




摘要:本文提出了一种基于内螺旋算法的扫地机器人全覆盖路径规划方法。该算法通过模拟机器人沿逆时针螺旋路径逐步清扫房间,确保覆盖所有可清扫区域并避开障碍物。遇到死区时,机器人通过扩展搜索重新规划路径。实验结果表明,该方法能够高效完成全覆盖清扫,并适应不同房间布局和障碍物配置,具有较强的容错能力。
作者:Bob(自研改进)
环境配置
开发工具:Matlab R2020b、R2025b
操作系统:Windows 11
硬件配置
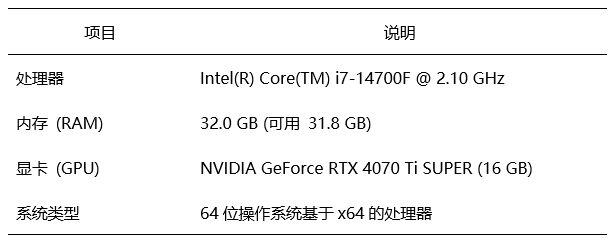
表1 惠普(HP)暗影精灵10台式整机配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
项目概述
随着智能家居技术的不断发展,扫地机器人已成为家居自动化的关键组成部分。为了提高扫地机器人的清扫效率和全面性,路径规划算法在扫地机器人的设计中扮演着至关重要的角色。