




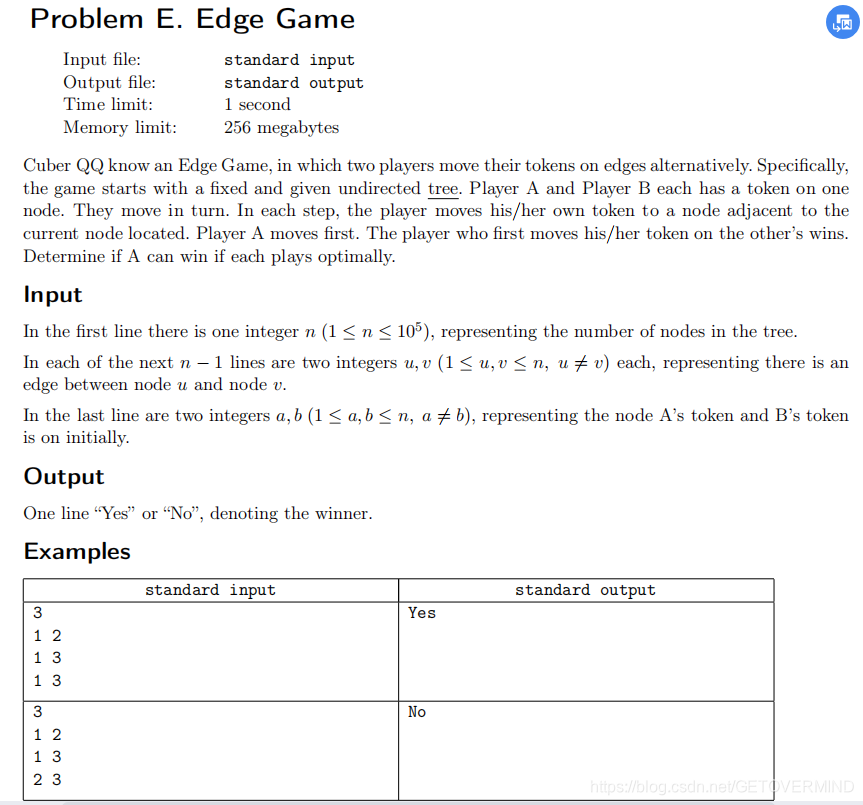
这题就是找树上两个点之间的距离,然后这距离是奇数就输出Yes,是偶数就输出No。可以用链式前向星+队列优化的Dijkstra解决,至于队列优化的Dijkstra算法时间复杂度好像是O(nlogn+m),但是其原理我还理解的不够透彻,等以后理解透彻后再对这篇博客进行修改。
下面直接放代码:
#include<iostream>
#include<cstring>
#include<algorithm>
#include<queue>
#include<vector>
using namespace std;
//-----------------------------链式前向星的准备工作-----------------------------------
struct edge{
int next;//上个以这条边为起点的边在存放边的数组中的位置(方便遍历)
int to;//终点
int w;//边权
}dat[200005];//存放边的结构体(无向边大小要开2倍)
int cnt=1;//这是遍历存放边的数组用的,同时也记录着边的数量
int head[200005];//head[u]表示以u为起点的第一条边(这里第一条指的是链式结构的头)在存放边的数组中的位置 ,无向边大小要开二倍
void add(int u,int v,int w)//加边函数
{
dat[cnt].w=w;//存放边权
dat[cnt].to=v;//存放终点
dat[cnt].next=head[u];//当前边指向上一条同起点的边
head[u]=cnt++;//改变头结点为当前边(方便以后遍历)
}
//------------------------------------------------------------------------------------
//-------------------------------Dijkstra(单调队列优化)的准备工作-----------------------------------
const int inf = 0x3f3f3f3f;
int dis[100005];
struct cmpx
{
bool operator() (int &a,int &b) const
{
return dis[a]>dis[b];
}
};//优先队列的排序方式
//------------------------------------------------------------------------------------
void Dijkstra(int x)
{
priority_queue<int,vector<int>,cmpx > q;
memset(dis,0x3f,sizeof(dis));//刚开始x到各点的最短距离都不确定,全部初始化为inf
dis[x]=0;//自己到自己的最小距离是0
q.push(x);//确定最小距离的点扔进优先队列中
while(!q.empty())//队列不为空说明还有点没有确定最小距离,就要继续进行循环
{
int u=q.top();//用队首的点松弛其它与其相邻的边?
q.pop();//出列代表我准备用它松弛了其它与其相邻的边?
for(int k=head[u];k!=0;k=dat[k].next)//遍历与队首相连的边
{
int v=dat[k].to;
if(dis[v]>dis[u]+dat[k].w)
{
dis[v]=dis[u]+dat[k].w;//能松弛就更新
q.push(v);//然后把被松弛的边的终点扔进优先队列中
}
}
}
}
int main()
{
int n,a,b;
cin>>n;
for(int i=1;i<n;++i)
{
cin>>a>>b;
add(a,b,1);
add(b,a,1);//无向边
}
cin>>a>>b;
Dijkstra(a);
if(dis[b]%2==1) cout<<"Yes"<<endl;
else cout<<"No"<<endl;
return 0;
}

















 1675
1675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









