




 本文探讨了n点透视的基本概念及应用,详细解析了从像素到相机坐标转换的过程,并通过P3P方法实现相机位姿的精确估计。
本文探讨了n点透视的基本概念及应用,详细解析了从像素到相机坐标转换的过程,并通过P3P方法实现相机位姿的精确估计。
n点透视问题学习笔记:
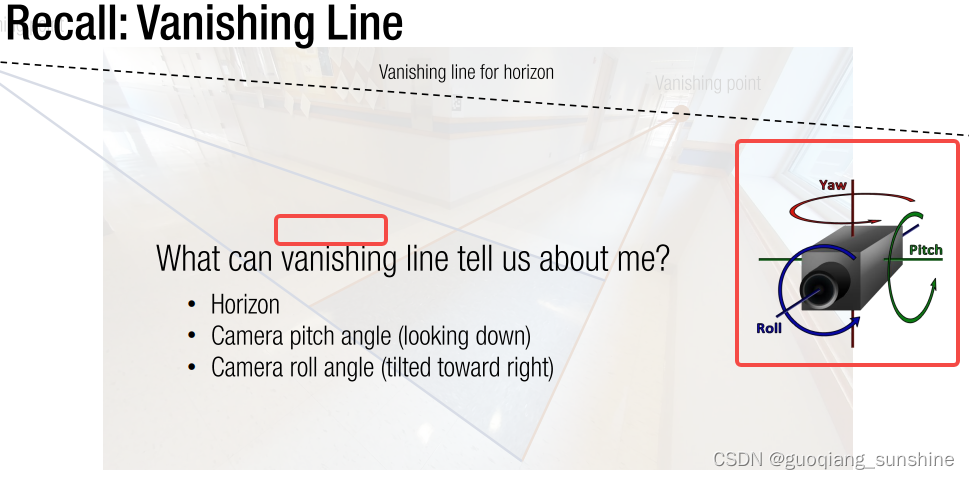
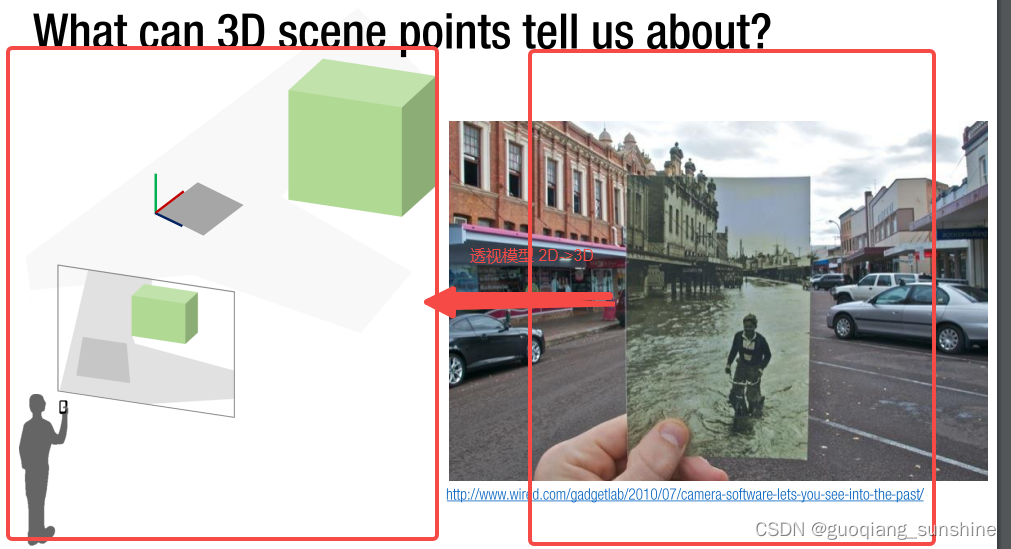
空间关系的表示:
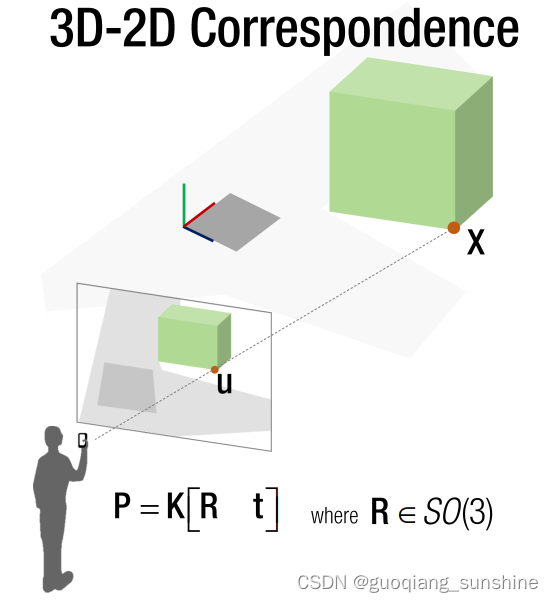
透视相机模型的推到及其表示:
从像素到相机坐标的转换关系表示:
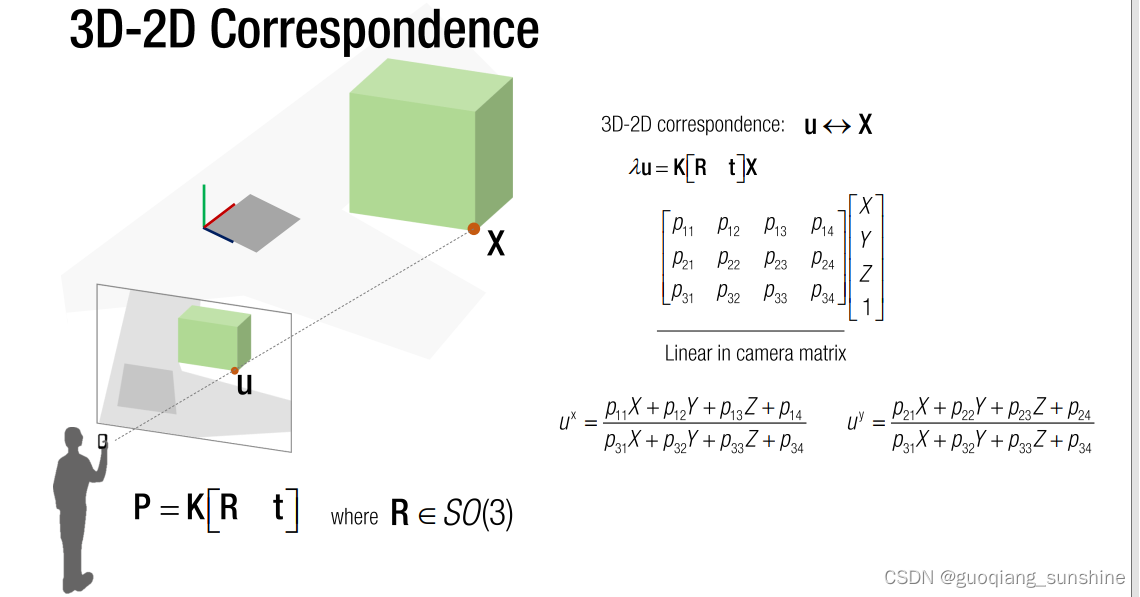
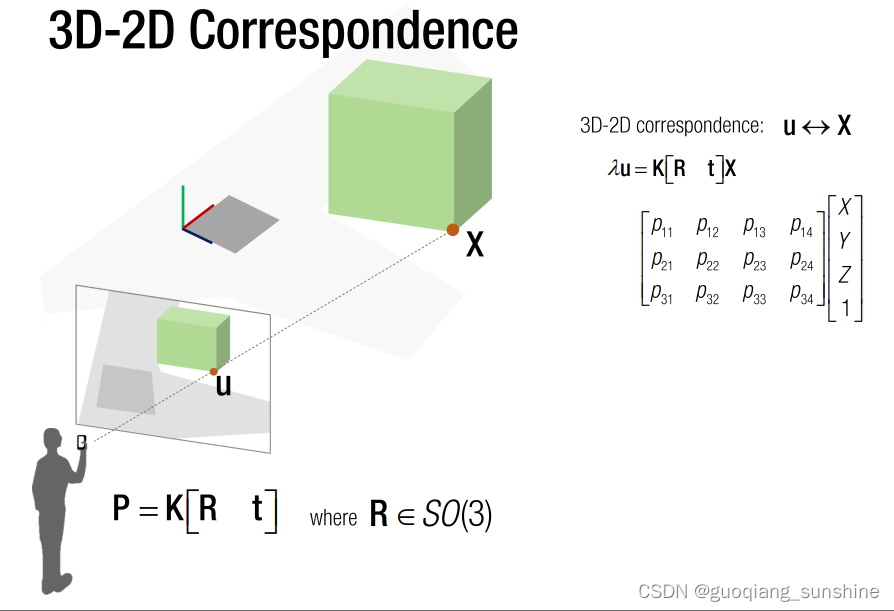
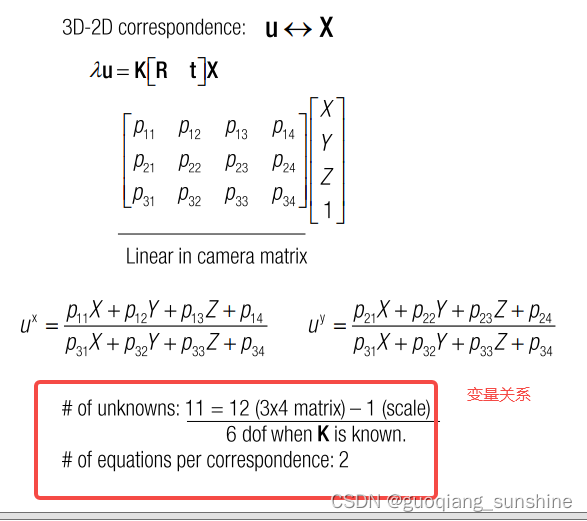
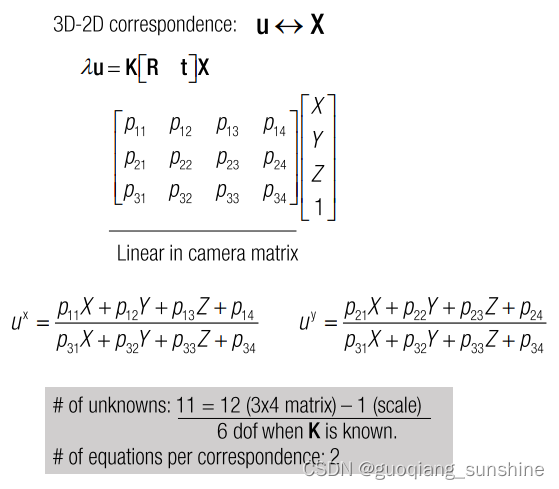
