




转载请注明出处:https://thinkgamer.blog.youkuaiyun.com/article/details/101033364
博主微博:http://weibo.com/234654758
Github:https://github.com/thinkgamer
公众号:搜索与推荐Wiki
引言
神经网络中的网络优化和正则化问题介绍主要分为一,二,三,四篇进行介绍(如下所示),本篇为最后一篇主要介绍神经网络中的网络正则化。
- 第一篇包括
- 网络优化和正则化概述
- 优化算法介绍
- 第二篇包括
- 参数初始化
- 数据预处理
- 逐层归一化
- 第三篇包括
- 超参数优化
- 第四篇包括
- 网络正则化
机器学习模型中的关键是泛化问题,即样本在真实数据集上的期望风险最小化,而在训练集上的经验风险最小化和期望风险并不一致。由于神经网络的拟合能力很强,其在训练集上的训练误差会降的很小,从而导致过拟合。
**正则化(Regularization)**是一类通过限制模型复杂度,从而避免过拟合,提高模型泛化能力的一种方法,包括引入一些约束规则,增加先验,提前终止等。
在传统的机器学习模型中,提高模型泛化能力的主要方法是限制模型复杂度,比如 l 1 , l 2 l_1,l_2 l1,l2正则,但是在训练深层神经网络时,特别是在过度参数(OverParameterized)时, l 1 , l 2 l_1,l_2 l1,l2正则化不如机器学习模型中效果明显,因此会引入其他的一些方法,比如:数据增强,提前终止,丢弃法,继承法等。
l 1 , l 2 l_1,l_2 l1,l2正则
l 1 , l 2 l_1,l_2 l1,l2正则是机器学习中常用的正则化方法,通过约束参数的 l 1 , l 2 l_1,l_2 l1,l2范数来减少模型在训练数据上的过拟合现象。
通过引入
l
1
,
l
2
l_1,l_2
l1,l2正则,优化问题变为:
a
θ
∗
=
a
r
g
m
i
n
a
1
N
L
(
y
n
,
f
(
x
n
,
θ
)
)
+
λ
l
p
(
θ
)
a\theta ^* = \underset{a}{ arg \, min } \frac{1}{N} L ( y^n, f(x^n, \theta))+\lambda l_p(\theta)
aθ∗=aargminN1L(yn,f(xn,θ))+λlp(θ)
L
L
L为损失函数,
N
N
N为训练的样本数量,
f
(
.
)
f(.)
f(.)为待学习的神经网络,
θ
\theta
θ为参数,
l
p
l_p
lp为
l
1
,
l
2
l_1,l_2
l1,l2正则中的一个,
λ
\lambda
λ为正则项系数。
带正则化的优化问题等价于下面带约束条件的优化问题:
θ
∗
=
a
r
g
m
i
n
a
1
N
L
(
y
n
,
f
(
x
n
,
θ
)
)
s
u
b
j
e
c
t
t
o
l
p
(
θ
)
≤
1
\theta ^* = \underset{a}{ arg \, min } \frac{1}{N} L ( y^n, f(x^n, \theta)) \\ subject \, to \, l_p(\theta) \leq 1
θ∗=aargminN1L(yn,f(xn,θ))subjecttolp(θ)≤1
下图给出了不同范数约束条件下的最优化问题示例:
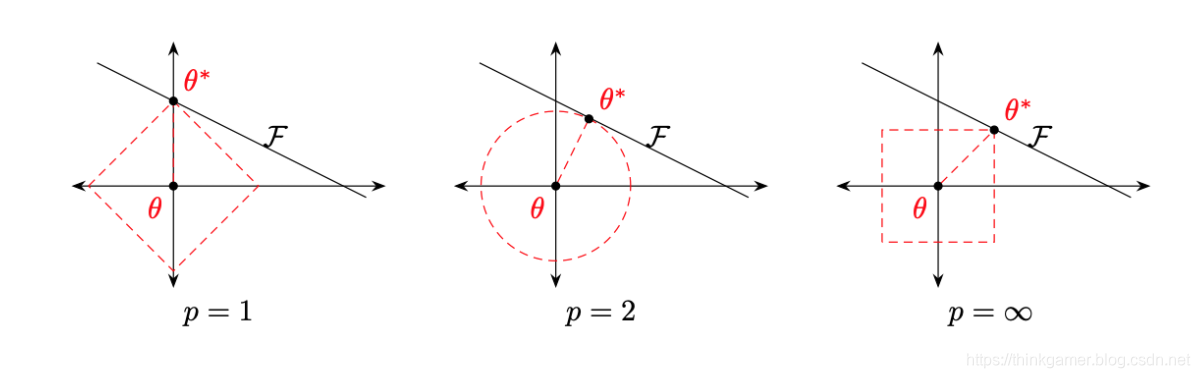
上图中红线表示 l p l_p lp范数,黑线表示 f ( θ ) f(\theta) f(θ)的等高线(简单起见,这里用直线表示)
