




GPIO寄存器
每个GPI/O端口有两个32位配置寄存器(GPIOx_CRL,GPIOx_CRH),两个32位数据寄存器(GPIOx_IDR和GPIOx_ODR),一个32位置位/复位寄存器(GPIOx_BSRR),一个16位复位寄存器(GPIOx_BRR)和一个32位锁定寄存器(GPIOx_LCKR)。
GPIOx_CRL,GPIOx_CRH
寄存器作用
GPIOx_CRL(Port Configuration Register Low)用于配置 GPIO 端口低位引脚(Pin 0 ~ Pin 7) 的工作模式与输出特性,GPIOx_CRH(Port Configuration Register High)用于配置 GPIO 端口高位引脚(Pin 8 ~ Pin 15) 的工作模式与输出特性,每个引脚占用 4 个二进制位(共 32 位,控制 8 个引脚)。高位引脚(Pin 8 ~ Pin 15)的配置由 GPIOx_CRH 寄存器完成。
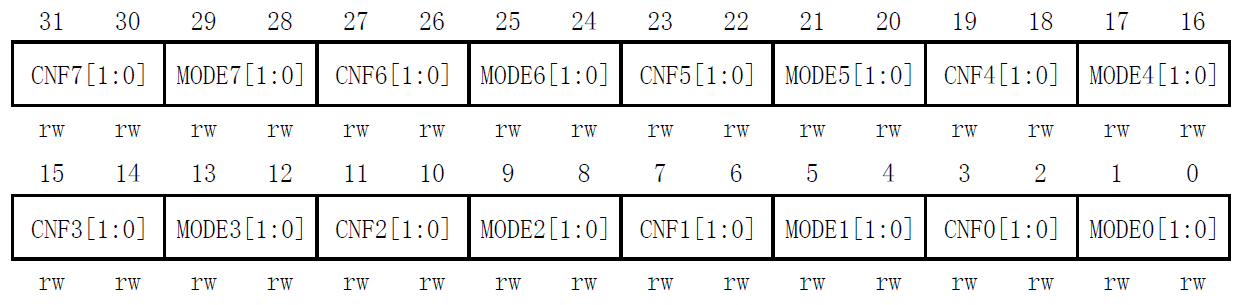
偏移地址:0x04 复位值:0x4444 4444
寄存器结构
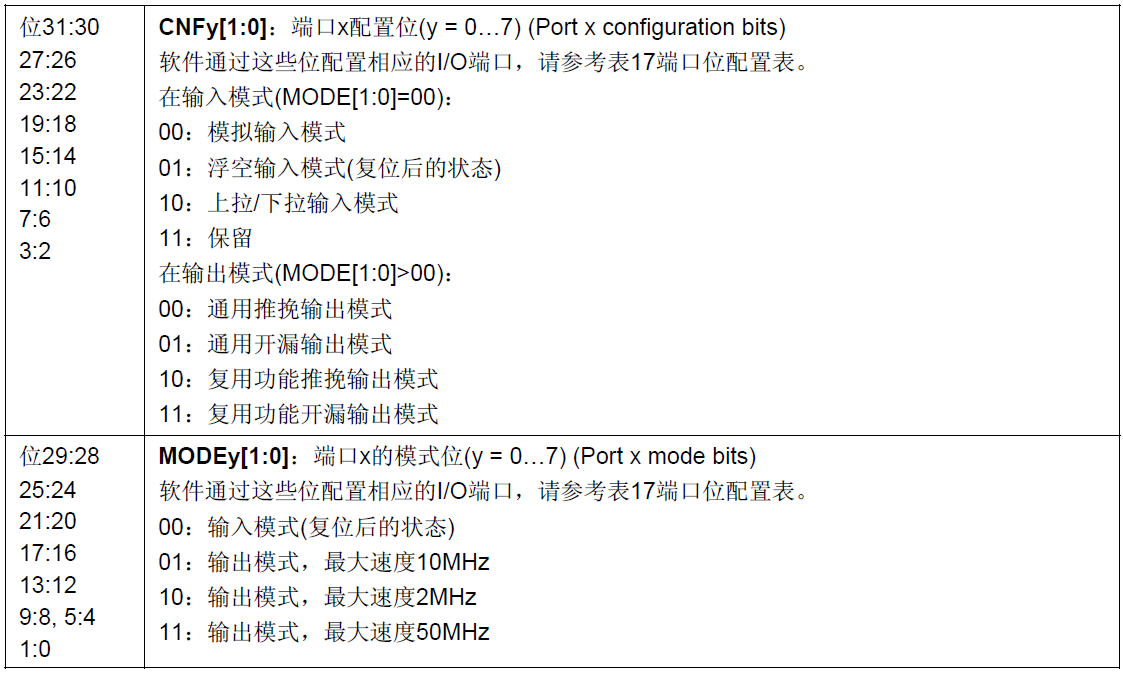
每个引脚由 CNFy[1:0]和 MODEy[1:0]字段控制,其中 y 表示引脚号(0~7)。
例如,Pin 0 对应 CNF0[1:0] 和 MODE0[1:0],Pin 1 对应 CNF1[1:0] 和 MODE1[1:0],依此类推。
配置模式详解
例1
浮空输入(Floating Input)设置PA0为浮空输入,寄存器操作如下
// 配置 PA0 为浮空输入(模式:输入,配置:浮空)
GPIOA->CRL &= ~(0x0F << 0*4); // 清除PA0原有配置
GPIOA->CRL |= (0x04 << 0*4); // CNF[1:0]=01(浮空输入), MODE[1:0]=00(输入模式)CNF[1:0] = 01(浮空输入)-
MODE[1:0] = 00(输入模式)
例2
上拉输入(Pull-Up Input)设置PA1为上拉输入,寄存器操作如下
// 配置 PA1 为上拉输入
GPIOA->CRL &= ~(0x0F << 1*4); // 清除PA1原有配置
GPIOA->CRL |= (0x08 << 1*4); // CNF[1:0]=10(上拉/下拉输入), MODE=00