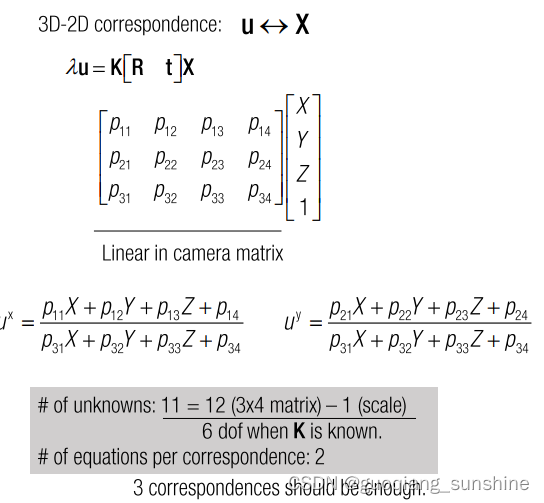
对应关系明确:
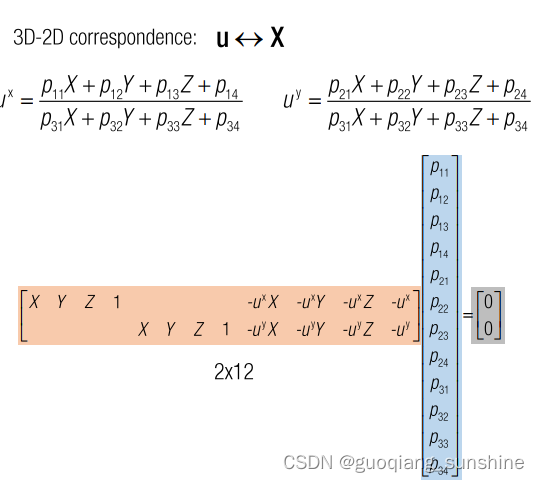
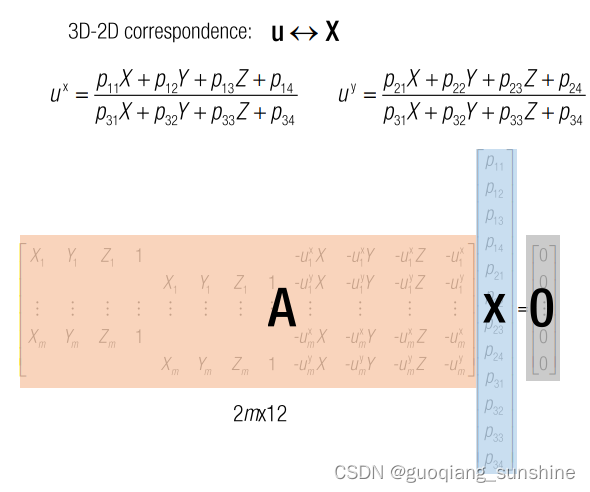
矩阵化表示:
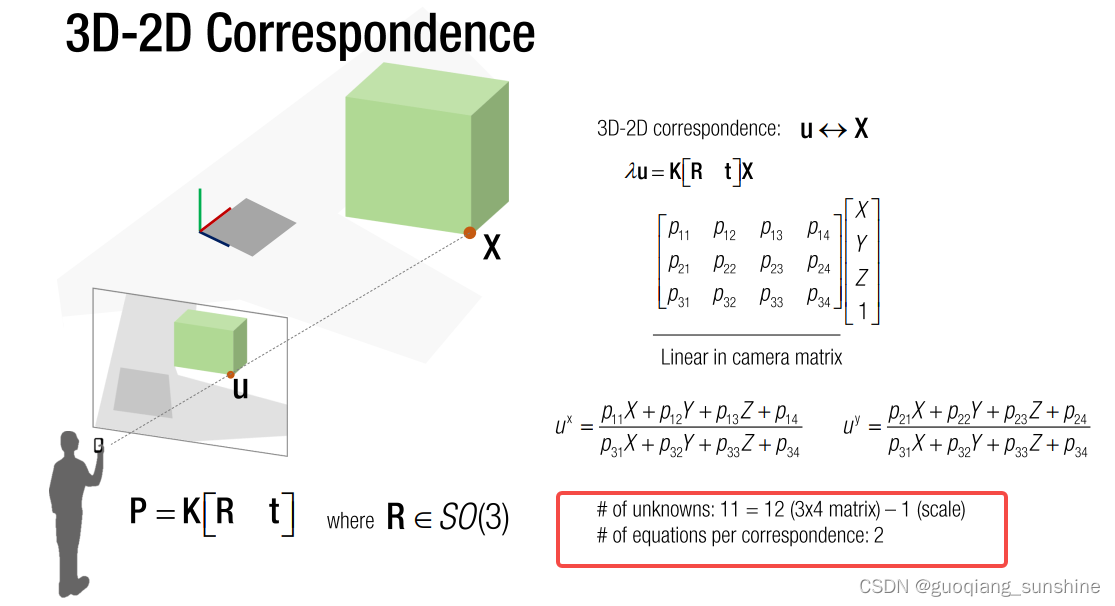
从相机模型到相机位姿估计:
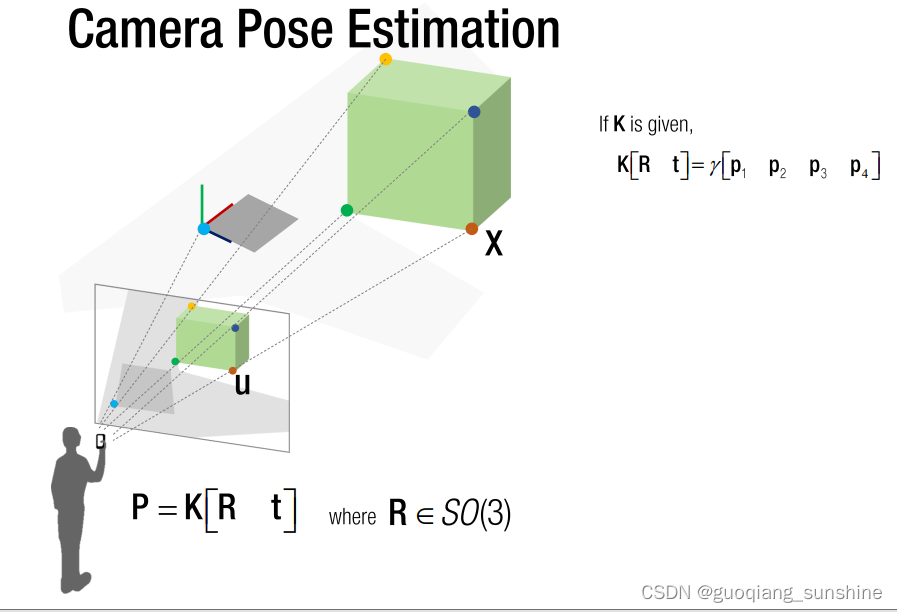
