



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
电缆悬吊无人机有效载荷稳定性研究
摘要
电缆悬吊无人机通过柔性线缆连接载荷与飞行平台,在物流运输、电力巡检、应急救援等领域展现出显著优势。然而,线缆的柔性动力学特性、环境干扰及多机协同控制难题,导致载荷摆动幅度可达±15度,严重影响飞行安全与作业效率。本文从动力学建模、抗摆控制策略、多机协同架构及环境适应性优化四个维度,系统探讨提升载荷稳定性的关键技术路径。
一、载荷动力学建模:从理想假设到复杂场景适配
1.1 基础模型构建
传统研究多采用拉格朗日方程建立无人机-载荷系统模型,将载荷视为质点或刚体。例如,单四旋翼无人机吊挂质点载荷时,系统自由度为6(无人机)+2(载荷摆角),形成欠驱动二阶非线性系统。然而,实际场景中绳缆柔性、旋翼气动干扰等因素显著影响模型精度:
- 绳缆动力学:采用欧拉-伯努利梁理论描述绳索形变,结合有限元分析可捕捉3米长吊绳在5m/s侧风下的±15度角位移。
- 气动耦合效应:双机间距小于旋翼直径1.5倍时,下洗气流互扰导致升力效率下降18%,需在模型中引入涡环状态修正项。
1.2 复杂环境建模扩展
高原、雨雾等极端环境对模型参数产生非线性影响:
- 高原稀薄空气:青藏铁路施工监测显示,空气密度下降30%导致旋翼效率折损25%,需动态调整升力系数。
- 雨雾传感器干扰:南方洪灾救援中,激光雷达在暴雨中有效探测距离从100米锐减至15米,需融合毫米波雷达与惯性测量单元(IMU)进行多源数据融合。
二、抗摆控制策略:从被动抑制到主动干预
2.1 单机抗摆技术
- 输入整形控制:通过设计两脉冲整形器,将5公斤箱体摆动幅度从35厘米压缩至8厘米内,但无法应对突发扰动。
