




参考文章:小车yolo机械臂(二)机械臂仿真 ros下从xacro模型文件搭建Moveit!+Gazebo仿真系统
从网上下载这几个文件
测试moveit的配置文件里的demo:
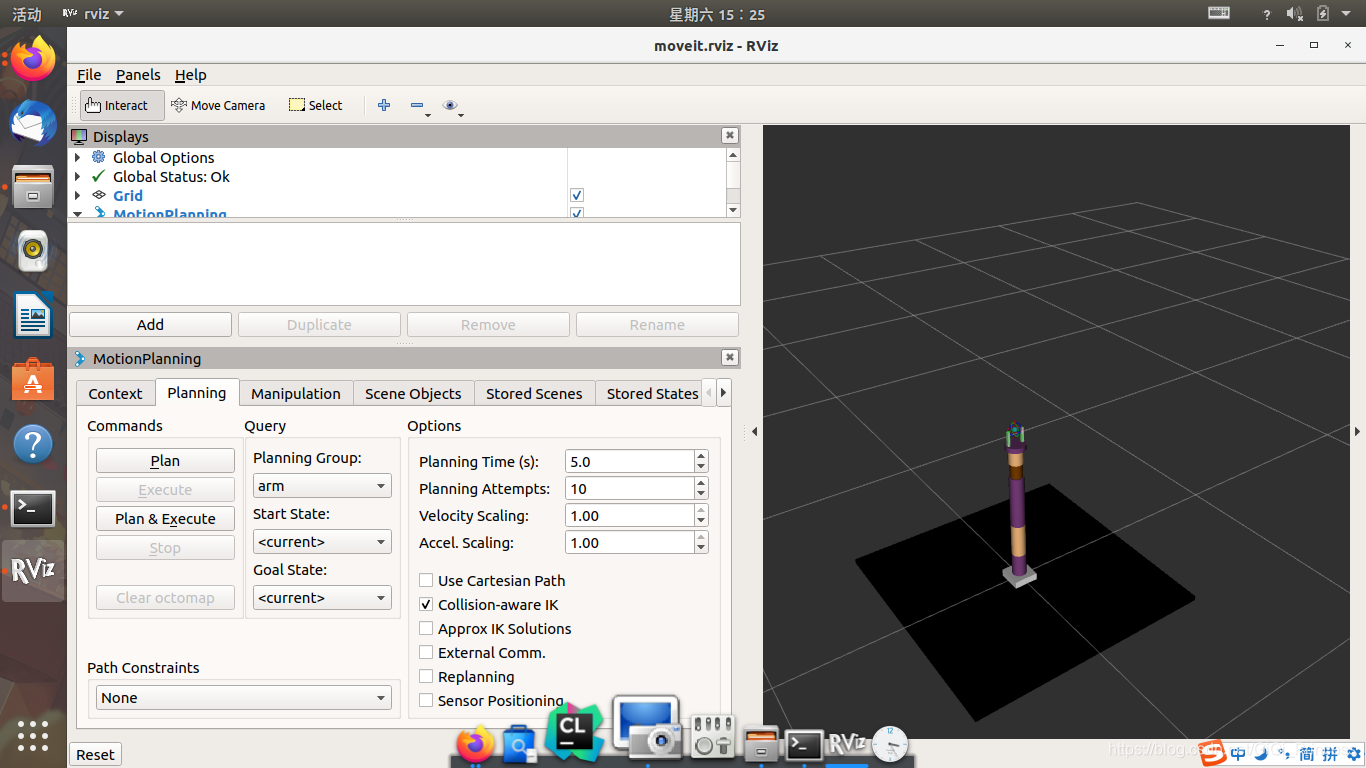
roslaunch marm_moveit_config demo.launch
出现Rviz界面,可以拖动小球让他运动
运行查看机械臂模型在gaz
 本文介绍了如何使用ROS、Moveit!和Gazebo进行机械臂仿真。通过下载相关文件并配置demo,解决Rviz报错问题,调整FixedFrame与RobotModel,并启用MotionPlanning,实现机械臂在rviz中的运动。同时,文中提到在gazebo中机械臂无法运动的问题,解决方法是取消gazebo配置文件的注释。
本文介绍了如何使用ROS、Moveit!和Gazebo进行机械臂仿真。通过下载相关文件并配置demo,解决Rviz报错问题,调整FixedFrame与RobotModel,并启用MotionPlanning,实现机械臂在rviz中的运动。同时,文中提到在gazebo中机械臂无法运动的问题,解决方法是取消gazebo配置文件的注释。
参考文章:小车yolo机械臂(二)机械臂仿真 ros下从xacro模型文件搭建Moveit!+Gazebo仿真系统
从网上下载这几个文件
测试moveit的配置文件里的demo:
roslaunch marm_moveit_config demo.launch
出现Rviz界面,可以拖动小球让他运动
运行查看机械臂模型在gaz
 1万+
811
1万+
811

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















 到【灌水乐园】发言
到【灌水乐园】发言







