




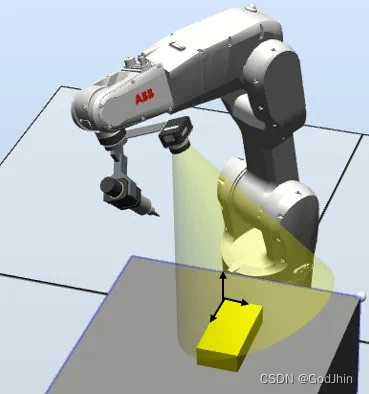
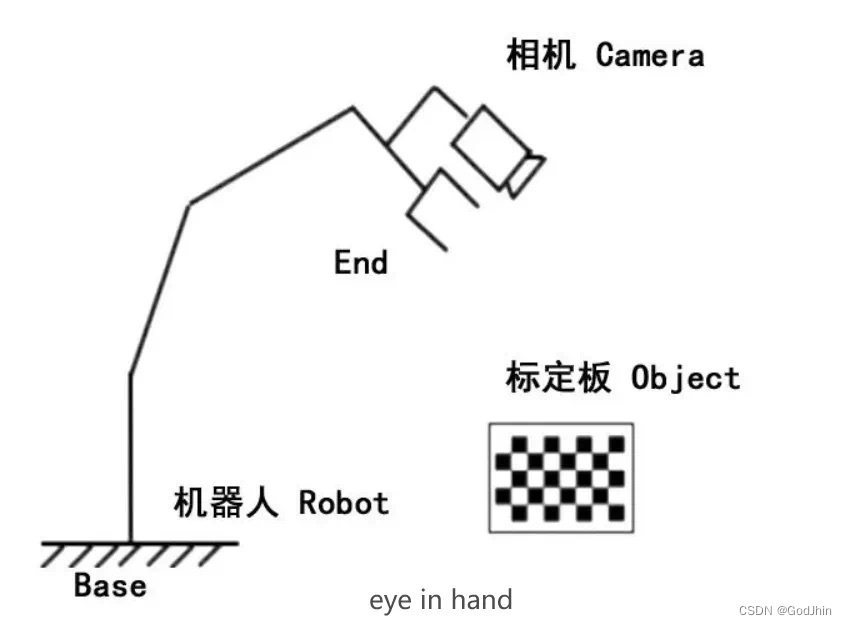
对于3D相机引导机器人运动,通常包括Eye To Hand(相机固定安装)和Eye In Hand(相机装在robot上)。相机出厂完成内参标定(即相机能直接输出产品在相机坐标系下的xyz,单位mm,也包括姿态)。但要相机联合机器人运动,需要完成相机和机器人的手眼标定。
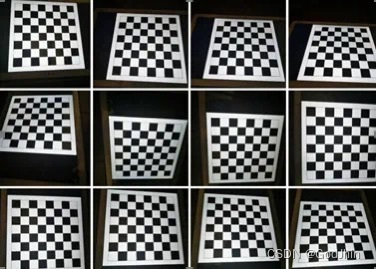
对于Eye In Hand,通常让机器人带着相机对标定板不同姿态进行拍摄,记录对应的tool0位姿和特征在相机坐标系下的位姿(由于标定棋盘格的每格间距已知,可以通过找到棋盘格上所有交叉点并计算各自关系后,找到棋盘格角点在相机坐标系下的xyz,单位mm)。
有了对应机器人不同位姿时的tool0位姿和特征在相机坐标系的位姿,就可以计算tool0到相机坐标系的位姿了(tool0到相机关系,标定板到机器人base的关系不变)。具体即求解AX=XB。相关资料可以网络搜索。
本仿真假设,已经可以获得特征在相机坐标系下的位姿,基于这些位姿,进行标定(即完成AX =XB的求解)。
相关Smart组件
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