GPIOA->ODR |= (1 << 1); // 使能上拉(ODR对应位写1)-
CNF[1:0] = 10(上拉/下拉输入) -
MODE[1:0] = 00(输入模式) -
注意:需通过
ODR寄存器设置上拉(1)或下拉(0)。
例3
推挽输出(Push-Pull Output)设置PA2为推挽输出,最大速度10MHz
// 配置 PA2 为推挽输出,最大速度10MHz
GPIOA->CRL &= ~(0x0F << 2*4); // 清除PA2原有配置
GPIOA->CRL |= (0x01 << 2*4); // CNF[1:0]=00(推挽输出), MODE=01(10MHz)-
CNF[1:0] = 00(推挽输出) -
MODE[1:0] = 01(最大速度10MHz,可选10(2MHz)、11(50MHz))
例4
开漏输出(Open-Drain Output)设置PA3为开漏输出,最大速度50MHz
// 配置 PA3 为开漏输出,最大速度50MHz
GPIOA->CRL &= ~(0x0F << 3*4); // 清除PA3原有配置
GPIOA->CRL |= (0x0C << 3*4); // CNF[1:0]=01(开漏输出), MODE=11(50MHz)-
CNF[1:0] = 01(开漏输出) -
MODE[1:0] = 11(50MHz)
GPIOx_IDR
寄存器作用
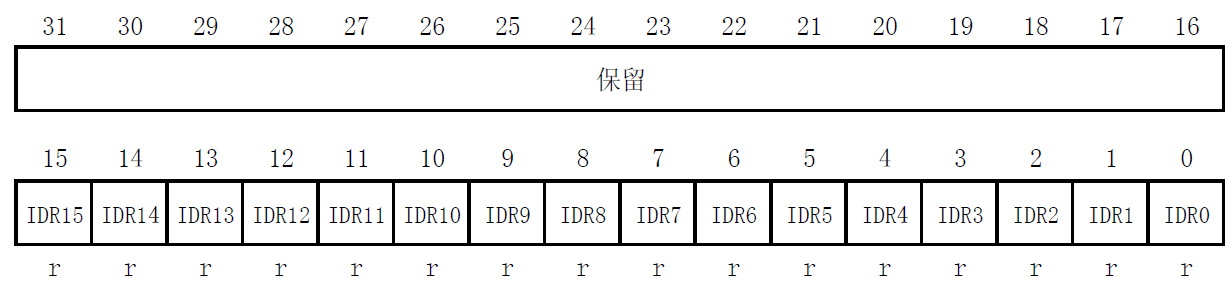
GPIOx_IDR(Input Data Register)用于读取 GPIO 端口引脚的电平状态(高电平 1 或低电平 0)。每个引脚对应寄存器中的一个二进制位,共 16 位(对应 Pin 0 ~ Pin 15),但实际有效位数取决于具体型号的 GPIO 端口引脚数量。
-
只读寄存器:无法通过写入修改其值,仅反映引脚的实时电平。
-
电平有效性:
输入模式下(如浮空、上拉/下拉、模拟输入),值由外部电路或内部上/下拉电阻决定。
输出模式下,值反映当前输出寄存器的状态(ODR 的值),而非外部实际电平。
-
原子操作:直接读取整个寄存器(
GPIOx->IDR)可一次性获取所有引脚的电平状态。
寄存器结构
-
位域:
IDRy(Input Data for Piny),y表示引脚号(0~15)。
位值为 0:引脚当前电平为低(GND)。
位值为 1:引脚当前电平为高(VDD)。
配置模式详解

例
读取 PA3 引脚的电平状态。PA3 必须配置为 输入模式
// 读取 PA3 的电平(假设已配置为输入模式)
