 单电源三极管电路中RB>>RC的原因
单电源三极管电路中RB>>RC的原因





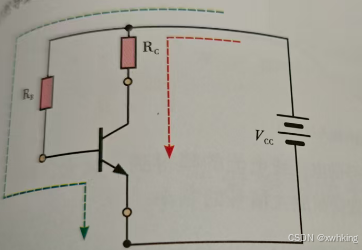
在单电源供电的三极管电路(以最常见的共发射极放大电路为例)中,$RB >> RC 是确保三极管工作在放大状态、且满足是确保三极管工作在放大状态、且满足是确保三极管工作在放大状态、且满足 VC > VB$(集电极电压高于基极电压)的重要条件之一。这一关系的核心是通过合理分配电源电压,保证三极管的发射结正偏、集电结反偏(放大状态的基本要求)。
一、电路背景与核心需求
单电源供电时(假设电源电压为 VCCVCCVCC),电路通过电阻 RBRBRB(基极偏置电阻)给基极提供电流 IBIBIB,通过 RCRCRC(集电极负载电阻)形成集电极电压 VCVCVC。三极管放大状态的关键条件是:
-
发射结正偏:VB>VEVB > VEVB>VE(若发射极接地,则 VE=0VE=0VE=0,即 VB>0VB > 0VB>0)。
-
集电结反偏:VC>VBVC > VBVC>VB(集电极电压高于基极电压,确保集电结反向截止,便于收集载流子)。
二、为什么需要 RB>>RCRB >> RCRB>>RC?
要满足 VC > VB,需从基极和集电极的电压分配分析:
- 基极电压 VB 的计算
基极电流 IB 流过 RB 时,会在 RB 上产生压降。根据欧姆定律:
VCC=VB+IB⋅RBV_{CC} = V_B + I_B \cdot R_BVCC=VB+IB⋅RB
(忽略发射结导通电压时,可简化为 $V_B \approx V_{CC} - I_B \cdot R_B $)
- 集电极电压 VC 的计算
集电极电流 IC 流过 RC 时,RC 上的压降为 IC⋅RCI_C \cdot R_CIC⋅RC,因此:
VC=VCC−IC⋅RCV_C = V_{CC} - I_C \cdot R_CVC=VCC−IC⋅RC
(三极管放大时,IC≈β⋅IBI_C \approx \beta \cdot I_BIC≈β⋅IB,β 为电流放大倍数)
- VC > VB 的条件推导
将上述两式代入 VC>VBV_C > V_BVC>VB:
VCC−IC⋅RC>VCC−IB⋅RBV_{CC} - I_C \cdot R_C > V_{CC} - I_B \cdot R_BVCC−IC⋅RC>VCC−IB⋅RB
化简得:
IB⋅RB>IC⋅RCI_B \cdot R_B > I_C \cdot R_CIB⋅RB>IC⋅RC
代入 IC=β⋅IBI_C = \beta \cdot I_BIC=β⋅IB,约去 IB 后:
RB>β⋅RCR_B > \beta \cdot R_CRB>β⋅RC
由于 β 通常为几十到几百(如 50~200),实际设计中为了确保该条件成立,会取 RB 远大于 RC(例如 RB 是 RC 的 10~100 倍),即使 β 较大时仍能满足 RB>β⋅RCR_B > \beta \cdot R_CRB>β⋅RC,从而保证 VC>VBV_C > V_BVC>VB。
三、总结
-
单电源供电时,三极管的基极电压 VBVBVB 和集电极电压 VCVCVC均由 VCCVCCVCC 分压得到。
-
RB >> RC 的本质是通过较大的基极电阻,使基极电流 IBIBIB 产生的压降(IB・RBIB・RBIB・RB)远大于集电极电流 ICICIC 产生的压降(IC・RCIC・RCIC・RC)。
-
最终确保集电结反偏(VC>VBVC > VBVC>VB),使三极管工作在放大状态,而非饱和状态(饱和时 VC<VBVC < VBVC<VB)。
这一设计原则在共发射极放大电路、开关电路等单电源三极管电路中广泛应用,是电路正常工作的基础。


















 7638
7638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











