



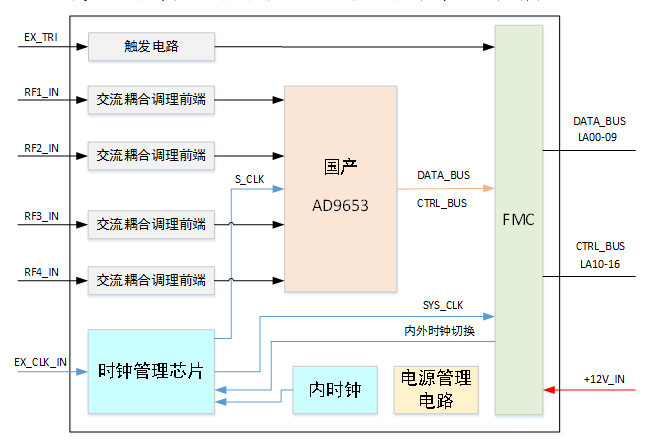
该子卡为100%全国产化基于FMC标准设计,实现4路16bit/125MSPS ADC采集功能,遵循 VITA 57 标准,子卡可以直接与符合FMC规范的 FPGA 载板连接使用。子卡 ADC 器件支持多款国产AD9653芯片,用户可以通过 FMC 接口配置芯片工作状态。
该板卡ADC采集通道的实测采集指标信噪比(SNR)和无杂散动态范围(SFDR)可对标进口AD9653,可实现优异的采集性能。原理框图如下图所示:
性能指标:
|
板卡功能 |
参数内容 |
参数指标 | |
|
ADC |
芯片型号 |
国产AD9653 | |
|
采集通道数 |
4路ADC采集通道 | ||
|
采样率 |
125MSPS | ||
|
采集精度 |
16bit | ||
|
数字接口 |
DDR LVDS | ||
|
模拟接口 |
交流耦合 | ||
|
模拟输入 |
2.0Vpp-2.6Vpp可配置 | ||
|
模拟采集指标 |
见第5节实测指标介绍 | ||
|
DAC |
无 |
无 | |
|
时钟 |
时钟管理芯片 | ||
|
板载晶振 |
20-125MHz高精度晶振 | ||
|
外输入时钟 |
1路20-125MHz高精度时钟源 | ||
|
外触发 |
路数 |
1路输入 | |
|
电平 |
兼容1.8V/2.5V/3.3V LVTTL电平 | ||
|
连机器类型 |
FMC-HPC |
ASP-134488-01 | |
|
前面板 |
6路SSMC | ||
|
板卡标准 |
FMC ANSI/VITA 57.1 - 2008 | ||
|
板卡尺寸 |
84mm*69mm | ||
|
板卡重量 |
含散热片 | ||
|
板卡供电 |
+12V@1A | ||
|
板卡功耗 |
6W | ||
|
工作温度 |
Industrial -40°C到+85°C | ||
|
支持母板 |
Xilinx board |
V6、V7、KU、VU、 ZYNQ、ZU 开发板 | |
|
其他符合FMC引脚信号定义规范的FPGA载板 | |||
软件内容
提供Vivado及国产开发版本的数&控驱动程序。
板卡应用
板卡配置FPGA母板用于模拟信号、无线电、光电、雷达的采集场景。
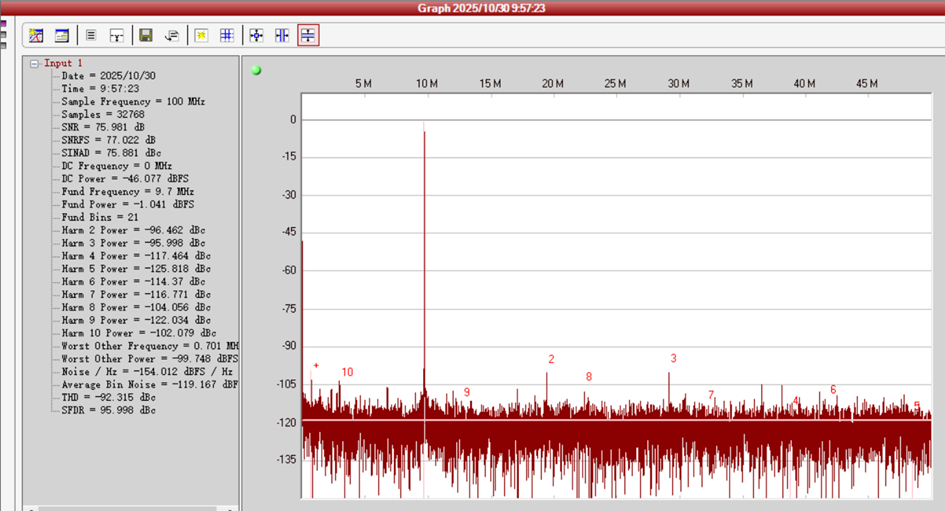
板卡实测记录
板卡ADC采集指标SNR和SFDR实测记录如下表所示:
|
测试条件:SMA100A、-1dBFS、点频LC滤波器、32768样点,采样率100MSPS | |||||
|
2.0VPP |
手册标称值 |
2.6VPP |
手册标称值 | ||
|
SNR |
9.7MHz |
77 |
78 |
78.8 |
80 |
|
15.1MHz |
77.1 |
77.8 |
79 |
79.4 | |
|
70.1MHz |
75.2 |
75.5 76.5 |
76.2 |
77.5 | |
|
SFDR |
9.7MHz |
95.9 |
96 |
90.1 |
94 |
|
15.1MHz |
98.8 |
93 |
96.5 |
94 | |
|
70.1MHz |
86.5 |
89 78 |
80.7 |
82 | |

















 420
420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









