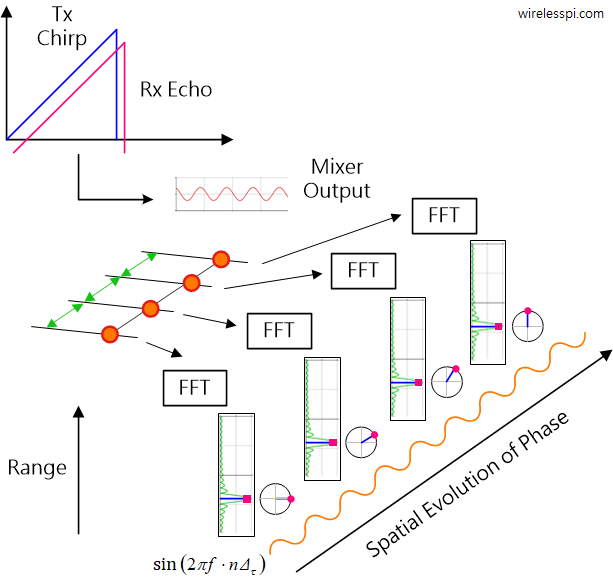
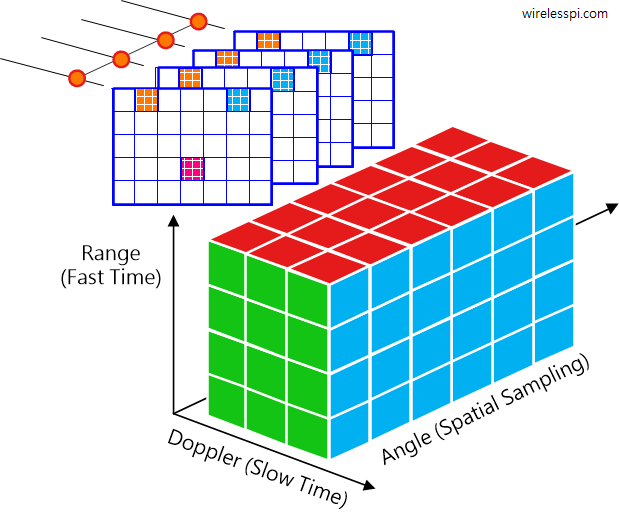
参考文章:FMCW Radar Part 2 - Velocity, Angle and Radar Data Cube | Wireless Pi
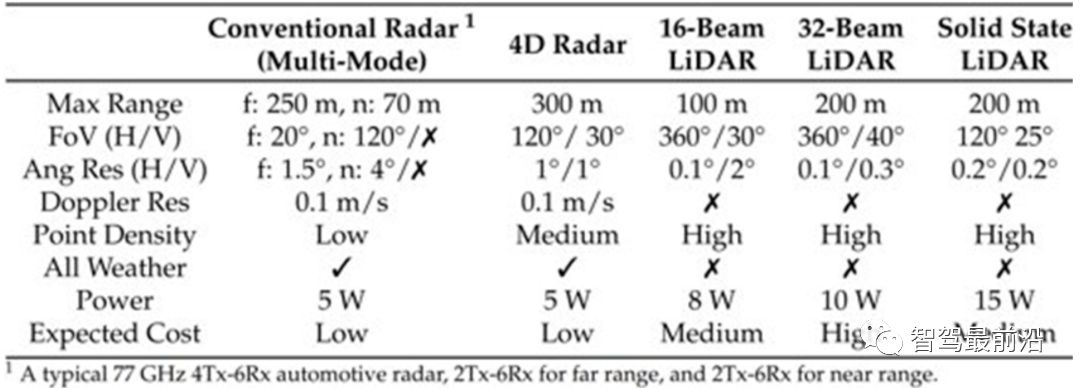
4.2 技术特点
在自动驾驶领域,存在不同类型的雷达,用于不同的应用和距离范围:
-
工作频率在76 GHz到81 GHz的频率范围内。
-
它们适用于长中短距离测量、速度感知测量、方位角(俯仰角)测量;
-
SRR短距角雷达、MRR中距前雷达、LRR长距前雷达、USRR超短距雷达;
-
分布式卫星雷达
雷达在自动驾驶系统中扮演着关键的角色,具体作用如下:
-
远距离感知: 雷达可以检测远距离上的车辆、行人和障碍物,有助于车辆及时采取避障措施。
-
速度测量: 通过测量目标的速度,雷达可以帮助自动驾驶系统预测其他车辆的行为,从而更好地规划驾驶路径。