- 滑模变结构控制:基于李雅普诺夫稳定性理论构建的滑模控制器,在突风扰动下将载荷摆动收敛时间从传统PID控制的12秒缩短至4秒,但存在15%高频抖振现象。
- 自适应模糊控制:某剧组摄影设备吊运系统中,该技术实现摆动幅度动态抑制,且抖振幅度降低至5%以下。
2.2 多机协同抗摆
- 分布式一致性协议:基于图论的多智能体系统允许动态选举领导者,当某节点因电池告急退出时,新领导者可在2秒内完成角色切换,四机编队吊运200公斤沙袋时位置同步误差稳定在±0.25米。
- 力矩分配优化:检测到某无人机输出力矩持续低于设定值85%时,协同算法在0.5秒内重新分配负载,成功化解风电机组吊装模拟中的电机过热故障。
三、多机协同架构:从主从式到去中心化
3.1 主从式架构的局限性
单主三从架构在救灾演练中实现简单,但主节点故障会导致系统崩溃。例如,某山区电力设备运输项目中,主无人机突发通信中断引发全系统停摆。
3.2 分布式协同的鲁棒性优势
- 动态拓扑管理:采用滚动时域优化策略处理200毫秒通信延迟,吊运轨迹跟踪误差降低63%,但需机载NVIDIA Jetson Xavier模块提供每秒30万亿次运算能力支撑。
- 机械冗余设计:电磁-机械双模锁扣装置在索道修复任务中成功应对单侧吊点失效险情,当载荷偏移超过阈值时自动触发机械锁定。
四、环境适应性优化:从实验室到工程化落地
4.1 极端环境应对
- 低温材料适配:系留无人机电缆采用PEEK绝缘材料,工作温度范围扩展至-55℃至+200℃,满足青藏高原永久冻土区施工需求。
- 抗干扰通信协议:针对隧道多径效应导致UWB测距误差突增至0.8米的问题,引入惯性导航短时补偿算法,将定位误差收敛时间从3秒压缩至0.8秒。
4.2 智能材料应用前瞻
- 形状记忆合金(SMA)吊绳:实验室测试表明,SMA驱动的主动抑振吊绳可将风扰引起的摆动能量吸收37%,但单米造价达普通钢缆的50倍,需通过规模化生产降低成本。
