



- 介绍
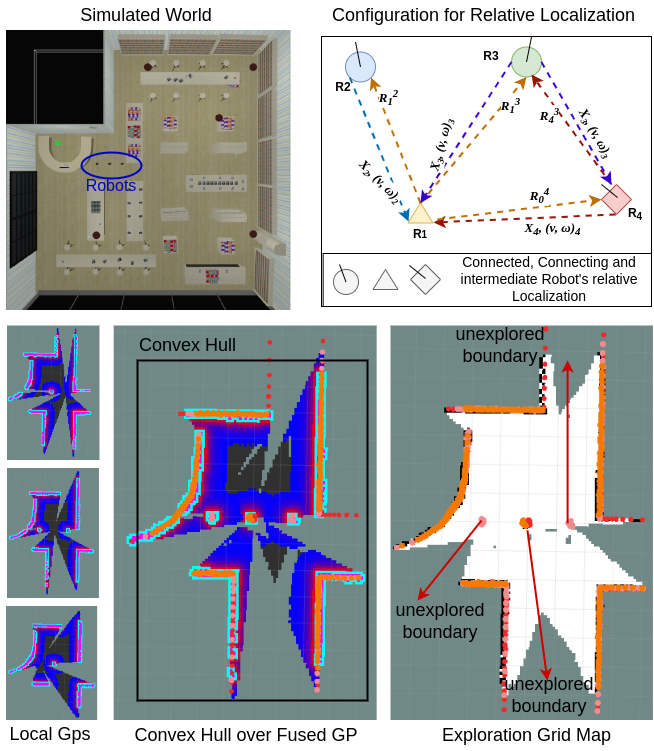
通过使用GP创建地图,机器人首先使用RSSI作为本地传感器数据执行相对位置加权连接图,根据特定位置的潜在位置扩展这些图形,然后进一步优化以获取所有连接机器人的相对位置估计; SEAL寻求有效地实现高本地化精度。此外,机器人还提供融合的高斯工艺图,然后将其转换为全球地图。SEAL应用凸起的船体优化进行边界检测,并将机器人导航到未开发的边界
 系统概述
系统概述
 2. 下载安装
2. 下载安装
C++ requirements.
(pybind11 is also required, but it's built into this repository; you don't need to install)
python 3.6+
Turtlebot Simulation Installation is required to launch turtlebot 3e for Gazebo simulation
g2o installed
2.1 g2o Installation
git clone https://github.com/uoip/g2opy.git
cd g2opy
mkdir build
cd build
cmake ..
make -j8
cd ..
python setup.py install
make -j8 编译报错:
Building CXX object python/CMakeFiles/g2o.dir/g2o.cpp.o
........
make[2]: *** [python/CMakeFiles/g2o.dir/build.make:63:python/CMakeFiles/g2o.dir/g2o.cpp.o] error 1
make[1]: *** [CMakeFiles/Makefile2:1345:python/CMakeFiles/g2o.dir/all] error 2
make: *** [Makefile:130:all] error 2
解决方法:
cmake .. -DPYBIND11_PYTHON_VERSION=3.8
打开 g2opy/python/core/eigen_types.h 修改以下几行:
.def("x", (double (Eigen::Quaterniond::*) () const) &Eigen::Quaterniond::x)
.def("y", (double (Eigen::Quaterniond::*) () const) &Eigen::Quaterniond::y)
.def("z", (double (Eigen::Quaterniond::*) () const) &Eigen::Quaterniond::z)
.def("w", (double (Eigen::Quaterniond::*) () const) &Eigen::Quaterniond::w)
为
.def("x", [](const Eigen::Quaterniond& q) { return q.x(); })
.def("y", [](const Eigen::Quaterniond& q) { return q.y(); })
.def("z", [](const Eigen::Quaterniond& q) { return q.z(); })
.def("w", [](const Eigen::Quaterniond& q) { return q.w(); })
make -j8 重新编译,如果出现错误,则把build删除重新构建
2.2 相关依赖
pip3 install opencv-python numpy scikit-learn
sudo apt-get install python3-tk
pip3 install g2o-python
2.3 add in the amazon world map by executing the following comments:
mkdir -p ~/catkin_explore/src
cd ~/catkin_explore/src
git clone https://github.com/aws-robotics/aws-robomaker-small-house-world.git
git clone https://github.com/aws-robotics/aws-robomaker-bookstore-world.git
cd ~/catkin_explore/
catkin_make
2.4 下载代码库到src/
cd catkin_explore/src
git clone https://github.com/herolab-uga/ROS-SEAL.git
cd ~/catkin_explore/
catkin_make
2.5 launch
roslaunch seal seal_bookstore.launch

















 2934
2934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