从上图最左侧图可以看出,
l
1
l_1
l1范数的约束条件往往会使最优解位于坐标轴上,从而使用最终的参数为稀疏向量,此外
l
1
l_1
l1范数在零点不可导,常用下式来代替:
l
1
(
θ
)
=
∑
i
θ
i
2
+
ϵ
l_1(\theta) = \sum_{i} \sqrt{\theta_i ^2 + \epsilon }
l1(θ)=i∑θi2+ϵ
其中
ϵ
\epsilon
ϵ为一个非常小的常数。
一种折中的方法是弹性网络正则化(Elastic Net Regularization) ,同时加入
l
1
,
l
2
l_1, l_2
l1,l2正则,如下:
a
θ
∗
=
a
r
g
m
i
n
a
1
N
L
(
y
n
,
f
(
x
n
,
θ
)
+
λ
1
l
1
(
θ
)
+
λ
2
l
2
(
θ
)
a\theta ^* = \underset{a}{ arg \, min } \frac{1}{N} L ( y^n, f(x^n, \theta)_+\lambda_1 l_1(\theta) + \lambda_2 l_2(\theta)
aθ∗=aargminN1L(yn,f(xn,θ)+λ1l1(θ)+λ2l2(θ)
其中
λ
1
,
λ
2
\lambda_1, \lambda_2
λ1,λ2分别是正则化项的参数。
权重衰减
权重衰减(Weight Deacy) 也是一种有效的正则化方法,在每次调参时,引入一个衰减系数,表示式为:
θ
t
←
(
1
−
w
)
θ
t
−
1
−
α
g
t
\theta_t \leftarrow (1-w)\theta_{t-1} - \alpha g_t
θt←(1−w)θt−1−αgt
其中
g
t
g_t
gt为第t次更新时的梯度,
α
\alpha
α为学习率,
w
w
w为权重衰减系数,一般取值比较小,比如0.0005。在标准的随机梯度下降中,权重衰减和
l
2
l_2
l2正则达到的效果相同,因此,权重衰减在一些深度学习框架中用
l
2
l_2
l2正则来代替。但是在较为复杂的优化方法中,两者并不等价。
提前终止
提前终止(early stop) 对于深层神经网络而言是一种简单有效的正则化方法,由于深层神经网络拟合能力很强,比较容易在训练集上过拟合,因此在实际操作时往往产出一个和训练集独立的验证集,并用在验证集上的错误来代表期望错误,当验证集上的错误不再下降时,停止迭代。
然而在实际操作中,验证集上的错误率变化曲线并不是一条平衡的曲线,很可能是先升高再降低,因此提前停止的具体停止标准需要根据实际任务上进行优化。
丢弃法
当训练一个深层神经网络时,可以随机丢弃一部分神经元(同时丢弃其对应的连接边)来避免过拟合,这种方法称为 丢弃法(Dropout Method)。每次丢弃的神经元为随机的,对于每一个神经元都以一个概率p来判断要不要停留,对于每一个神经层
y
=
f
(
W
x
+
b
)
y=f(Wx + b)
y=f(Wx+b),我们可以引入一个丢弃函数
d
(
.
)
d(.)
d(.)使得
y
=
f
(
W
d
(
x
)
+
b
)
y=f(Wd(x)+b)
y=f(Wd(x)+b)。丢弃函数的定义为:
d
(
x
)
=
{
m
⊙
x
,
W
h
e
n
T
r
a
i
n
p
x
,
W
h
e
n
T
e
s
t
d(x) = \left\{\begin{matrix} m \odot x, When \, Train\\ px, When \, Test \end{matrix}\right.
