



高速图像采集记录仪
最高存储速率3.2GB/s, Cameralink 接入,
最高容量 16TB
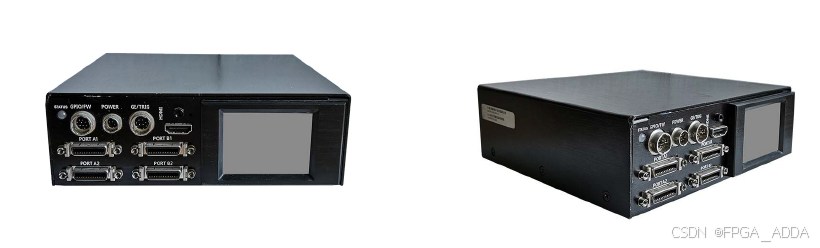
高速图像采集记录仪是一款用于高速工业相机数据记录的设备,它可以实现高速相机数据的记录、回播、模拟和仿真等功能。紧凑的尺寸、可高靠性的设计,使它特别适合单兵装备、车载、无人机载、有人机载、舰载、弹载或星载类的强固型便携式高性能大容量高速图像应用场合。尽管拥有小巧尺寸,但是超高存储速率和超大容量,使它具有超越预期的性能。
主要规格
- 4 路标准 CameraLink MDR 输入
- 4 个 Base
- 或 2 个 Medium/Full/80Bit CameraLink 相机输入
- 2 个标准的 40Gbps QSFP+ 光口输入
- 可转化成 8 个标准的 10Gbps SFP+ 光口
- 支持单模和多模
- 存储速率可达 3.5GB/s(8 片 SSD)
- 最大存储容量可达 16TB
- 支持两路 CameraLink 相机仿真功能
- 历史数据导入 , 可配置根据录制的图像仿真相机的输出
- 支持两组 (Base/Medium/Full/80Bit) 同时仿真输出
- 或者一组 (Base/ Medium/Full/80Bit) 数据采集加一组(Base/Medium/Full/80Bit) 仿真输出
- 2 个符合 SAS 2.0 标准规范的快速数据导出接口
- 可以转化成 8 个标准的 SATA III 接口
- 升级后可支持触屏输入、记录控制和状态显示,记录仪可脱离上位机单独使用
- 设备支持在线快导 , 升级后存储模块支持快速更换和拔出后单独快导。
- 纯导冷无风扇设计
- -40~55°C 纯被动无风流宽温工作范围
- 加导热或风流更耐高温
控制监测功能主要有:文件路径选择、采集容量或记录时间设置,采集开始及停止控制,文件删除,锁定等采集过程监测等。
价值
- 超便携高速图像采集记录仪,<1.5kg;
- 高性能,可达 3.5GB/s;
- 大容量;
- 宽电压输入,可使用车载或机载的供电系统;
- 坚固型设计;
- 纯导冷散热 : 纯导冷无风扇设计。
- 支持集群;
- 可适配多种类相机输出接口
- 支持多种控制接口 : 支持 RS232,RS422,GE,GPIO 口控制;升级后可支持触摸屏控制
- 数据快速导出
- 升级后可用做模拟器或者仿真器
- 维护性好
- 数据异常恢复功能。
采用业内最紧凑的 8 盘位标准 2.5 吋磁盘结构设计, 单机设备仅有两个手机平铺大小,重量小于 1.5Kg。业内最大的性能体积比和性能重量比。体积小巧,部署灵活方便。 是便携应用场合、嵌入式集成应用的理想之选。
开发环境
系统配套软件支持 windows7 操作系统开发环境。控制软件开发支持如下:
- FPGA 开发软件:Vivado 2013.2;
- FPGA 开发工具:Platform Cable USB;
- 上位机软件: CVI 9.0/QT/VC 等;
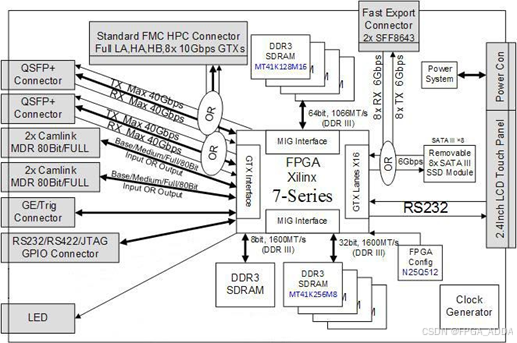
多种数据输入 / 输出接口
标配 2 个 QSFP+ 光口(支持 SRIO,Aurora,10GE 等协议) 和 4 个MDR Camlink 接口。通过预留的标准FMC 子卡接口, 可配接各种标准 FMC AD 子卡, 实现 SFP+,CoaxPress, 3G-SDI,CLHS/HS-Link 等各种接口输入输出。
多种控制接口
支持 RS232,RS422,GE 和 GPIO 口控制,升级后可实现按钮和触摸屏控制。
设计规范
坚固型设计 : 坚固型结构设计和全加固型的连接器选型,满足国军标 GJB150.16 和 GJB3493 规范的振动和冲击应用的要求。纯导冷散热 : 纯导冷无风扇设计,全工业级物料,‐40~55°C 纯被动无风流宽温工作范围,可靠性和耐用性高。
性能指标(一)
每台 记录仪坚固型纯导冷嵌入式超高速大容量图像 / 雷达数据记录仪包含 2 组背板 SRIO x4 数据 /8 路背板 Rocket IO 数据输入,符合标准 SRIO 速率为 3.125G,预留 6.25G 的支持。实际记录带宽 >=1.6GB/s,最大支持 3.8GB/s;另外系统还支持以下功能。
- 文件管理功能:格式化、删除、读取文件列表、导入文件、导出文件(支持数据片导出,文件起始 + 偏移量 + 导出数据长度),支持上位机软件控制
- 监控功能:板卡温度监控、控制器温度监控、FLASH 温度监控
- 控制功能:开始记录、停止记录、开始上传、停止上传、开始加载、停止加载、上传进度监控、加载进度监控
- 提供文件管理功能
- 支持记录特定数据大小文件(也可以不限制),记满后自动停止
其他要求:
- 支持网络断开重连,且不中断或影响数据记录功能;
- 数据记录满后可自动停止;
- 提供板卡与远程控制软件之间接口及流程时序约束,满足其他软件直接控制板卡;
- 提供方案设计与接口约束

















 1317
1317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