uint8_t pinState = (GPIOA->IDR & GPIO_IDR_ID3) >> 3; // 提取 PA3 的值
// 或直接判断特定位
if (GPIOA->IDR & GPIO_IDR_ID3) {
// PA3 为高电平
} else {
// PA3 为低电平
}
// 读取整个端口的电平状态(16位)
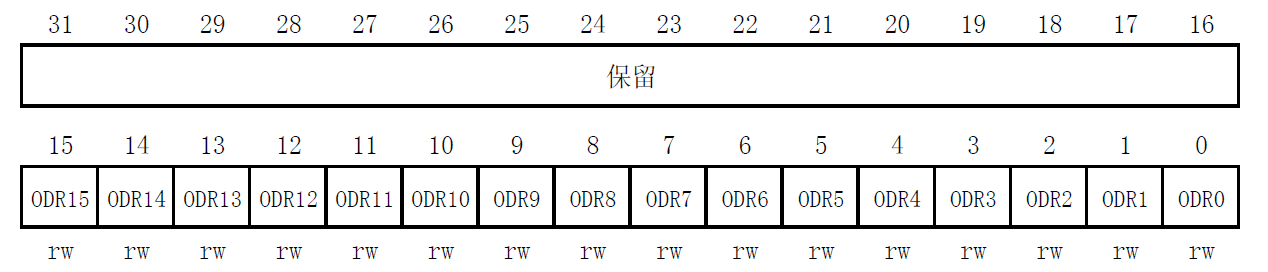
uint16_t portState = GPIOA->IDR;GPIOx_ODR
寄存器作用
GPIOx_ODR(Output Data Register)用于 控制 GPIO 端口引脚的输出电平状态(高电平 1 或低电平 0)。每个引脚对应寄存器中的一个二进制位(共 16 位,控制 Pin 0 ~ Pin 15),直接控制引脚的输出电平,适用于 推挽输出 或 开漏输出模式。
-
读写寄存器:可写入值控制输出电平,也可读取当前设置的电平状态。
-
输出模式依赖:
仅在 输出模式(通用或复用)下有效,输入模式下写入无意义。
在输入模式下读取 ODR 返回的是最后一次写入的值,而非实际引脚电平。
-
原子操作:
直接写入整个寄存器(GPIOx->ODR = value)可一次性设置多个引脚电平。
通过位操作(置位/清零)可单独控制某个引脚。
寄存器结构
-
位域:
ODRy(Output Data for Piny),y表示引脚号(0~15)。
位值为 0:引脚输出低电平(GND)。
位值为 1:
推挽模式:输出高电平(VDD)。
开漏模式:引脚进入高阻态(需外接上拉电阻才能输出高电平)。
配置模式详解

例
控制PB5引脚输出高电平,并保持PB7引脚为低电平,PB5 和 PB7 必须配置为 输出模式
// 方法1:直接操作寄存器(不影响其他位)
GPIOB->ODR |= (1 << 5); // PB5 置高
GPIOB->ODR &= ~(1 << 7); // PB7 置低
// 方法2:使用库函数(如 HAL 库)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET); // PB5 高电平
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET); // PB7 低电平
// 方法3:批量设置多个引脚电平
GPIOB->ODR = (GPIOB->ODR & 0xFF5F) | (1 << 5); // 仅修改 PB5 和 PB7-