d(x)={m⊙x,WhenTrainpx,WhenTest
其中
m
∈
{
0
,
1
}
d
m \in \{0,1\}^d
m∈{0,1}d是丢弃掩码(dropout mask),通过以概率为p的贝努力分布随机生成,
p
p
p可以通过一个验证集选取一个最优值,也可以设置为0.5, 这样对大部分网络和任务比较有效。在训练时,神经元的平均数量为原来的
p
p
p倍,而在测试时,所有的神经元都可以是激活的,这会造成训练时和测试时的网络结构不一致,为了缓解这个问题,在测试时,需要将每一个神经元的输出乘以
p
p
p,也相当于把不同的神经网络做了一个平均。
下图给出了一个网络经过dropout的示例。
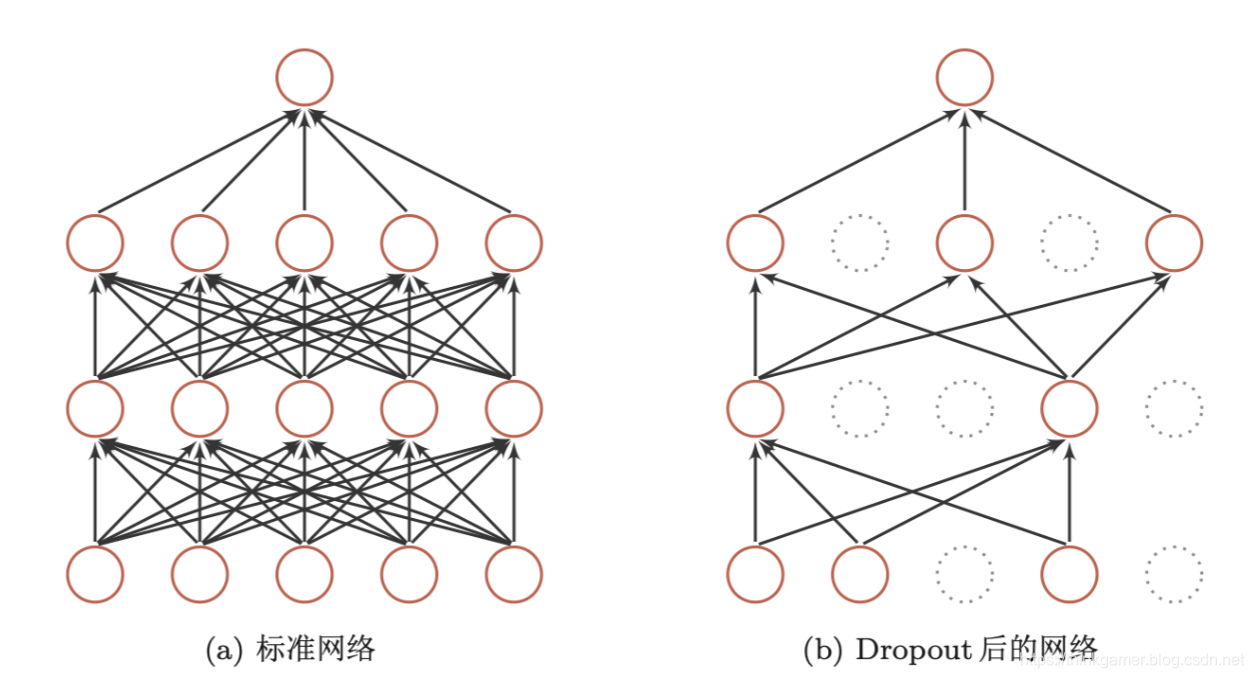
一般来讲,对于隐藏层的神经元,丢弃率 p = 0.5 p=0.5 p=0.5时最好,这样当训练时有一半的神经元是丢弃的,随机生成的网络结构具有多样性。对于输入层的神经元,其丢弃率往往设置为更接近于1的数,使得输入变化不会太大,对输入层的神经元进行丢弃时,相当于给数据增加噪声,提高网络的鲁棒性。
丢弃法一般是针对神经元进行随机丢弃,但是也可以扩展到神经元之间的连接进行随机丢弃,或每一层进行随机丢弃。
丢弃法有两种解释:
(1)集成学习的解释
每做一次丢弃,相当于从原始的网络中采样得到一个子网络,如果一个神经网络有n个神经元,那么可以采样出
2
n
2^n
2n个子网络,每次训练都相当于是训练一个不同的子网络,这些子网络都共享最开始的参数。那么最终的网络可以看成是集成了指数级个不同风格的组合模型。
(2)贝叶斯学习的解释
丢弃法也可以解释为一个贝叶斯学习的近似,用
y
=
f
(
x
,
θ
)
y=f(x,\theta)
y=f(x,θ)表示一个要学习的网络,贝叶斯学习是假设参数
θ
\theta
θ为随机向量,并且先验分布为
q
(
θ
)
q(\theta)
q(θ),贝叶斯方法的预测为:
E
q
(
θ
)
[
y
]
=
∫
q
f
(
x
,
θ
)
q
(
θ
)
d
θ
≈
1
M
∑
m
=
1
M
f
(
x
,
θ
m
)
E_{q(\theta)}[y] = \int_{q}f(x,\theta)q(\theta)d\theta \approx \frac{1}{M}\sum_{m=1}^{M}f(x, \theta_m)
Eq(θ)[y]=∫qf(x,θ)q(θ)dθ≈M1m=1∑Mf(x,θm)
其中
f
(
x
,
θ
m
)
f(x, \theta_m)
f(x,θm)为第m次应用丢弃方法后的网络,其参数
θ
m
\theta_m
θm为全部参数
θ
\theta
θ的一次采样。
数据增强
深层神经网络的训练需要大量的样本才能取得不错的效果,因为在数据量有限的情况下,可以通过 **数据增强(Data Augmentation)**来增加数据量,提高模型鲁棒性,避免过拟合。目前数据增强主要应用在图像数据上,在文本等其他类型的数据还没有太好的方法。
图像数据增强主要通过算法对图像进行转换,引入噪声方法增强数据的多样性,增强的方法主要有:
- 转换(Rotation):将图像按照顺时针或者逆时针方向随机旋转一定的角度;
- 翻转(Flip):将图像沿水平或者垂直方向随机翻转一定的角度;
- 缩放(Zoom in/out):将图像放大或者缩小一定的比例;
- 平移(Shift):将图像按照水平或者垂直的方法平移一定步长;
