




摘要:本研究针对室内扫地机器人全覆盖清扫问题,基于网格地图和 MATLAB 搭建了路径规划仿真系统。首先对环境进行离散化建模,并采用随机分块与逻辑与运算生成带障碍的地图;然后将可行单元转换为图结构,利用深度优先搜索(DFS)实现规划式全覆盖路径。为对比效果,设计了随机碰撞式清扫策略,模拟传统无规划扫地机器人仅依靠随机运动与简单避障完成覆盖的过程。仿真结果表明,在 20×15 的随机障碍环境下,DFS 仅用约 408 步即可完成全覆盖,而随机碰撞策略约需 9148 步,规划式方法在路径长度与清扫效率方面具有显著优势。本文工作为扫地机器人路径规划算法的研究与改进提供了直观的对比平台与参考依据。
作者:Bob(自研改进)
环境配置
开发工具:Matlab R2020b、R2025b
操作系统:Windows 11
硬件配置
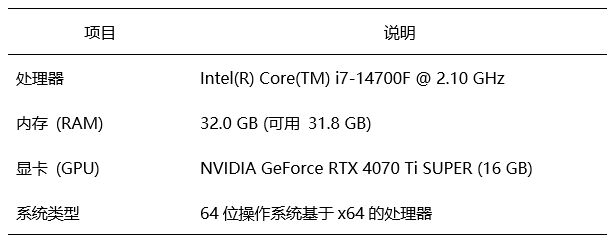
表1 惠普(HP)暗影精灵10台式整机配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
项目概述
