




 本文深入探讨了多项式轨迹规划在机器人运动控制中的应用,重点介绍了三次多项式轨迹规划原理及其实现过程,包括如何根据给定的位置、速度和时间参数确定轨迹,并通过MATLAB仿真展示轨迹生成与速度、加速度的变化。
本文深入探讨了多项式轨迹规划在机器人运动控制中的应用,重点介绍了三次多项式轨迹规划原理及其实现过程,包括如何根据给定的位置、速度和时间参数确定轨迹,并通过MATLAB仿真展示轨迹生成与速度、加速度的变化。
多项式轨迹–三次轨迹
1.4 Cubic trajectory
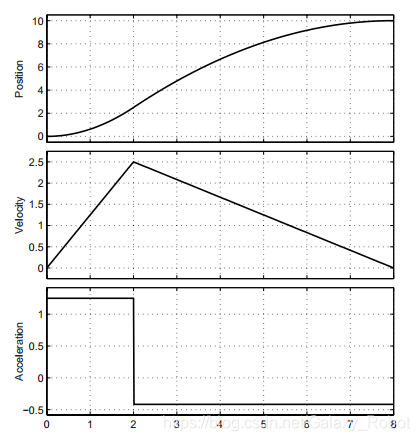
图 3 三次多项式轨迹
一旦指定了t0,t1{
{t}_{0}},{
{t}_{1}}t0,t1时刻的位置和速度的值(q0,q1v0,v1)\left({
{q}_{0}},{
{q}_{1}}{
{v}_{0}},{
{v}_{1}} \right)(q0,q1v0,v1) ,那么有四个条件需要满足,所以必须使用三次多项式
q(t)=a0+a1(t−t0)+a2(t−t0)2+a3(t−t0)3,t0≤t≤t1(1-21) q\left(t \right)={
{a}_{0}}+{
{a}_{1}}\left( t-{
{t}_{0}} \right)+{
{a}_{2}}{
{\left(t-{
{t}_{0}} \right)}^{2}}+{
{a}_{3}}{
{\left( t-{
{t}_{0}}\right)}^{3}},{
{t}_{0}}\le t\le {
{t}_{1}} \tag{1-21} q(t)=a0+a1(t−t0)+a2(t−t0)2+a3(t−t0)3,t0≤t≤t1(1-21)
根据给定条件,可求得四个系数分别为
{
a0=q0a1=v0a2=3h−(2v0+v1)TT2a3=−2h+(v0+v1)TT3a0=q0a1=v0a2=3h−(2v0+v1)TT2a3=−2h+(v0+v1)TT3(1-22) \begin{cases} \begin{matrix} {
{a}_{0}}&=&{
{q}_{0}} \\ {
{a}_{1}}&=&{
{v}_{0}} \\ {
{a}_{2}}&=&\frac{3h-\left( 2{
{v}_{0}}+{
{v}_{1}} \right)T}{
{
{T}^{2}}} \\ {
{a}_{3}}&=&\frac{-2h+\left( {
{v}_{0}}+{
{v}_{1}} \right)T}{
{
{T}^{3}}} \\ {
{a}_{0}}&=& {
{q}_{0}} \\ {
{a}_{1}}&=& {
{v}_{0}} \\ {
{a}_{2}}&=& \frac{3h-\left( 2{
{v}_{0}}+{
{v}_{1}} \right)T}{
{
{T}^{2}}} \\ {
{a}_{3}}&=& \frac{-2h+\left( {
{v}_{0}}+{
{v}_{1}} \right)T}{
{
{T}^{3}}} \\ \end{matrix} \end{cases} \tag{1-22} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧a0a1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
























 到【灌水乐园】发言
到【灌水乐园】发言









