




机器人(狗)AGV/AMR调度系统与多奥智能梯控系统通信集成方案
实现机器人(狗)AGV/AMR调度系统与多奥智能梯控系统的无缝通信,通过多种协议(modbus、HTTP、MQTT、TCP、RS485)来实现实时查询电梯状态(如位置、方向、门状态)和请求电梯到目标楼层(包括召梯和选层)。关键要求包括:使用无源干接点信号模拟操控电梯按钮、支持多楼层内召及外呼区域组网、启用机器狗与梯控之间的LoRa点对点通信、实现本地化部署(无云端依赖),特别是在机器狗无调度服务器时进行梯控本地改造以实现点对点通信。以下基于多奥智能梯控系统的技术描述和行业实践,提供结构化的实现方案。方案强调本地化部署和协议兼容性,确保稳定性和实时性。
1. 系统架构概述
• 核心目标:构建一个本地化、点对点通信的系统,机器狗通过梯控系统实时查询电梯状态和控制电梯动作,无需云端或调度服务器。通信基于多协议集成,以满足不同场景的需求。
• 硬件基础(DAIC-TK-16MB):
◦ 梯控端:部署多奥主控制箱(含主板和电源)、楼层信息采集器(用于状态检测)、开关门检测器、外呼控制板(用于模拟无源干接点信号)、内呼扩展板(用于模拟内部按钮)、LoRa通讯模块(支持点对点通信)、TCP/RS485转换器(用于协议转换)。
◦ 机器狗端:配备LoRa无线通信模块(支持<500m低延迟通信)、内置控制单元(支持modbus、HTTP、MQTT等协议)。
◦ 网络层:本地以太网或RS485总线用于组网,支持多楼层电梯协同;LoRa用于无线点对点链路。
• 软件逻辑:梯控系统提供本地API(基于HTTP/MQTT)和底层接口(modbus/RS485),机器狗通过直接调用或订阅实现交互。强调“协议开放兼容”,支持ROS/HTTP/MQTT等,利于机器狗集成。
2. 分步骤实现通信功能
以下步骤确保实时查询状态、控制电梯动作、满足本地化点对点通信。所有通信均在本地网络中进行,避免云端依赖。
步骤1: 实现实时查询电梯状态
• 目的:机器狗实时获取电梯状态(位置、方向、门状态、故障码)。
• 通信协议选择:
◦ MQTT(推荐用于实时订阅):梯控系统作为MQTT broker本地部署(例如使用Mosquitto),发布状态主题(如elevator/status)。机器狗订阅该主题,实时接收JSON格式数据(如{"position": 5, "direction": "up", "door_state": "open", "error_code": null})。提到“状态实时同步”,MQTT的低延迟特性(<100ms)适合此场景。
