




标题:
《From Coarse to Fine: Robust Hierarchical Localization at Large Scale》
作者:Paul-Edouard Sarlin, Cesar Cadena, Roland Siegwart, Marcin Dymczyk
所属机构:1) Autonomous Systems Lab, ETH Zürich; 2) 2Sevensense Robotics AG
摘要:
- 这篇论文讨论了视觉定位,这是许多应用如自动驾驶、移动机器人和增强现实中的基础技术。
- 针对大规模环境中由于外观变化所导致的视觉定位难题,提出了一个基于单目全局卷积神经网络(CNN)的分层方法,该方法可以预测局部和全局特征。
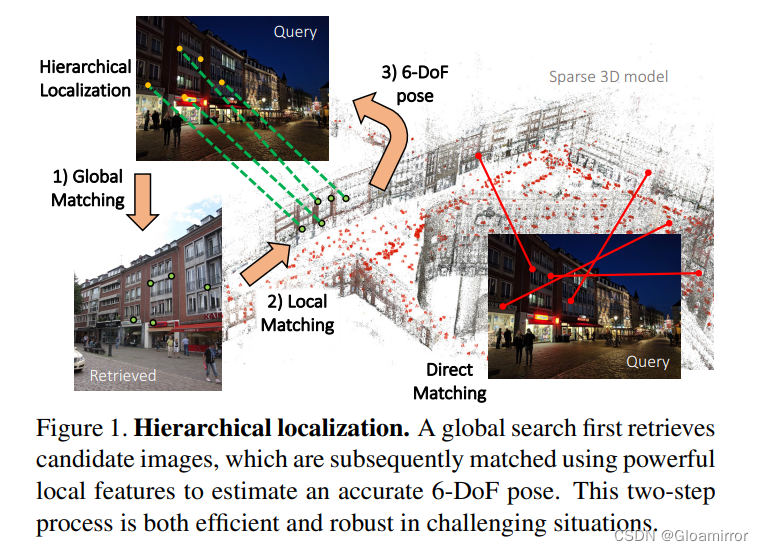
- 提出的分层定位策略首先使用全局匹配来定位大体位置,然后使用局部匹配来进一步精细化位置。这种方法既节省了时间又提高了实时操作性。
- 实验表明,该方法在大规模变化的标准数据集上表现出了卓越的定位结果。
引言:
-
背景:精确的视觉定位在多种应用中至关重要。然而,大规模的环境变化和不同设备间的限制对于视觉定位技术提出了挑战。
-
主要研究内容:作者提出了一种仿照人类定位机制的粗到细的策略,结合全局描述符和局部特征。该方法适应大型环境,并在实际应用中展示了提高的稳健性和效率。此外,他们介绍了HF-Net,一个可以联合预测局部和全局特征的单一卷积神经网络(CNN)。这种方法利用多任务蒸馏的技术,将多种预测器联合到一个模型中,实现了在不同的任务上都具有稳健性和计
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2409
2409

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