-
加速度估计:通过基于速度测量值的加速度估计,雷达可以帮助自动驾驶系统预测其他车辆的行为意向,从而更好地规划驾驶路径。
-
动静分离和障碍物检测: 雷达可以检测前方的障碍物,包括静态物体和运动物体,更好的进行动静环境构造,以避免碰撞。
-
夜间和恶劣天气下的感知: 与视觉传感器不同,雷达不受光线条件的限制,因此在夜间和恶劣天气条件下仍能工作良好。
-
数据融合: 雷达数据通常与其他传感器数据(如摄像头和激光雷达)结合使用,以提供全面的环境感知。
4.3 工程实践
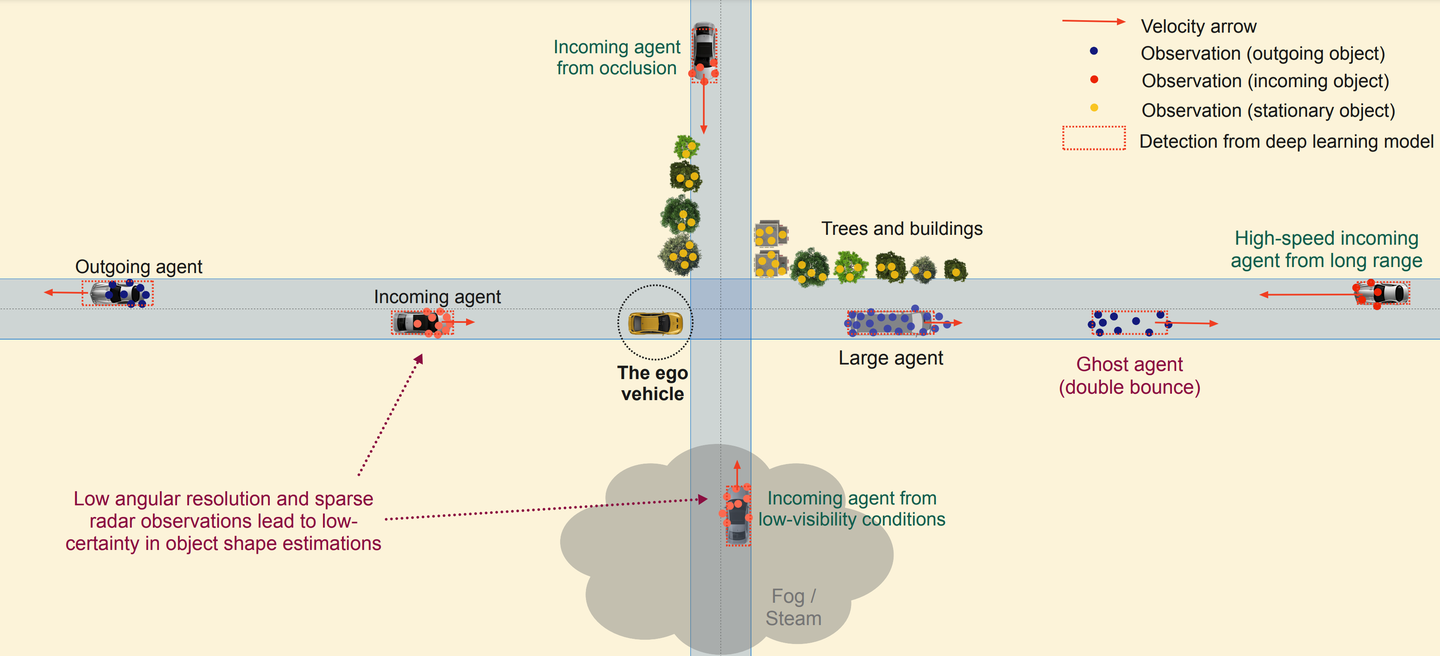
在自动驾驶领域,Radar中关注的一些问题罗列如下:
-
False Positive(鬼影)
-
False Negative(漏检)
-
点云稀疏(Sparse)
-
目标分裂:单目标被输出为多目标
-
目标分类不准确
-
动静分离不准确
-
小目标被大目标吸收
参考:
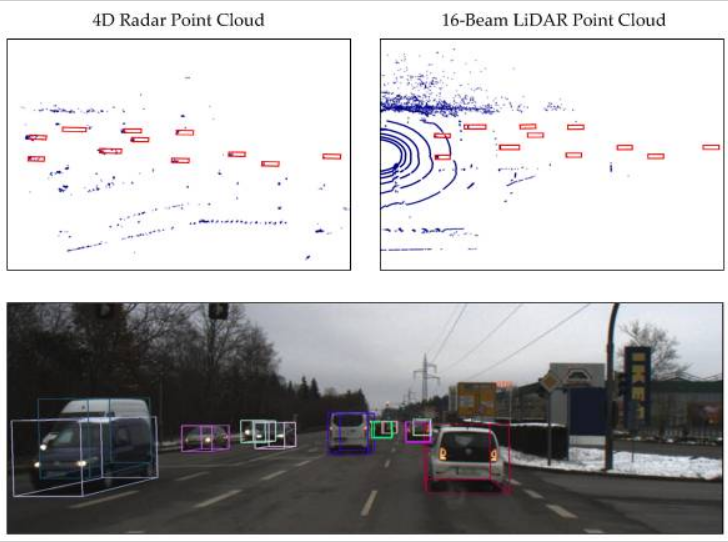
Radars for Autonomous Driving: A Review of Deep Learning Methods and Challenges
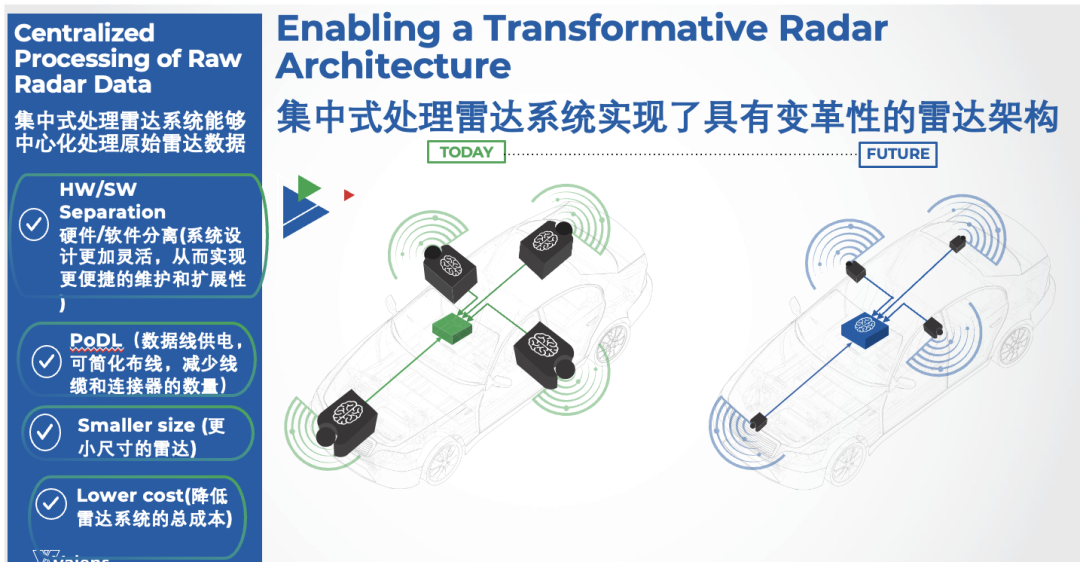
4.4 Radar技术迭代方向
1、4D雷达:8T8R、16T16R(TI、NXP、Infineon)
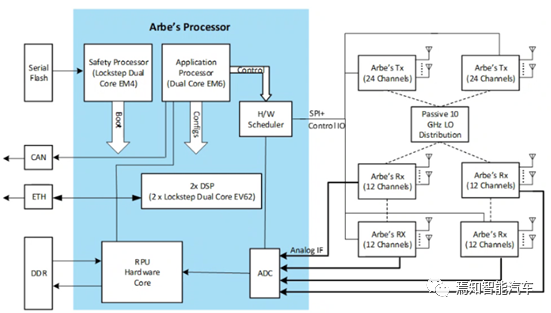
2、4D雷达:48T48R(Arbe)
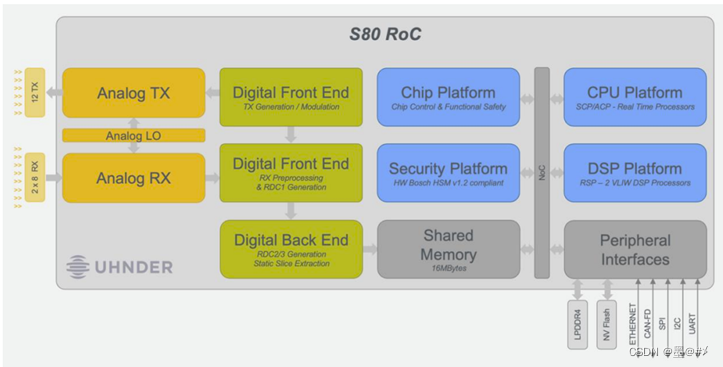
3、4D雷达:12T16R(PMCW)
参考:PMCW体制雷达系列文章(1) - PMCW体制雷达综述
4、分布式卫星雷达

















 1110
1110

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