本研究围绕扫地机器人在室内环境中的全覆盖清扫问题展开研究,设计并实现了一个基于 MATLAB 的路径规划与仿真系统。针对室内环境中存在障碍物分布随机、空间结构复杂等特点,本文首先采用网格化建模方法对环境进行离散化表示,并通过分块随机生成与逻辑与运算相结合的方法构建可变障碍地图,以提高实验场景的多样性与真实性。在此基础上,构建了可行空间的邻接关系图,并采用深度优先搜索(Depth-First Search, DFS)算法实现规划式全覆盖路径搜索。该算法能够在保证遍历所有可达区域的前提下给出一条具有确定性的覆盖路径。
为对比规划式方法的优劣,进一步实现了随机碰撞式清扫策略,通过模拟传统扫地机器人依靠随机运动及简单避障行为完成全覆盖的过程,记录其行走轨迹及步数。在 MATLAB 环境中分别对两种策略进行了可视化展示,并对其清扫效率进行量化分析。实验结果表明,在具有随机障碍的 20×15 网格环境中,DFS 方法以较少的路径长度完成了全覆盖(408 步),而随机碰撞式策略的步数显著更高(9148 步),性能差距达 22 倍以上。
综上所述,规划式 DFS 全覆盖算法在路径可控性与执行效率方面具有明显优势,可为实际扫地机器人路径规划算法的研究与改进提供参考。本文搭建的仿真平台也为后续加入启发式搜索、混合策略以及智能规划算法奠定了基础。
系统设计
本系统基于深度优先搜索(DFS)构建扫地机器人全覆盖路径规划模型,并对比无规划随机碰撞策略的清扫效果。系统通过网格化环境建模和邻接图构建,使机器人能够按照 DFS 逻辑在障碍物环境中实现系统性的遍历,并通过回溯机制跳出死区,从而确保所有可达区域被完全覆盖。同时,为验证规划式路径的效率,系统实现随机碰撞式清扫策略,并对两种方法的路径轨迹和总步数进行对比,为清扫算法的优化提供实验基础。
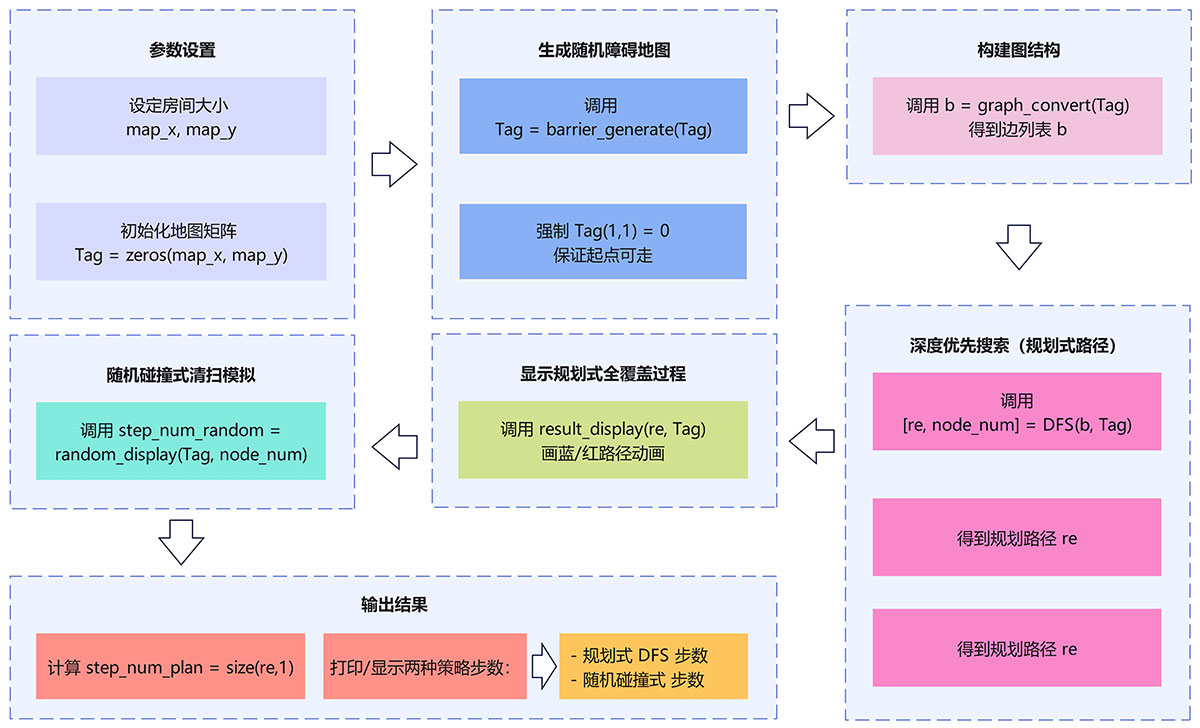
图1 系统整体流程图
运行展示
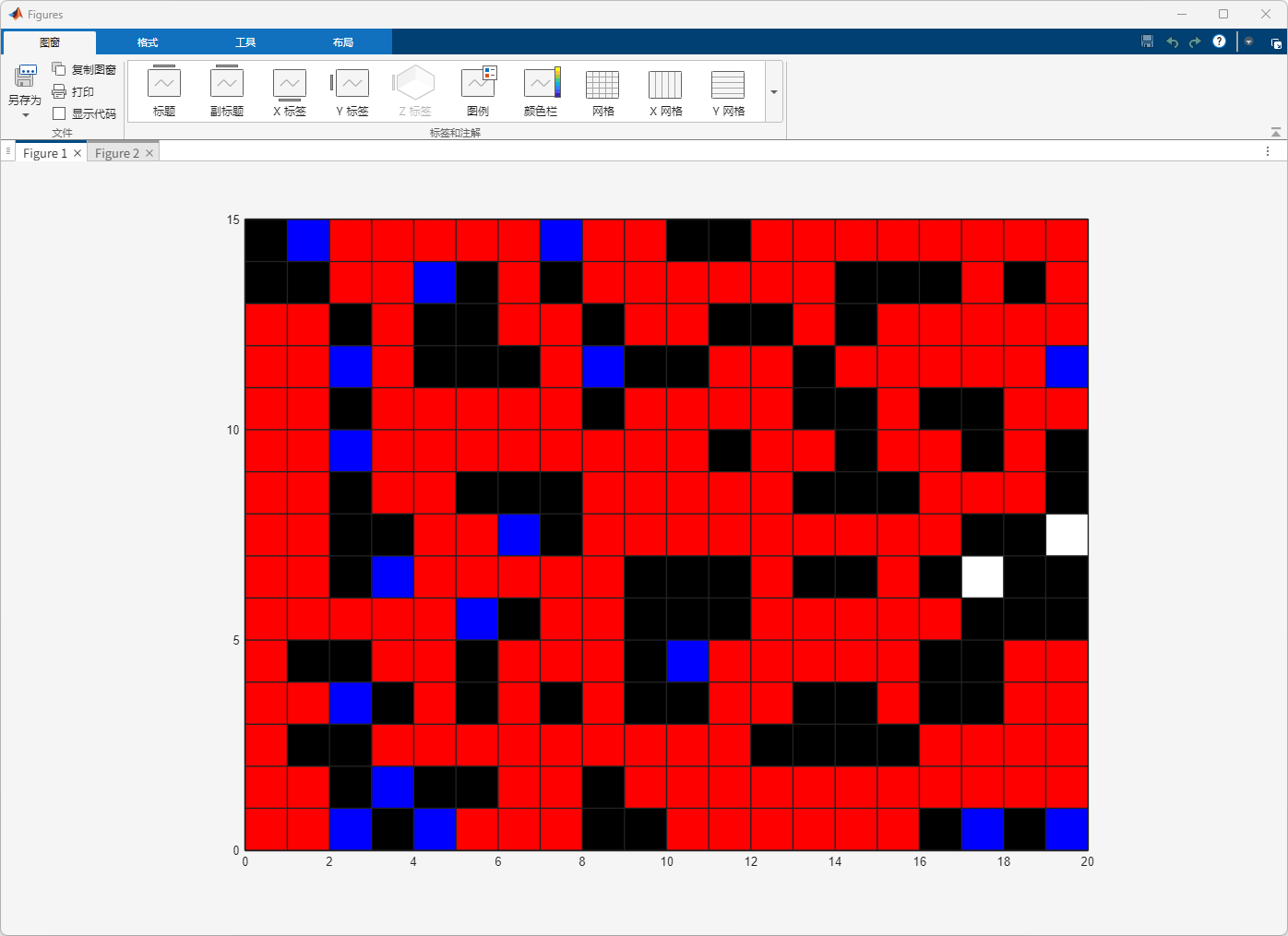
图2 规划式 DFS 清扫路径结果
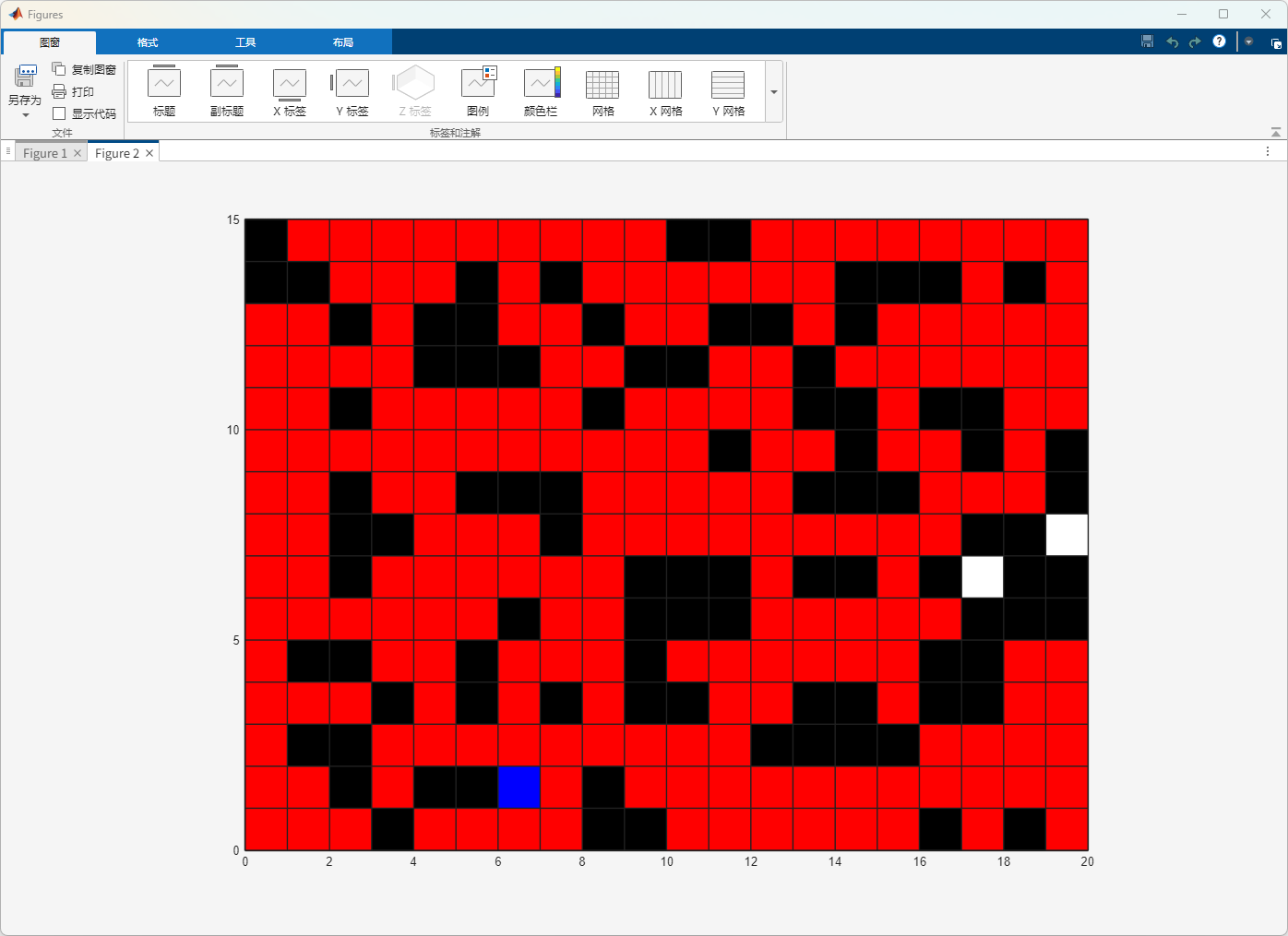
图3 随机碰撞式清扫结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









