



 本文详细介绍了STM32的GPIO输入模式,包括浮空、上拉、下拉和模拟输入,并解析了四种输出模式:开漏、开漏复用、推挽和推挽复用。通过STM32CubeMX配置GPIO的基本步骤和相关函数使用,为读者提供了清晰的GPIO操作指南。
本文详细介绍了STM32的GPIO输入模式,包括浮空、上拉、下拉和模拟输入,并解析了四种输出模式:开漏、开漏复用、推挽和推挽复用。通过STM32CubeMX配置GPIO的基本步骤和相关函数使用,为读者提供了清晰的GPIO操作指南。
文章目录
一、GPIO输入模式
GPIO分为四种输入模式
-输入浮空(GPIO_Mode_IN_FLOATING)
-输入上拉(GPIO_Mode_IPU)
-输入下拉(GPIO_Mode_IPD)
-模拟输入(GPIO_Mode_AIN)
1.1 输入浮空(GPIO_Mode_IN_FLOATING)
输入浮空:浮空就是逻辑器件与引脚即不接高电平,也不接低电平。由于逻辑器件的内部结构,当它输入引脚悬空时,相当于该引脚接了高电平。
1.2 输入上拉(GPIO_Mode_IPU)
输入上拉模式:上拉就是把点位拉高,比如拉到Vcc。
上拉就是将不确定的信号通过一个电阻嵌位在高电平。
电阻同时起到限流的作用。
1.3 输入下拉(GPIO_Mode_IPD)
输入下拉:就是把电压拉低,拉到GND。与上拉原理相似
1.4 模拟输入(GPIO_Mode_AIN)
模拟输入:模拟输入是指传统方式的输入,数字输入是输入PCM数字信号,即0,1的二进制数字信号,通过数模转换,转换成模拟信号,经前级放大进入功率放大器,功率放大器还是模拟的
二、GPIO输出模式输出模式
GPIO分为四种输出模式
-开漏输出(GPIO_Mode_Out_OD)
-开漏复用功能(GPIO_Mode_AF_OD)
-推挽式输出(GPIO_Mode_Out_PP)
-推挽式复用功能(GPIO_Mode_AF_PP)
2.1 开漏输出(GPIO_Mode_Out_OD)
开漏输出:输出端相当于三极管的集电极,要得到高电平状态需要上拉电阻才行,适合于做电流型的驱动,其吸收电流的能力相对强(一般20mA以内)
2.2 开漏复用功能(GPIO_Mode_AF_OD)
开漏复用功能:可以理解为GPIO口被用作第二功能时的配置情况(即并非作为通用IO口使用)。端口必须配置成复用功能输出模式(推挽或开漏)
2.3 推挽式输出(GPIO_Mode_Out_PP)
推挽式输出:可以输出高,低电平,连接数字器件;推挽结构一般是指两个三级管分别受到互补信号的控制,总是在一个三极管导通的时候另一个截止。高低电平由IC的电源低定。
推挽电路是两个参数相同的三极管或MOSFET,以推挽方式存在于电路中,各负责正负半周的波形方法任务,电路工作时,两只对称的功率开关管每次只有一个导通,所以导通损耗小,效率高。输出即可以向负载灌电流。推拉式输出级即提高电路的负载能力,又提高开关速度.