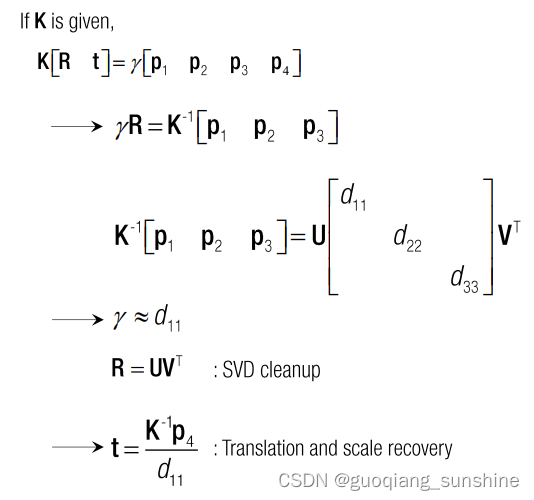
内参K已知的话:
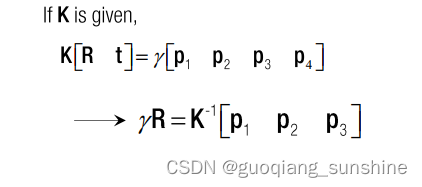
相机位姿估计变成下面:
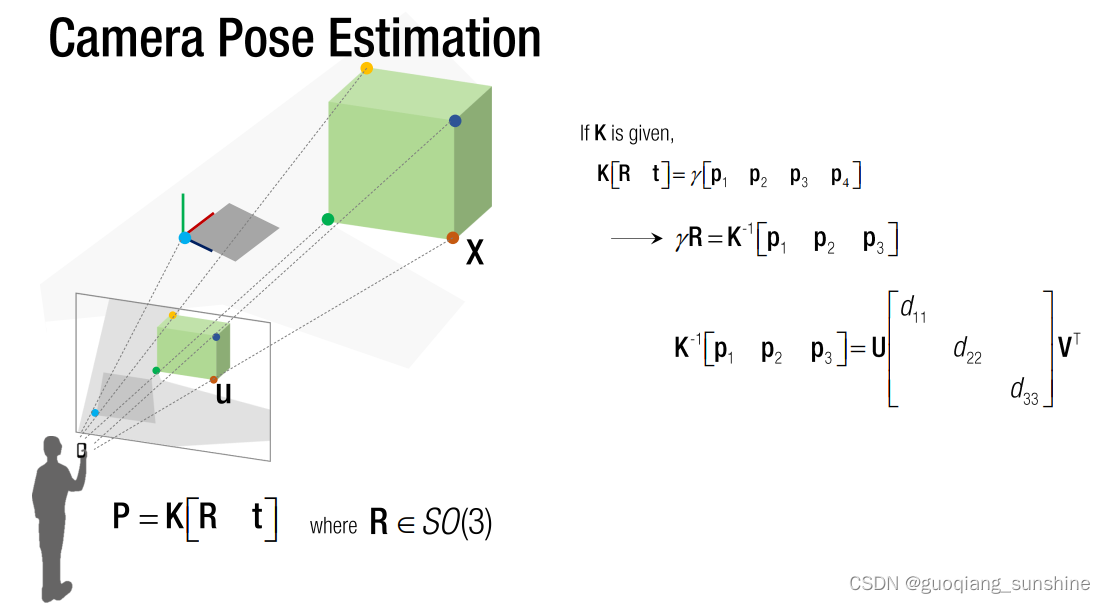
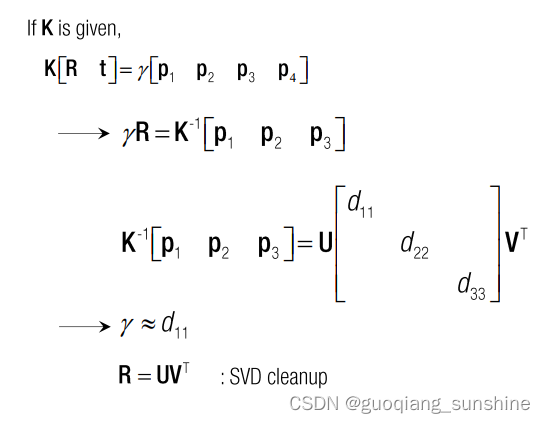
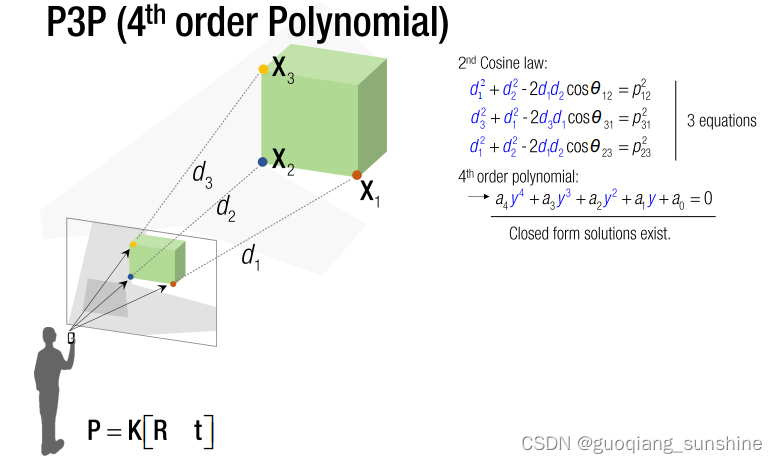
估计求解:
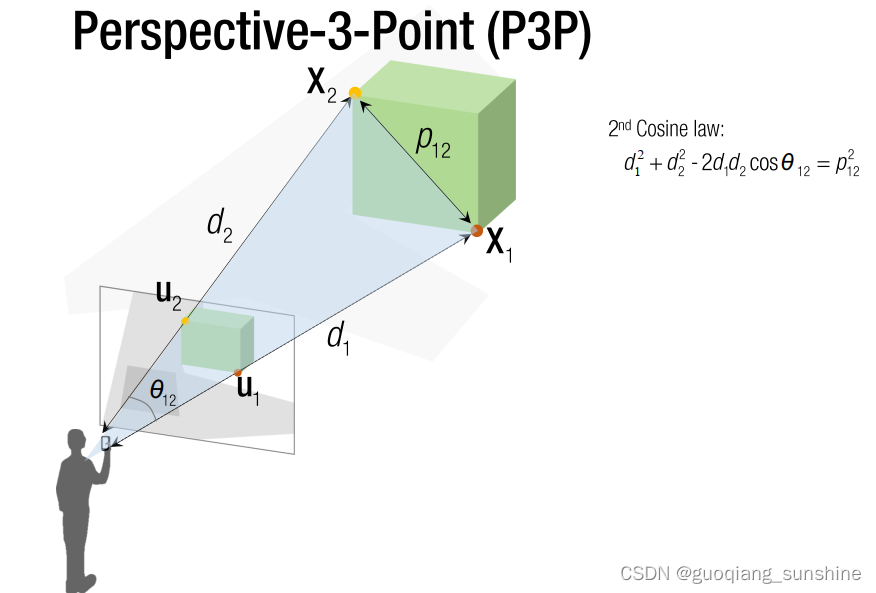
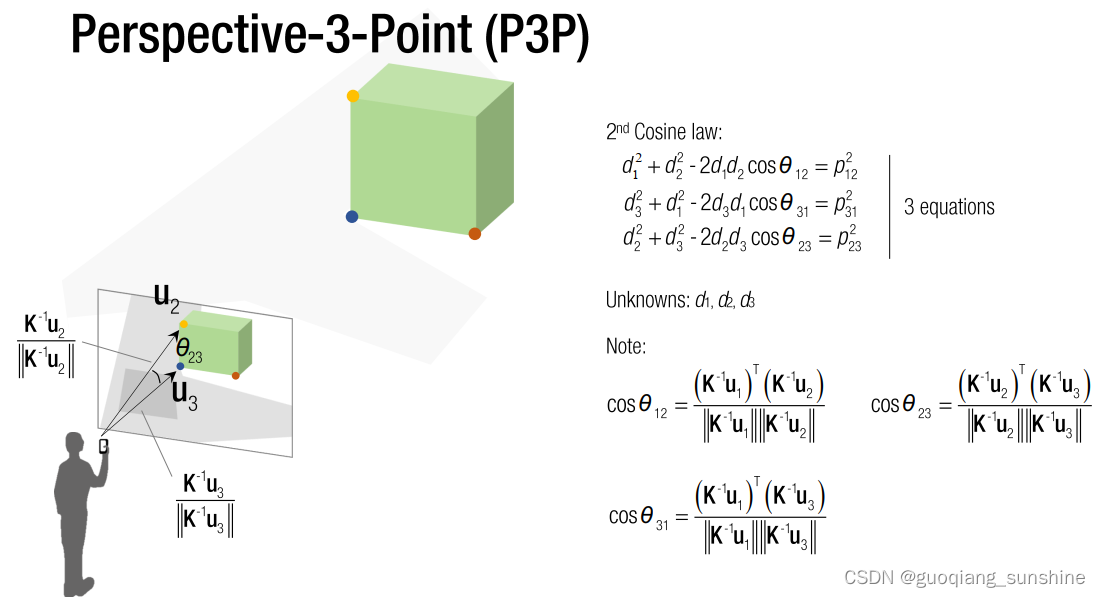
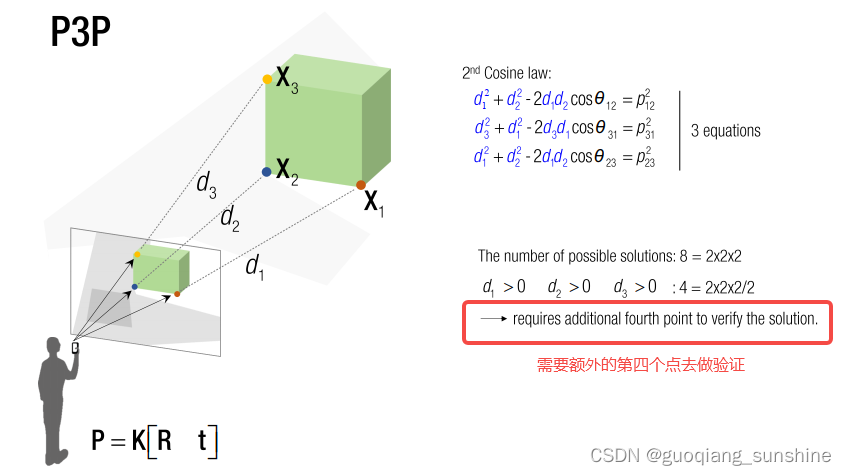
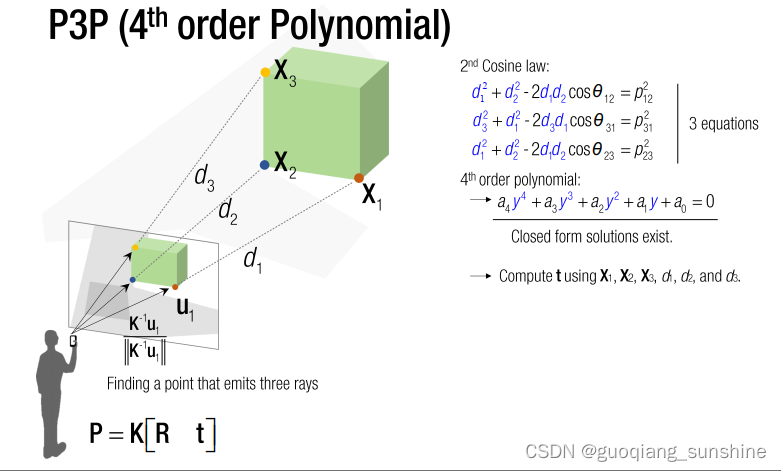
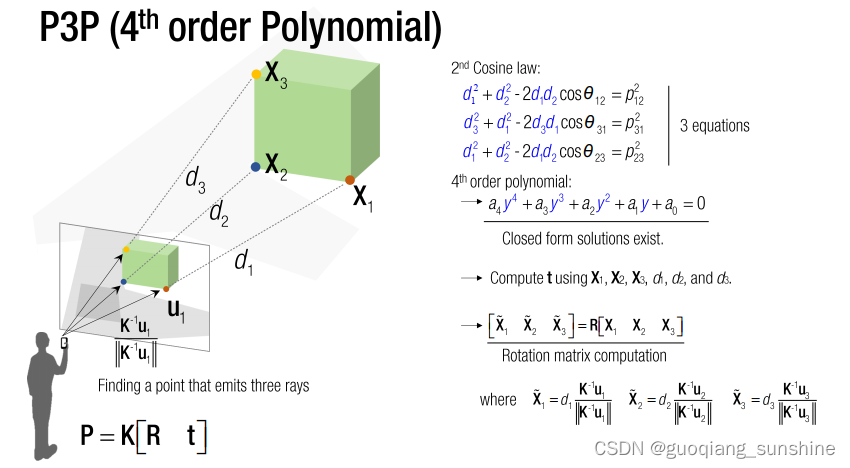
P3P求解:
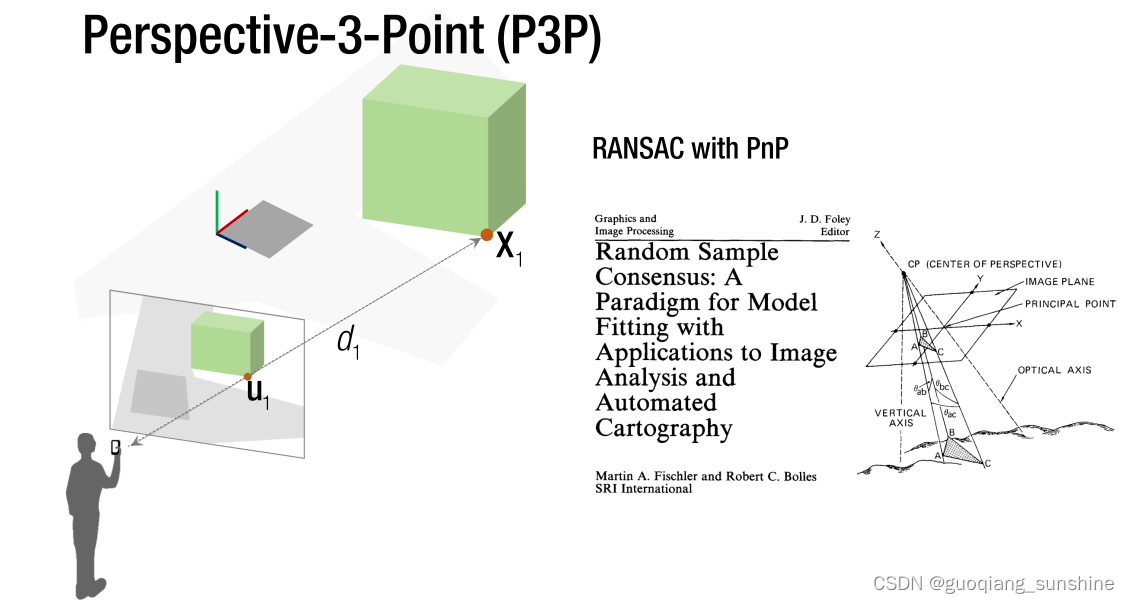