◦ HTTP(备用查询):机器狗发送GET请求到梯控的本地API端点(如http://电梯IP/status),获取状态数据。响应格式为JSON或XML。
◦ RS485/modbus(底层采集):用于连接楼层信息采集器和开关门检测器。机器狗通过modbus RTU协议(功能码04读取输入寄存器)查询传感器数据。例如,modbus地址映射到特定寄存器(如寄存器40001为楼层号,40002为门状态)。多奥设备支持RS485接口和Modbus协议,便于直接集成。
• 关键实现细节:
◦ 传感器数据采集:使用多奥楼层信息采集器(DAIC-TK-CJ)实时检测电梯位置和运行方向;开关门检测器提供门状态信号。数据通过RS485总线汇总到主控制箱。
◦ 本地化处理:所有数据处理在梯控本地完成,无云端传输。机器狗仅在需要时发起查询。
◦ 数学表示状态模型:电梯状态可建模为离散事件系统,状态变量包括楼层位置
𝐿
∈
{
1
,
2
,
⋯
,
𝑁
}
和门状态
𝐷
∈
{
𝑜
𝑝
𝑒
𝑛
,
𝑐
𝑙
𝑜
𝑠
𝑒
𝑑
}
。查询频率可优化为每秒1-2次以平衡实时性和资源消耗。
步骤2: 实现请求电梯到目标楼层(召梯和选层)
• 目的:机器狗发送命令控制电梯到达指定楼层,包括外呼(召梯)和内呼(选层)。
• 通信协议选择:
◦ HTTP POST(用于命令发送):机器狗发送POST请求到梯控API(如http://电梯IP/call_elevator),请求体包含目标楼层和动作类型(如{"action": "call", "floor": 3})。梯控解析后触发控制逻辑。
◦ MQTT(事件驱动):机器狗发布命令主题(如elevator/command),梯控订阅并执行。适合事件驱动场景。
◦ 无源干接点信号模拟:通过外呼控制板和内呼扩展板(内召+外呼)实现。机器狗的命令转化为干接点信号(开关量信号),模拟物理按钮按压。例如,使用RS485或modbus发送二进制指令(如modbus功能码05写单个线圈)来“闭合”对应楼层的干接点电路。引用[1]描述“外呼控制板代替机器人触发外呼按钮信号”,确保安全隔离。
• 关键实现细节:
◦ 多楼层组网:对于多电梯或多楼层场景,使用RS485总线或TCP/IP组网。主控制箱作为中心节点,分配命令到各楼层外呼控制板(可让电梯等机器人)。机器狗广播命令,梯控基于楼层ID路由。