- 加噪声(Noise):加入随机噪声。
标签平滑
在数据增强中,可以通过给样本加入随机噪声来避免过拟合,同样也可以给样本的标签引入一定的噪声。假设在训练数据集中,有一些样本的标签是被错误标注的,那么最小化这些样本上的损失函数会导致过拟合。一种改善的正则化方法是标签平滑(label smothing),即在输出标签中随机加入噪声,来避免模型过拟合。
一个样本
x
x
x的标签一般用onehot向量表示,如下:
y
=
[
0
,
.
.
.
,
0
,
1
,
.
.
.
.
.
,
1
]
T
y = [0,...,0,1,.....,1]^T
y=[0,...,0,1,.....,1]T
这种标签可以看作硬目标(hard targets),如果使用softmax分类器并使用交叉熵损失函数,最小化损失函数会使得正确类和其他类权重差异很大。根据softmax函数的性质可以知道,如果要使得某一类的输出概率接近于1,其未归一化的得分要远大于其他类的得分,这样可能会导致其权重越来越大,并导致过拟合。i
此外如果标签是错误的,会导致严重的过拟合现象,为了改善这种情况,我们可以引入一个噪声会标签进行平滑,即假设样本以
ϵ
\epsilon
ϵ的概率为其他类,平滑后的标签为:
y
~
=
[
ϵ
K
−
1
,
.
.
.
,
ϵ
K
−
1
,
1
−
ϵ
,
ϵ
K
−
1
,
.
.
.
.
,
ϵ
K
−
1
]
T
\tilde{y} =[ \frac{ \epsilon }{K-1} ,...,\frac{ \epsilon }{K-1} ,1- \epsilon,\frac{ \epsilon }{K-1},....,\frac{ \epsilon }{K-1}]^T
y~=[K−1ϵ,...,K−1ϵ,1−ϵ,K−1ϵ,....,K−1ϵ]T
其中
K
K
K为标签数量,这种标签可以看作是软目标(soft targets)。标签平滑可以避免模型的输出过拟合到硬目标上,并且通常不会降低其分类能力。
上边的标签平滑方法是给其他 K − 1 K-1 K−1个标签相同的概率 ϵ K − 1 \frac{\epsilon}{K-1} K−1ϵ,没有考虑目标之间的相关性。一种更好的做法是按照类别相关性来赋予其他标签不同的概率,比如先训练另外一个更复杂的教师网络,并使用大网络的输出作为软目标进行训练学生网络,这种方法也称为知识精炼(Knowledge Distillation)。
总结
至此,神经网络中的网络优化和正则化(一)(二)(三)(四)篇已经完成,如下:
- 神经网络中的网络优化和正则化(一)之学习率衰减和动态梯度方向
- 神经网络中的网络优化和正则化(二)之参数初始化/数据预处理/逐层归一化
- 神经网络中的网络优化和正则化(三)之超参数优化
- 神经网络中的网络优化和正则化(四)之正则化
神经网络中的网络优化和正则化即是对立又统一的关系,一方面我们希望找到一个最优解使得模型误差最小,另一方面又不希望得到一个最优解,可能陷入过拟合。优化和正则化的目标是期望风险最小化。
目前在深层神经网络中泛化能力还没有很好的理论支持,在传统的机器学习上比较有效的 l 1 , l 2 l_1,l_2 l1,l2正则化在深层神经网络中作用也比较有限,而一些经验性的做法,比如随机梯度下降和提前终止,会更加有效。



















 915
915




 到【灌水乐园】发言
到【灌水乐园】发言