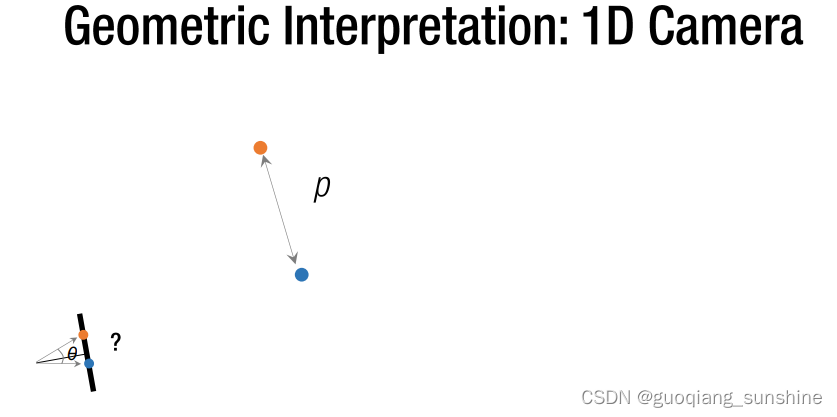
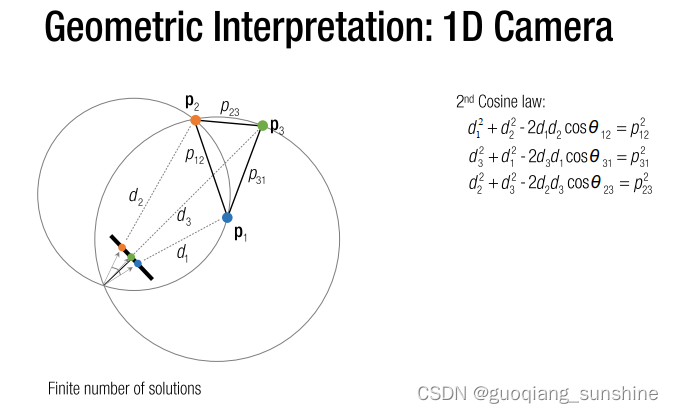
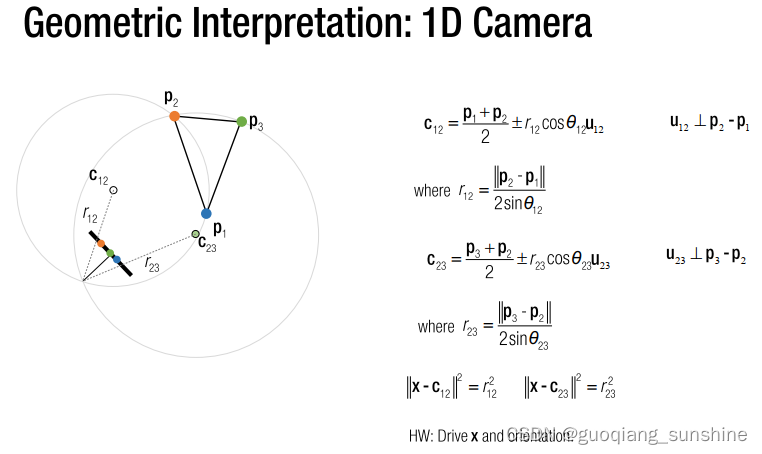
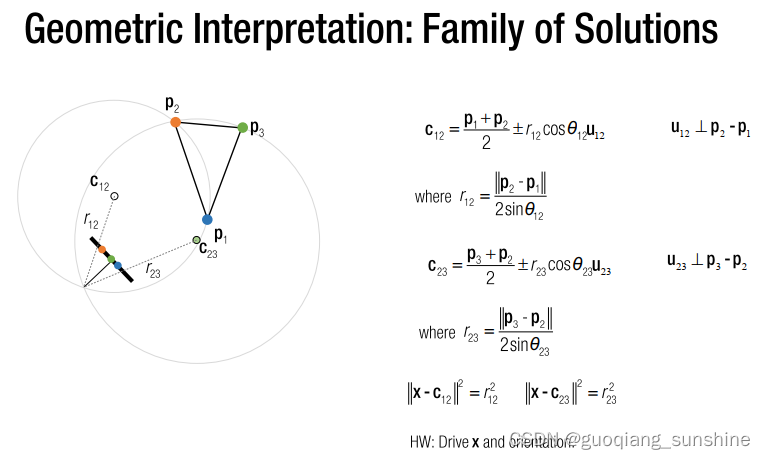
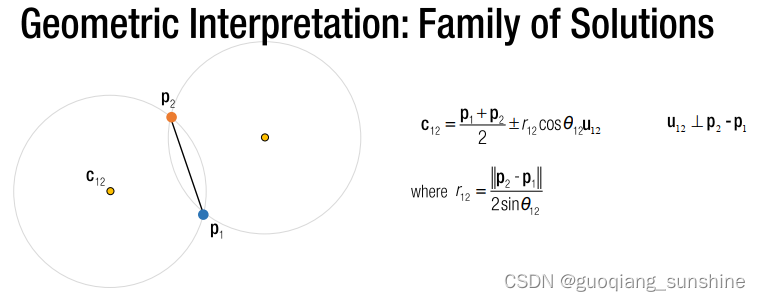