本文提出了一种基于内螺旋算法的全覆盖路径规划方法,旨在优化扫地机器人的清扫路径,使其能够高效地遍历房间内的每一个可清扫区域。该算法通过模拟机器人在房间内沿逆时针螺旋路径逐步扩展的运动方式,确保覆盖整个房间,克服了障碍物和房间边界的限制,避免了死区的产生。
我们首先构建了一个房间地图模型,并将障碍物及清扫区域进行标注。然后,通过内螺旋算法控制机器人根据周围环境逐步选择移动方向(右、上、左、下),确保每个空格都被清扫。在遇到死区或清扫完毕的情况下,机器人通过扩展搜索机制重新规划路径,避免被困在死区内。实验结果表明,基于内螺旋算法的路径规划方法不仅能够实现高效的全覆盖清扫,还具有较强的适应性和容错能力,能够在不同的房间布局和障碍物配置下完成清扫任务。
本研究为扫地机器人在实际应用中的全覆盖路径规划提供了一种有效的解决方案,且该算法可广泛应用于多种复杂环境中,具有重要的工程价值和推广前景。
系统设计
本系统旨在实现基于内螺旋算法的扫地机器人全覆盖路径规划,通过模拟机器人在房间内沿螺旋路径逐步清扫,最终实现房间内所有可清扫区域的覆盖。该算法在有障碍物的情况下能够自动避让,并在遇到死区时采用扩展搜索策略,保证机器人可以有效跳出死区,继续执行清扫任务。最终,输出完整的清扫路径,以便进行后续的路径分析和优化。
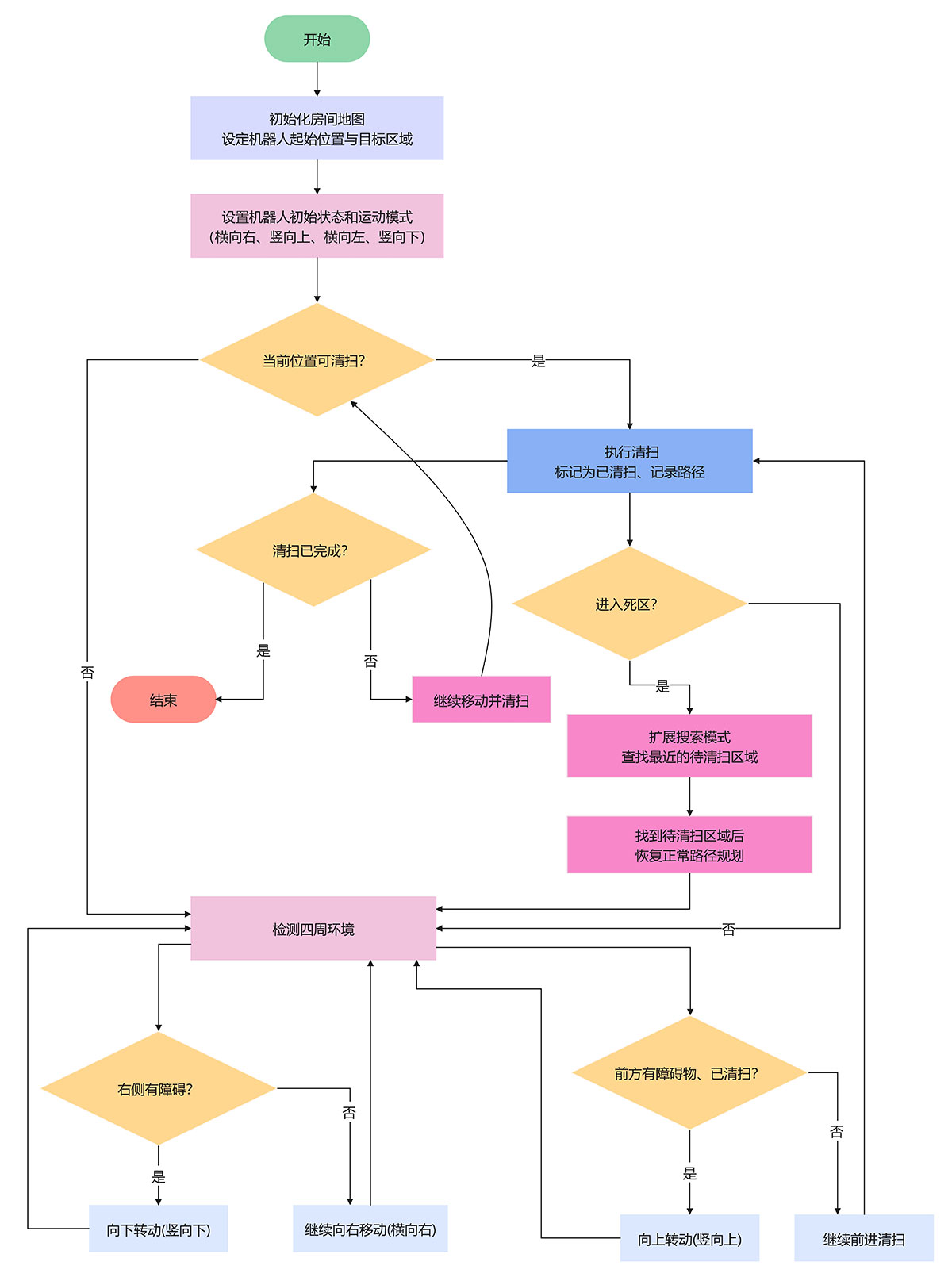
图1 系统整体流程图
运行展示
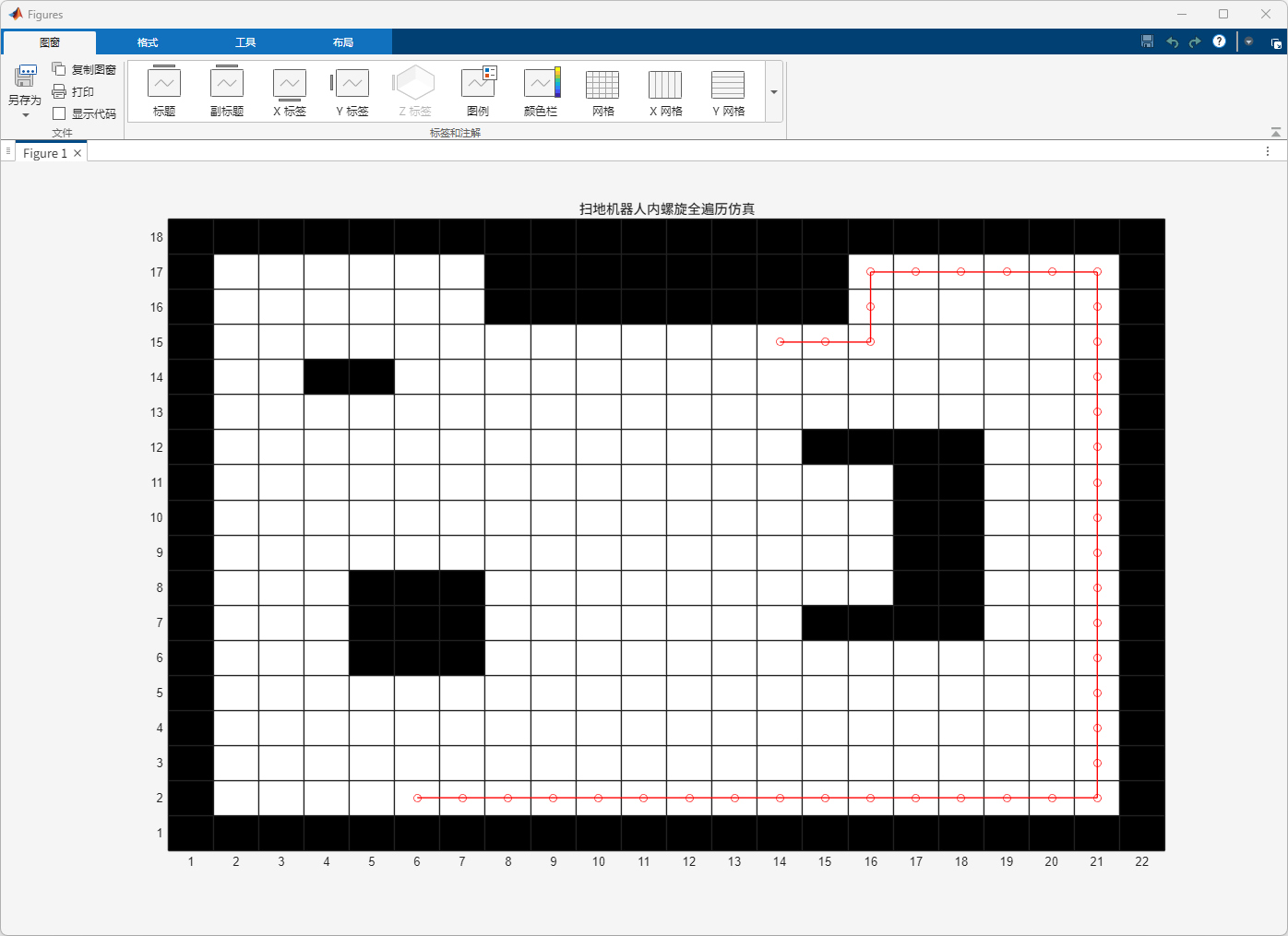
图2 扫地机器人路径规划-初步清扫
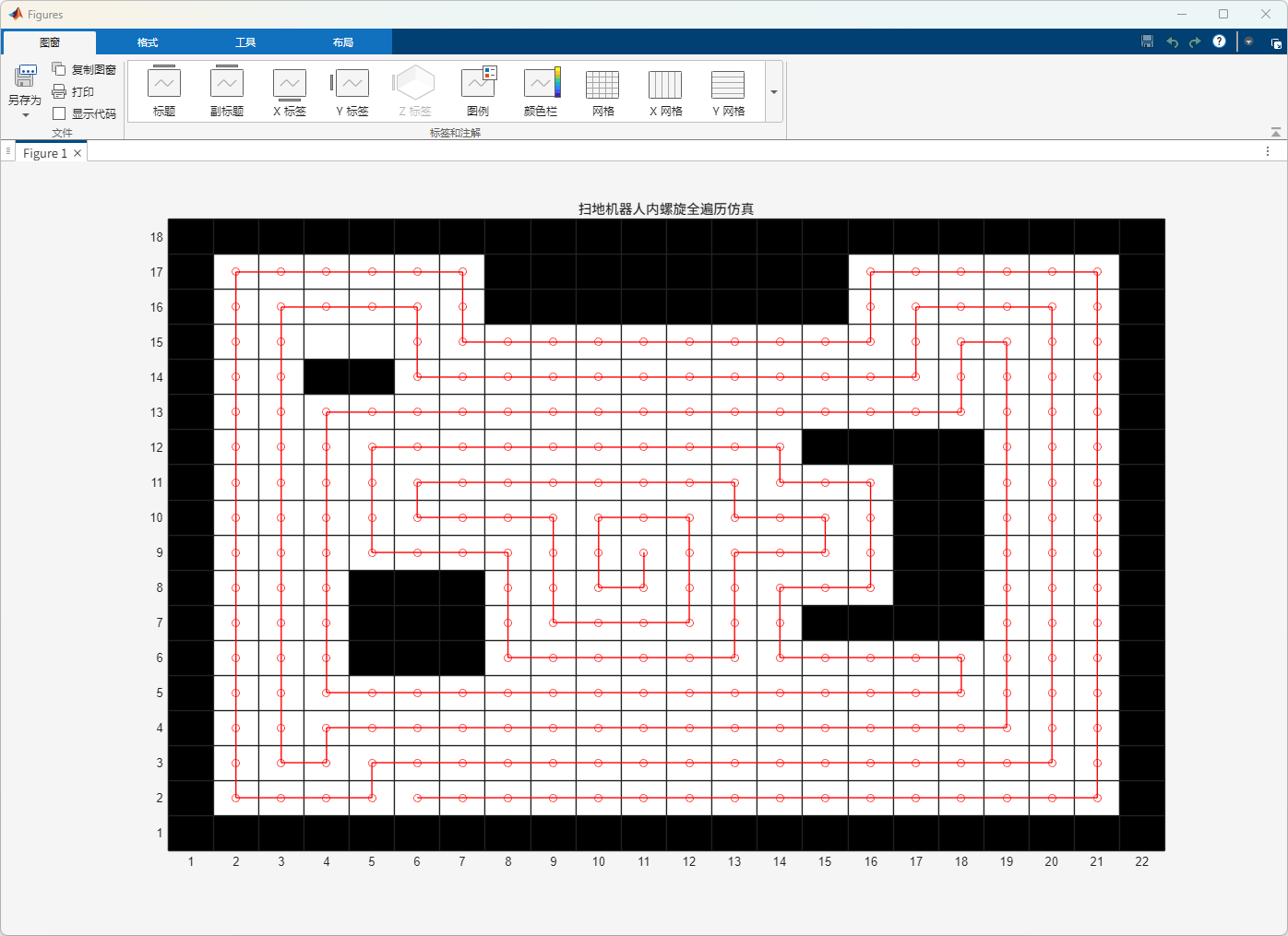
图3 扫地机器人路径规划-全覆盖清扫

















 1604
1604

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









