




 这篇博客探讨了基本不等式、导数和积分在信息技术中的重要作用。从曲率半径的计算到求导公式,再到特定积分的解法,展示了数学在解决信息技术问题中的核心地位。导数在优化算法、曲线拟合和数据分析中不可或缺,而积分则在处理连续变化和累积效果时发挥关键作用。理解这些数学概念对于深入理解和应用信息技术至关重要。
这篇博客探讨了基本不等式、导数和积分在信息技术中的重要作用。从曲率半径的计算到求导公式,再到特定积分的解法,展示了数学在解决信息技术问题中的核心地位。导数在优化算法、曲线拟合和数据分析中不可或缺,而积分则在处理连续变化和累积效果时发挥关键作用。理解这些数学概念对于深入理解和应用信息技术至关重要。
基本不等式
∣a±b∣≤∣a∣+∣b∣ ∣∣a∣−∣b∣∣≤∣a−b∣ ∣∫abf(x)dx∣≤∫ab∣f(x)∣dx ab≤a+b2≤a2+b22,(a,b>0) abc3≤a+b+c3≤a2+b2+c23,(a,b,c>0) 11+x<ln(1+1x)<1x,(x>0)|a\pm b| \leq |a|+|b| \\ \space \\||a| - |b|| \leq |a - b| \\ \space \\ |\int_a^bf(x)dx| \leq \int_a^b|f(x)|dx \\ \space \\ \sqrt{ab} \leq \frac{a+b}{2} \leq \sqrt{\frac{a^2+b^2}{2}},(a, b>0) \\ \space \\ \sqrt[3]{abc} \leq \frac{a+b+c}{3} \leq \sqrt{\frac{a^2+b^2+c^2}{3}},(a, b,c>0) \\ \space \\ \frac{1}{1+x} <ln(1+\frac{1}{x})<\frac{1}{x}, (x>0) ∣a±b∣≤∣a∣+∣b∣ ∣∣a∣−∣b∣∣≤∣a−b∣ ∣∫abf(x)dx∣≤∫ab∣f(x)∣dx ab≤2a+b≤2a2+b2,(a,b>0) 3abc≤3a+b+c≤3a2+b2+c2,(a,b,c>0) 1+x1<ln(1+x1)<x1,(x>0)
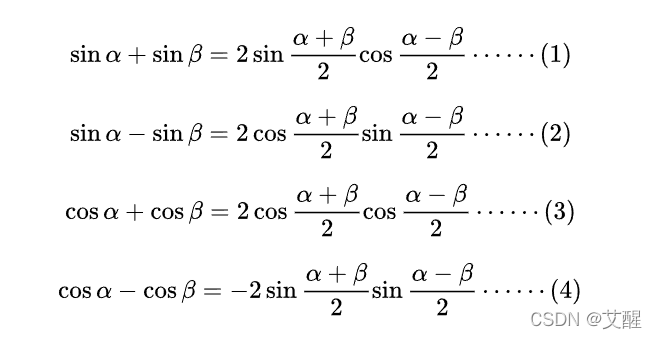
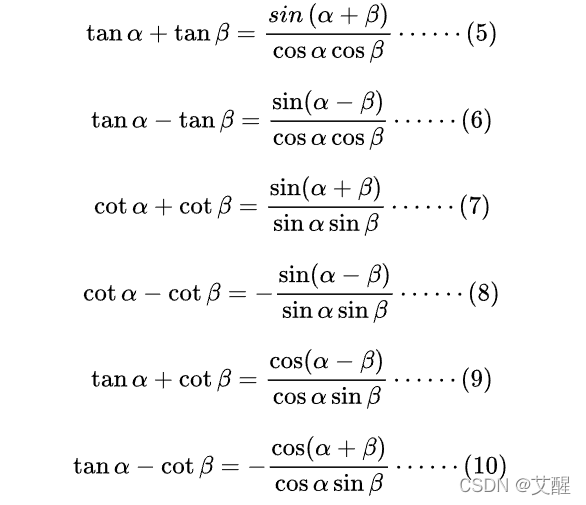
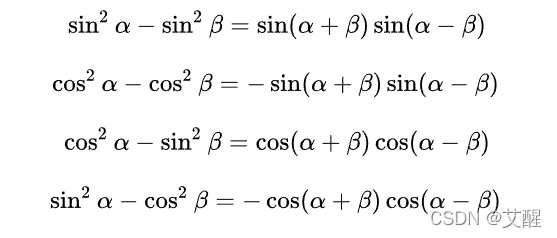
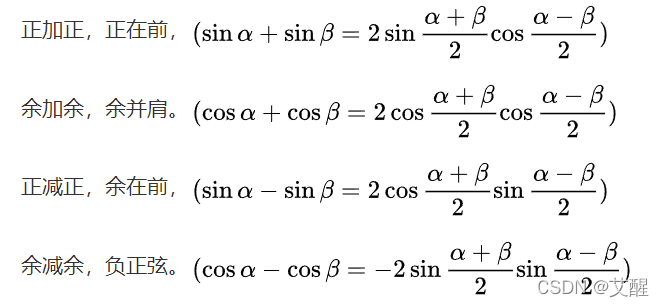
和差化积
曲率半径
R=∣(1+y′)32y′′∣R=|\frac{(1+y')^{\frac{3}{2}}}{y''}|R=∣y′′(1+y′)23∣
求导公式(uv)’=uv’+u’v