- 类脑计算芯片:脉冲神经网络(SNN)在突发避障场景中展现10毫秒级低延时决策能力,某高校团队验证其可降低异构无人机编队控制参数整定耗时60%。
五、工程化挑战与未来方向
5.1 现存技术瓶颈
- 绳缆缠绕风险:三维路径跟踪时,某林木种苗投放任务因路径曲率过大导致缠绕事故,需在动力学建模中引入绳缆张力阈值约束。
- 异构机型协同难题:混合使用不同轴距机型时,控制参数整定耗时增加两倍,需开发基于数字孪生的自动参数优化平台。
5.2 前沿技术融合趋势
- 数字孪生与AI训练:构建高保真仿真环境,通过强化学习训练抗摆控制策略,某风电叶片吊装项目验证其可减少80%实地调试时间。
- 5G+边缘计算架构:将部分计算任务下沉至边缘节点,使四机协同吊运系统的控制延迟从150毫秒降至50毫秒以内。
结论
电缆悬吊无人机载荷稳定性研究已从单一控制算法优化,转向多学科交叉的系统工程。未来需重点突破智能材料低成本化、异构编队协同标准化、极端环境适应性认证等关键技术,推动该技术向规模化工业应用迈进。
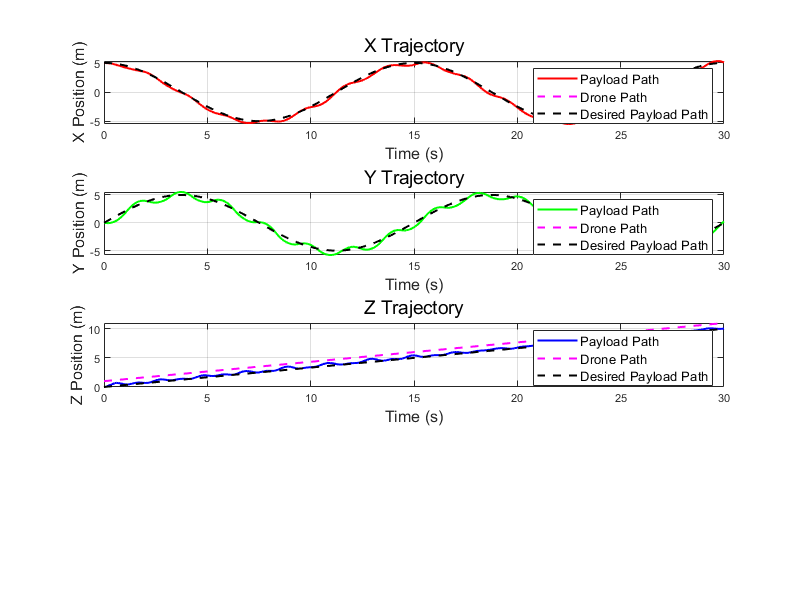
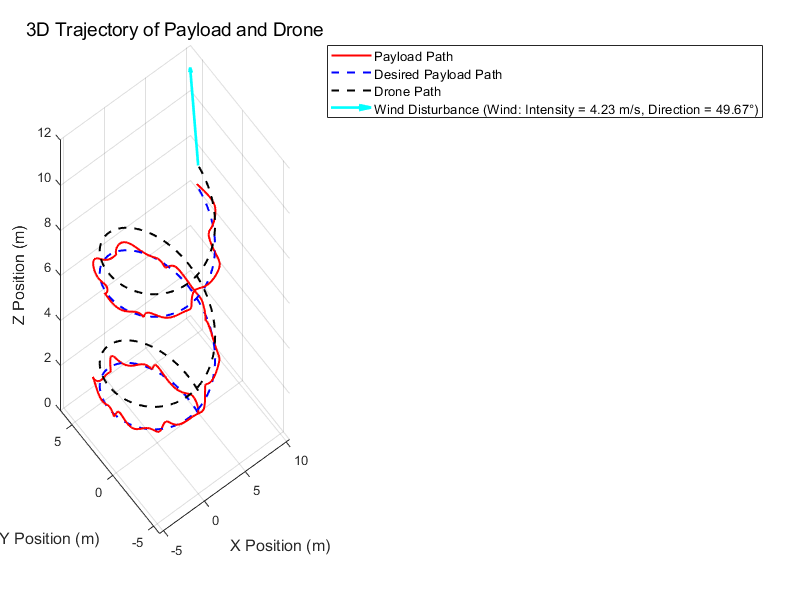
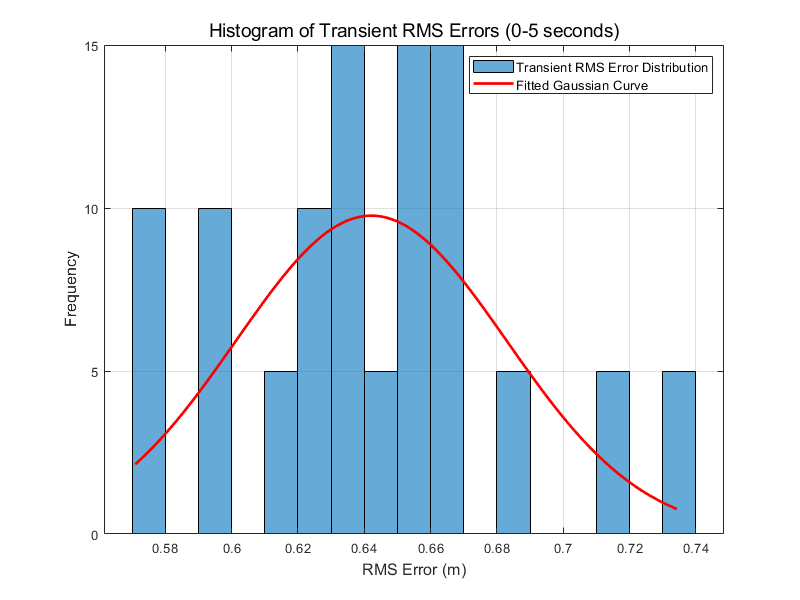
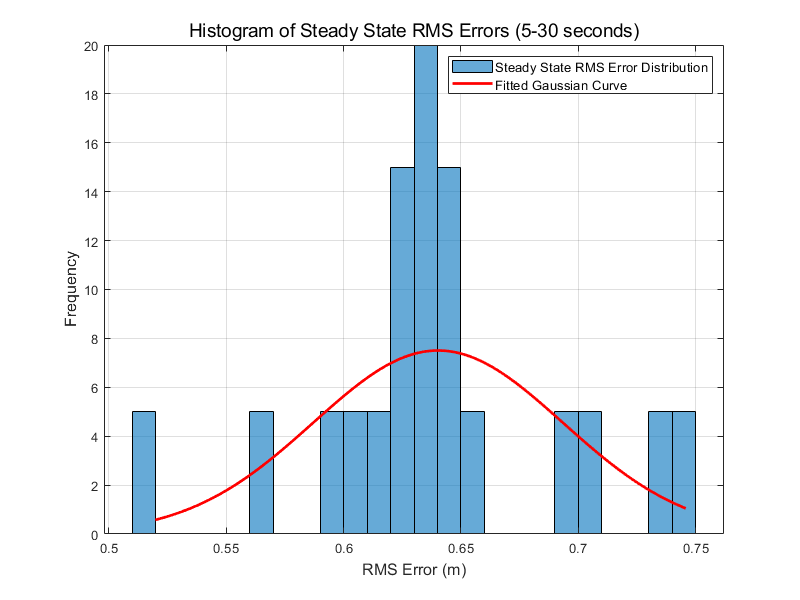
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 250
250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