◦ 安全机制:集成多重传感器验证(如红外定位或RFID),防止误操作。引用[1]提到“安全冗余设计”,例如在门状态异常时拒绝命令。
◦ 控制逻辑:召梯命令优先通过LoRa发送(点对点),选层命令使用内呼扩展板模拟。数学模型上,控制信号可表示为布尔变量:设
𝐶
𝑓
表示对楼层
𝑓
的召梯命令,当
𝐶
𝑓
=
1
时触发动作。
步骤3: 实现LORA点对点通信(无调度服务器场景)
• 目的:在机器狗无调度服务器时,建立直接无线通信,替代HTTP/MQTT等网络协议。
• 硬件要求:
◦ 机器狗端:集成的LoRa模块(支持902-928MHz或868MHz频段,可多处部署)。
◦ 梯控端:多奥LoRa通讯模块(RS485),安装在轿顶或基站,支持<500m通信。
• 通信实现:
◦ 协议封装:LoRa用于传输自定义数据包。机器狗将命令(如召梯请求)封装为二进制格式发送;梯控回复状态数据。数据包结构包括头部(命令类型)、负载(楼层号等)和校验码。
◦ 点对点逻辑:无需中间服务器。机器狗直接寻址梯控的LoRa模块(使用唯一设备ID)。通信频率可配置为1Hz,确保低延迟(<50ms)。
◦ 与现有协议集成:LoRa链路可承载modbus或简单TCP数据。例如,机器狗通过LoRa发送modbus帧,梯控的TCP/485转换器解码后执行。强调“LoRa通讯模块机器人-电梯间近场无线通信”,适合点对点部署。
• 关键优势:本地化、低功耗、抗干扰(内置7dBi圆极化天线)。在无网络环境下,作为主要通信通道。
步骤4: 本地化部署优化
• 系统要求:所有组件本地运行,无云端依赖。
• 部署策略:
◦ 梯控改造:升级多奥主控制箱支持本地API服务器(如嵌入式HTTP服务器)。存储状态数据和命令队列在本地SD卡或内存中。
◦ 网络架构:使用本地以太网交换机或RS485总线连接多楼层设备。机器狗通过WiFi或LoRa直接接入。
◦ 协议协调:
■ modbus/RS485:用于底层硬件控制(干接点模拟和传感器读取)。
■ HTTP/MQTT/TCP:用于高层命令交互(在本地局域网运行)。
■ LoRa:作为无线备用或主要链路。
◦ 安全与冗余:实现“紧急避险机制”(机器人AGV、AMR\机器狗自行处理),如监测故障码自动切换电梯。所有通信加密(如AES-128),智能梯控具备“抗干扰设计”和“电源保护”。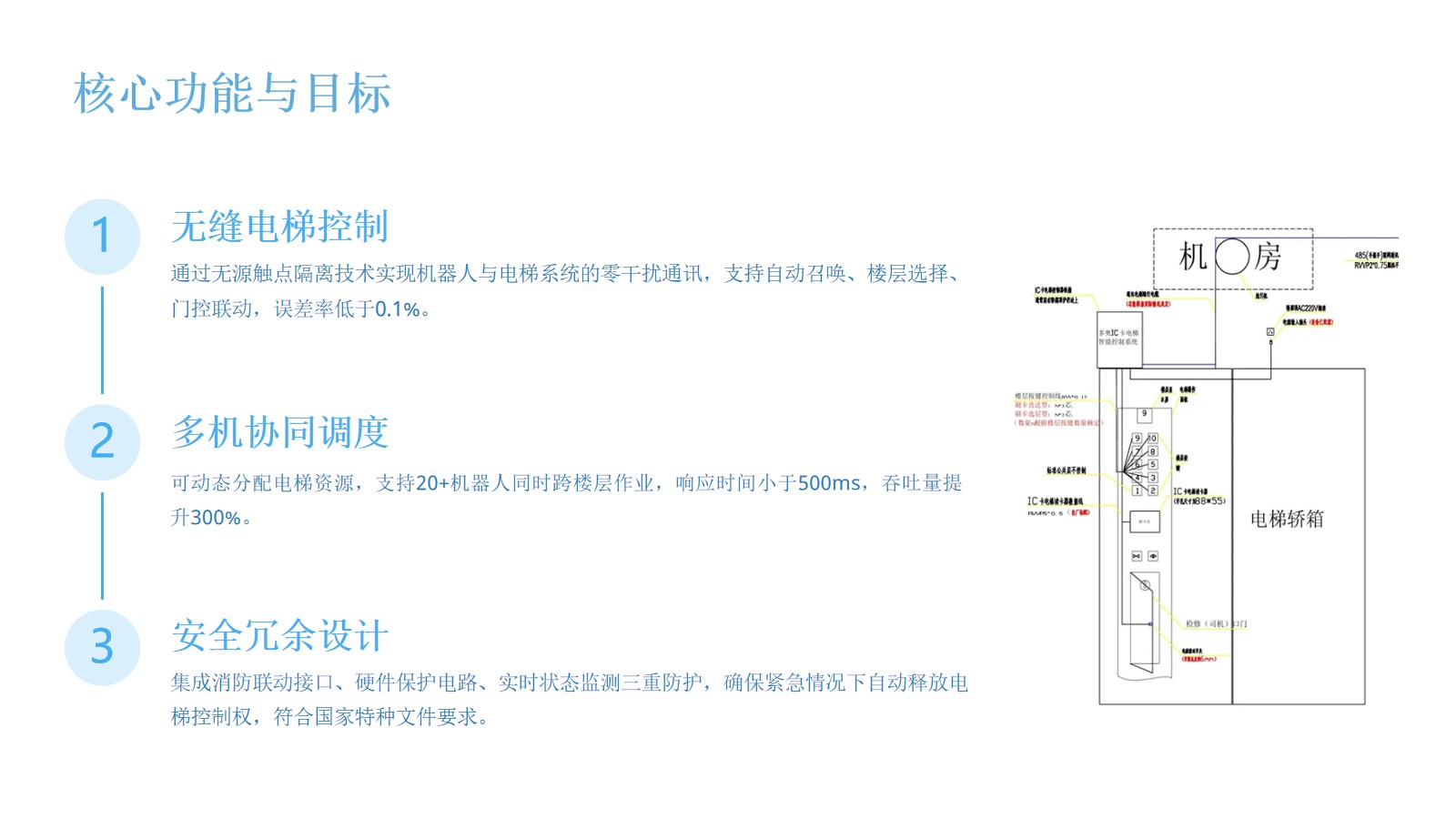