(uv)′=limΔx→0u(x+Δx)v(x+Δx)−u(x)v(x)Δx=limΔx→0u(x+Δx)v(x+Δx)−u(x)v(x)−u(x+Δx)v(x)+u(x+Δx)v(x)Δx=limΔx→0u(x+Δx)[v(x+Δx)−v(x)]+v(x)[u(x+Δx)−u(x)]Δx=uv′+u′v(uv)'=\lim_{\Delta x \to 0}\frac{u(x+\Delta x)v(x+\Delta x)-u(x)v(x)}{\Delta x} \\=\lim_{\Delta x \to 0} \frac{u(x+\Delta x)v(x+\Delta x)-u(x)v(x) - u(x + \Delta x)v(x)+ u(x + \Delta x)v(x)}{\Delta x} \\=\lim_{\Delta x \to 0} \frac{u(x+\Delta x)[v(x+\Delta x)-v(x)]+v(x)[u(x+\Delta x)-u(x)]}{\Delta x} \\=uv'+u'v (uv)′=Δx→0limΔxu(x+Δx)v(x+Δx)−u(x)v(x)=Δx→0limΔxu(x+Δx)v(x+Δx)−u(x)v(x)−u(x+Δx)v(x)+u(x+Δx)v(x)=Δx→0limΔxu(x+Δx)[v(x+Δx)−v(x)]+v(x)[u(x+Δx)−u(x)]=uv′+u′v
导数公式
∫1cosxdx=ln(∣secx+tanx∣)+C∫1sinxdx=ln(∣cscx−cotx∣)+C∫secxtanxdx=secx+C∫cscxcotxdx=−cscx+C∫cot2xdx=−cscx−x+C∫1x2−a2=12aln∣x−ax+a∣+C∫1a2−x2=12aln∣x+ax−a∣+C∫csc2xdx=−cotx+C
\begin{aligned}
&\int \frac{1}{cosx}dx =ln(|secx+tanx|)+C \\
&\int \frac{1}{sinx}dx =ln(|cscx - cotx|)+C \\
&\int secxtanxdx = secx+C
\\ &\int cscxcotxdx =-cscx+C
\\ &\int cot^2xdx =-cscx-x+C
\\ &\int \frac{1}{x^2-a^2} =\frac{1}{2a}ln|\frac{x-a}{x+a}|+C
\\ &\int \frac{1}{a^2-x^2} =\frac{1}{2a}ln|\frac{x+a}{x-a}|+C
\\ &\int csc^2xdx =-cotx+C
\end{aligned}
∫cosx1dx=ln(∣secx+tanx∣)+C∫sinx1dx=ln(∣cscx−cotx∣)+C∫secxtanxdx=secx+C∫cscxcotxdx=−cscx+C∫cot2xdx=−cscx−x+C∫x2−a21=2a1ln∣x+ax−a∣+C∫a2−x21=2a1ln∣x−ax+a∣+C∫csc2xdx=−cotx+C


















 952
952

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