2.4 推挽式复用功能(GPIO_Mode_AF_PP)
推挽式复用功能:可以理解为GPIO口被用作第二功能时的配置情况
三、stm32cubemx配置
3.1 基本配置
首先是在STM32cubemx中点击所选引脚配置
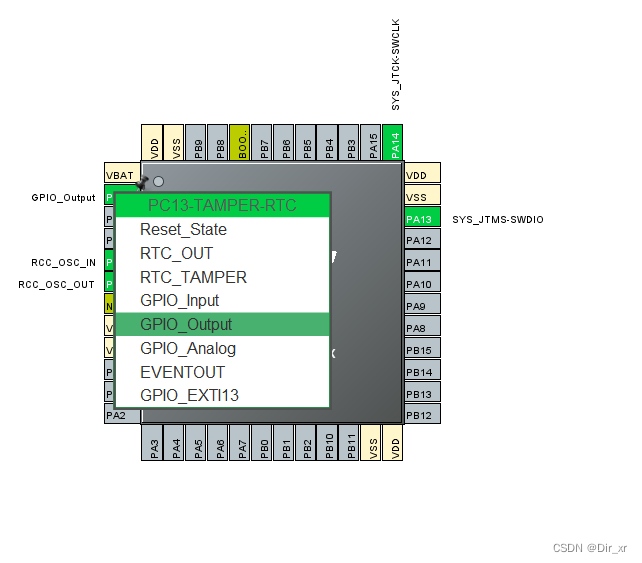
然后点击GPIO页面进行详细参数的配置
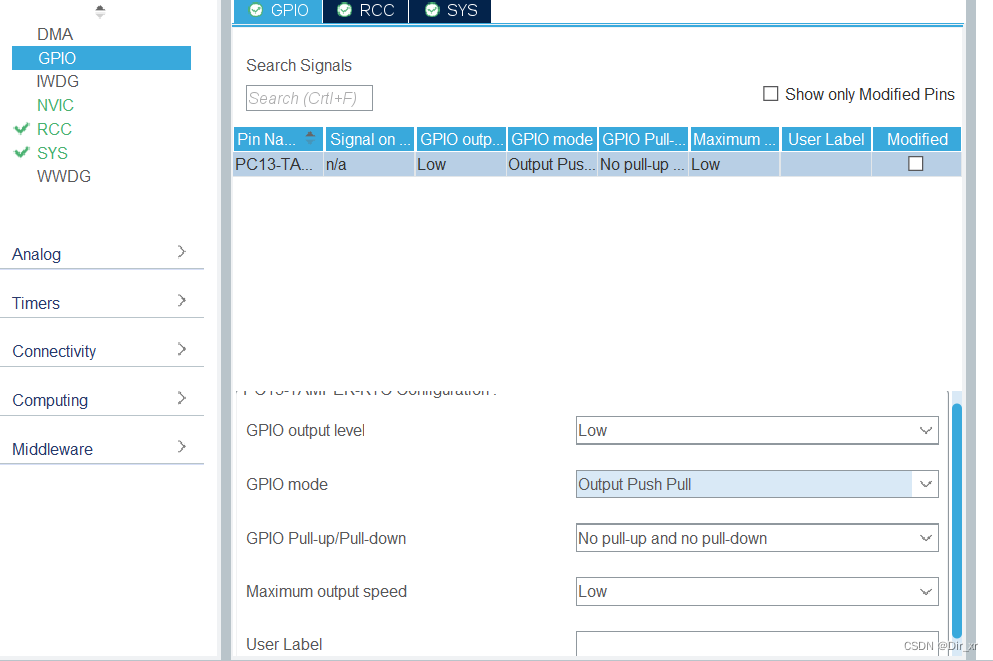
然后再配置界面配置参数
GPIO output level 引脚电平设置 高/低
GPIO mode GPIO模式 推挽输出/开漏输出
GPIO Pull-up/Pull-dowm 上拉下拉电阻 上拉电阻/下拉电阻/无上拉或下拉
Maxinum output speed 引脚速度设置 低速/中速/高速
User Label 用户标签 给引脚设置名称 如SY1
3.2 关于GPIO的函数
在HAL库 GPIO函数库
首先打开stm32f4xx_hal_gpio.h 发现一共定义有8个函数
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init);
void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin);
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin);
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init);
功能: GPIO初始化
实例:HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin);
功能:在函数初始化之后的引脚恢复成默认的状态,即各个寄存器复位时的值
实例:HAL_GPIO_Init(GPIOC, GPIO_PIN_4);
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
功能:读取引脚的电平状态、函数返回值为0或1
实例:HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_4);
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
功能:引脚写0或1
实例:HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4,0);
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
翻转引脚的电平状态
实例:HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_4); 常用在LED上
HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
功能:锁住引脚电平,比如说一个管脚的当前状态是1,当这个管脚电平变化时保持锁定时的值。
实例:HAL_GPIO_LockPin(GPIOC, GPIO_PIN_4);
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin);
功能: 外部中断服务函数,清除中断标志位
实例:HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_4);
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
功能: 中断回调函数,可以理解为中断函数具体要响应的动作。
实例:HAL_GPIO_EXTI_Callback(GPIO_PIN_4);
总结
GPIO 输入 输出
以及STM32cube的使用

















 718
718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