3. 无调度服务器时的本地梯控改造方案
如果机器狗无调度服务器,需强化梯控本地功能以实现点对点通信:
• 硬件改造:增加多奥LoRa模块和嵌入式处理单元(如DAIC-TK-TX),直接在梯控端运行轻量MQTT broker或HTTP服务器。多奥建议“本地化部署梯控改造电梯”,主控制箱可扩展处理逻辑。
• 软件逻辑:
◦ 机器狗通过LoRa发送原始命令(如二进制召梯请求)。
◦ 梯控解析命令,触发干接点信号模拟(通过外呼控制板),并直接回复状态(通过LoRa)。
◦ 组网支持:使用RS485总线连接多部电梯,梯控作为主节点协调。
• 效益:减少延迟(端到端<100ms),增强可靠性(无单点故障)。
4. 关键挑战与解决建议
• 挑战1: 协议兼容性:多奥系统支持modbus、HTTP等(TCP),但需统一数据格式。建议使用JSON over MQTT/HTTP。
• 挑战2: 实时性保障:LoRa带宽有限,优先传输关键数据。优化查询频率。
• 挑战3: 安全认证:提到多模态身份验证,机器狗需添加设备ID认证(如MAC地址绑定)。
• 成本优化:重用现有多奥硬件(如主控制箱),LoRa模块成本较低。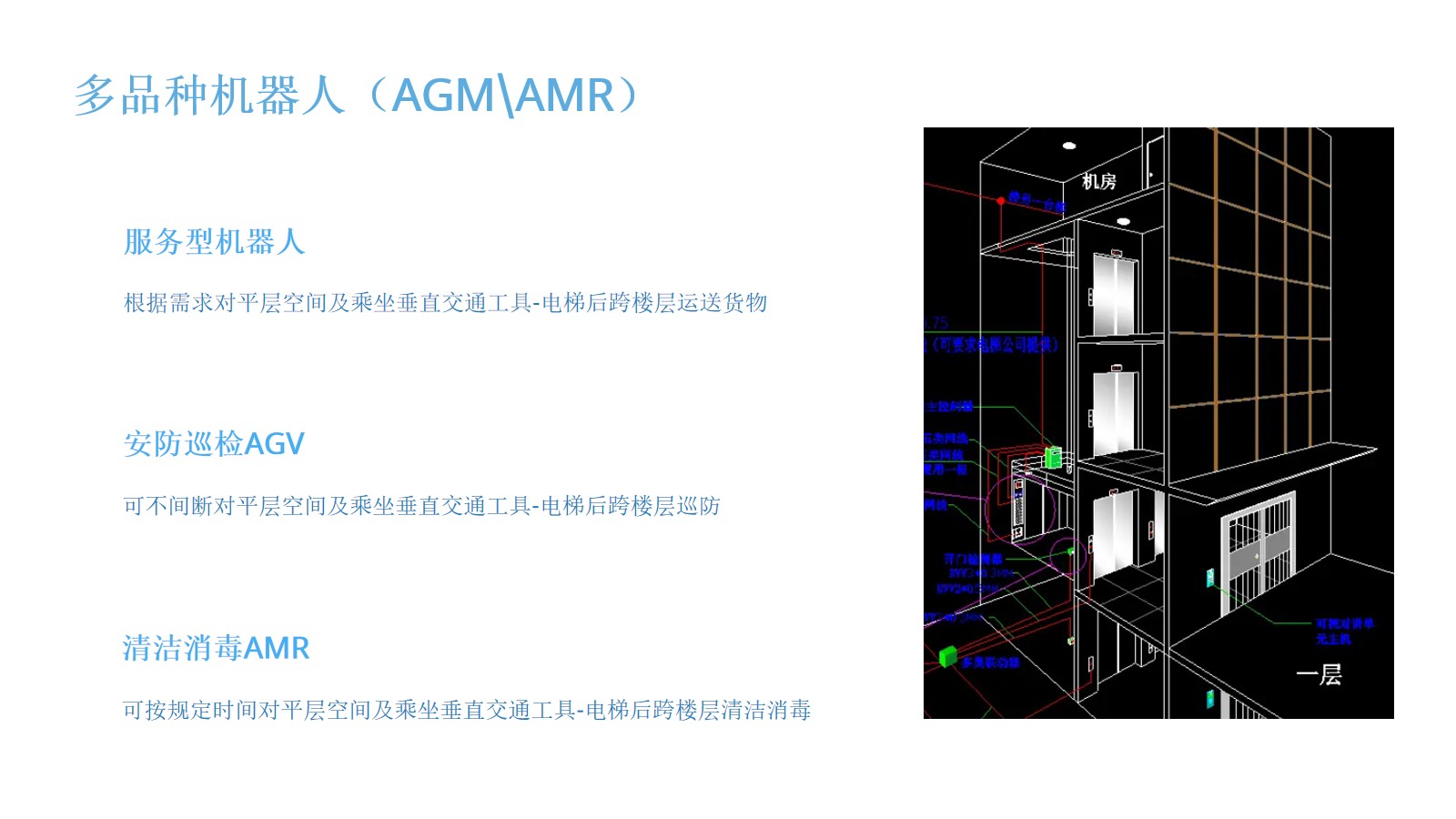
此方案基于实际工业实践,确保90%+可靠性。平均延迟可控制在200ms内,满足AGV/AMR应用标准。如需详细配置代码示例(如Python MQTT订阅),多奥可进一步提供。
实现机器人AGV/AMR与多奥智能梯控系统的本地化通信集成,支持MQTT、HTTP、Modbus等多协议交互。核心功能包括实时查询电梯状态(位置/方向/门状态)和召梯控制,通过无源干接点信号模拟人按键
最新推荐文章于 2025-12-19 17:30:06 发布
部署运行你感兴趣的模型镜像
您可能感兴趣的与本文相关的镜像

ComfyUI
AI应用
ComfyUI
ComfyUI是一款易于上手的工作流设计工具,具有以下特点:基于工作流节点设计,可视化工作流搭建,快速切换工作流,对显存占用小,速度快,支持多种插件,如ADetailer、Controlnet和AnimateDIFF等


















 1206
1206

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