输出模式配置:
必须通过 GPIOx_CRL 或 GPIOx_CRH 将引脚设置为 输出模式(通用或复用),否则 ODR 写入无效。
复用功能模式(如 SPI、I2C)下,ODR 通常由外设自动控制,手动写入可能冲突。
-
开漏模式限制:
若配置为 开漏输出,需外接上拉电阻才能输出高电平;否则引脚仅能拉低或保持高阻态。
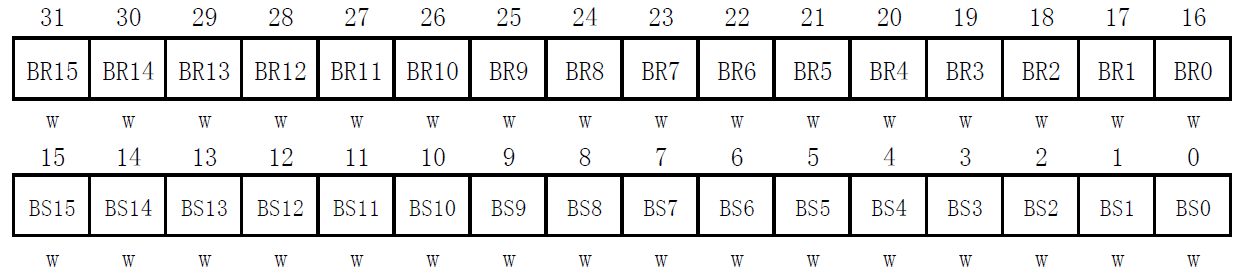
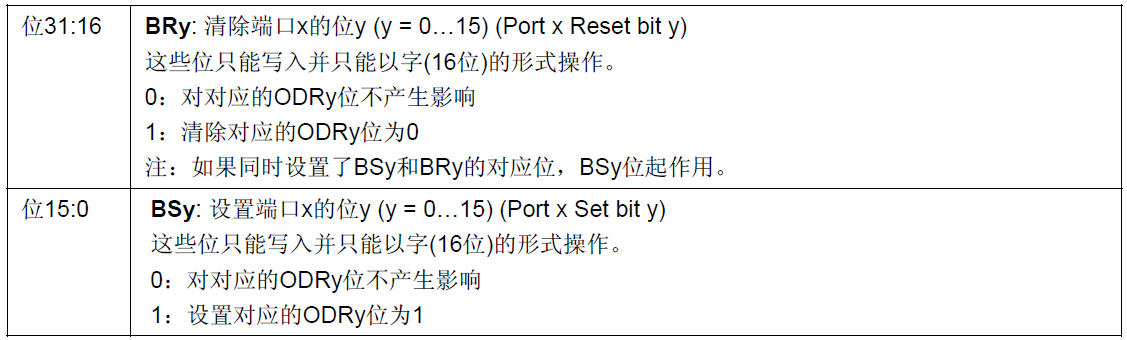
GPIOx_BSRR
寄存器作用
GPIOx_BSRR(Bit Set/Reset Register)是 STM32 中用于 原子操作 GPIO 输出电平的核心寄存器,可直接设置或清除引脚的输出状态,无需读-改-写操作,避免多线程或中断环境下的数据竞争问题
-
高 16 位(BRy):用于清除引脚电平(置低)。
-
低 16 位(BSy):用于设置引脚电平(置高)。
-
单次写入:可同时设置多个引脚的置高/置低操作。
寄存器结构
-
位域:
-
BSy(Bit Set for Pin
y,低 16 位):-
写入
1:对应引脚输出高电平(ODRy = 1)。 -
写入
0:无影响。
-
-
BRy(Bit Reset for Pin
y,高 16 位):-
写入
1:对应引脚输出低电平(ODRy = 0)。 -
写入
0:无影响。
-
-
配置模式详解
例1
将 PA5 置高,PA3 置低
/ 方法:直接操作 BSRR 寄存器
GPIOA->BSRR = (1 << 5) | (1 << (16 + 3));
// 解释:
// - (1 << 5) → 设置 PA5 为高(BS5 = 1)
// - (1 << (16 + 3)) → 清除 PA3 为低(BR3 = 1)例2
快速翻转 PB0 电平(高 → 低 → 高交替)
/ 方法:交替设置 BSRR 的 BR0 和 BS0
GPIOB->BSRR = (1 << 0); // PB0 置高
delay_ms(100);
GPIOB->BSRR = (1 << (16 + 0)); // PB0 置低
delay_ms(100);下一篇继续讲解GPIO寄存器

















 6898
6898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