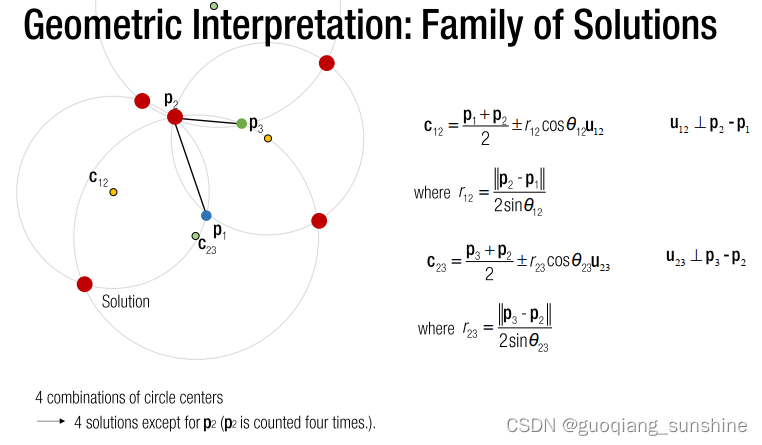
求解原理:
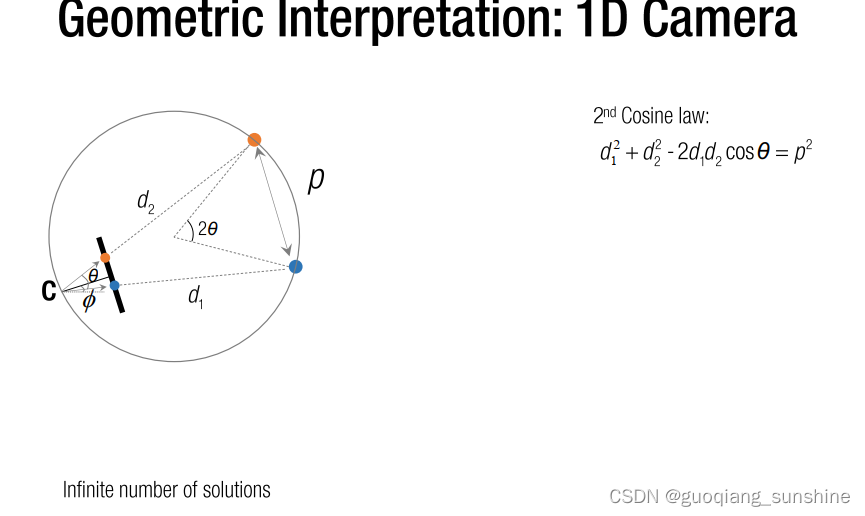
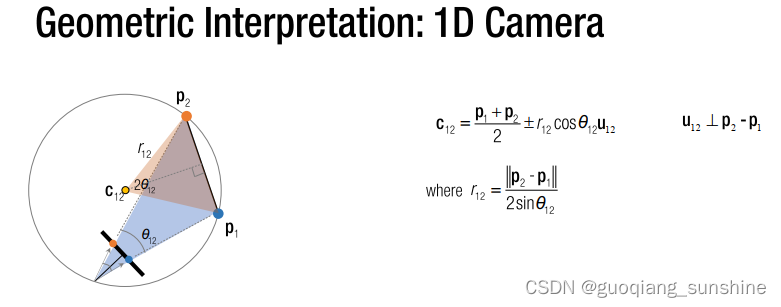
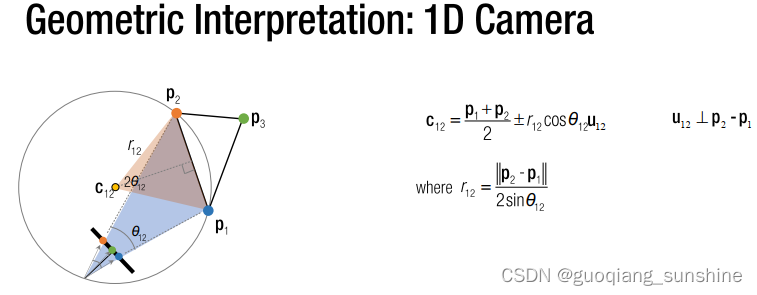
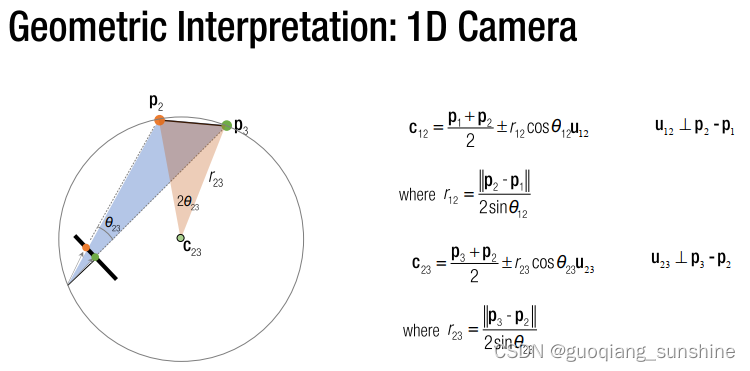
1D相机集合解释构建:
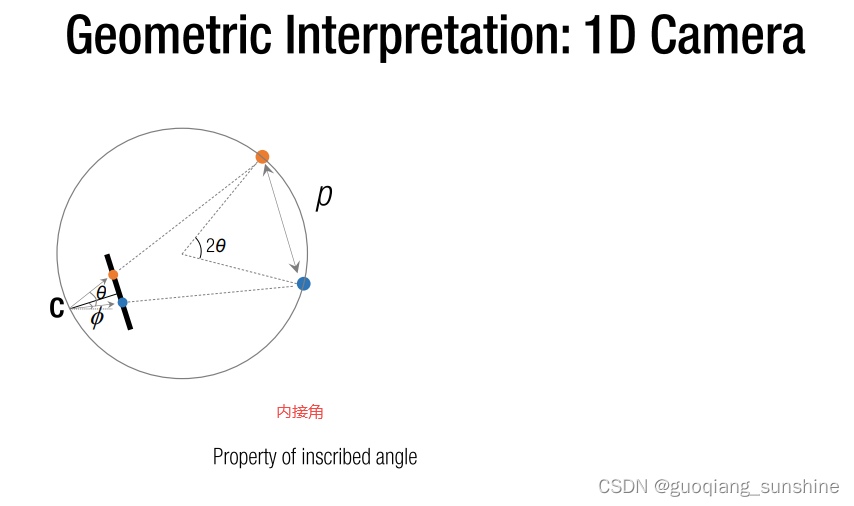
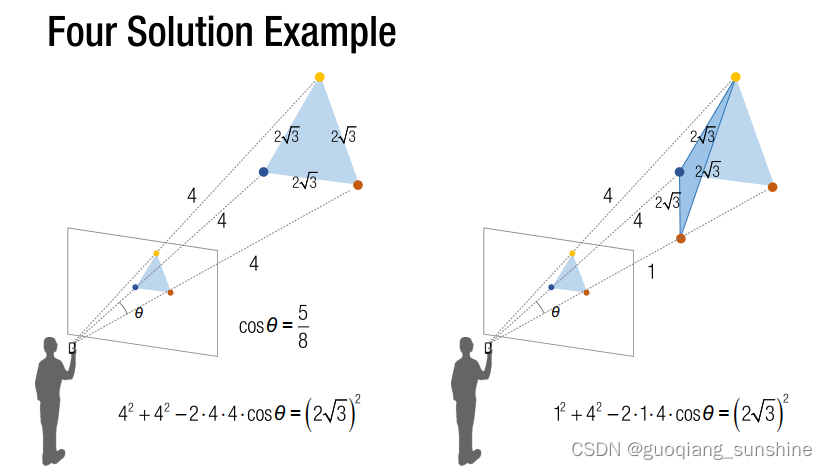
cos定理:
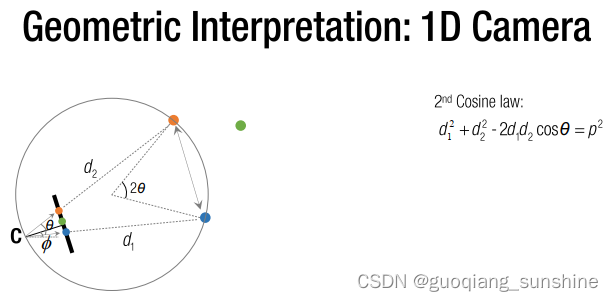
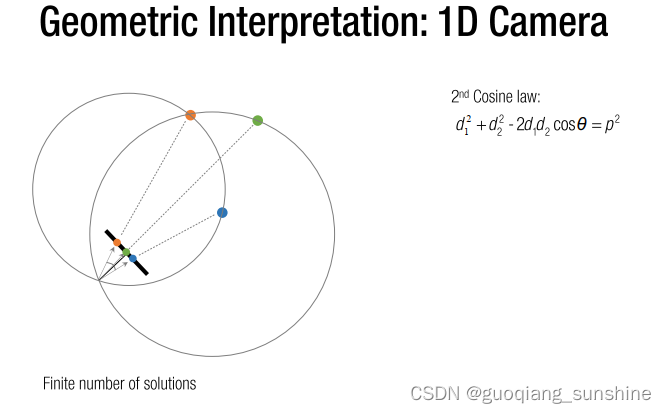
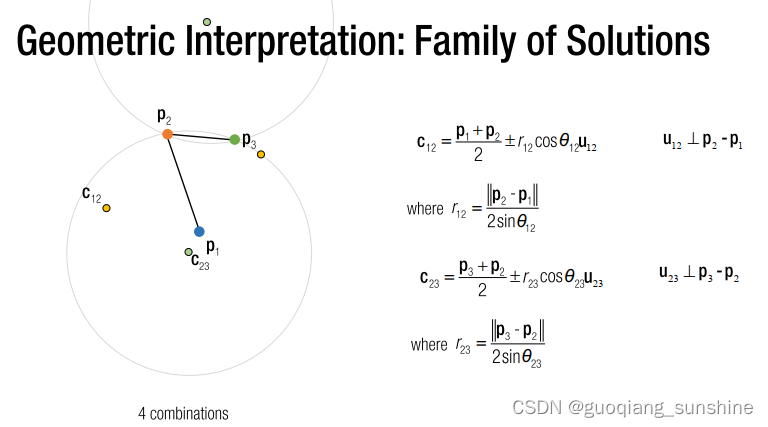
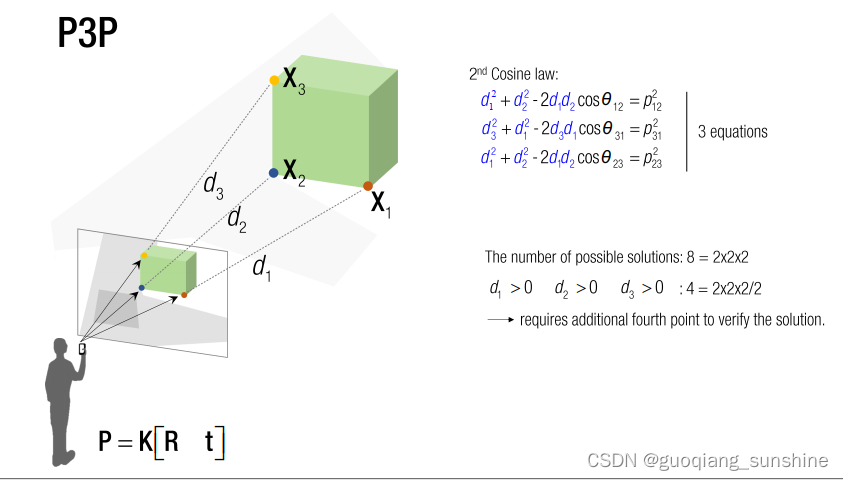
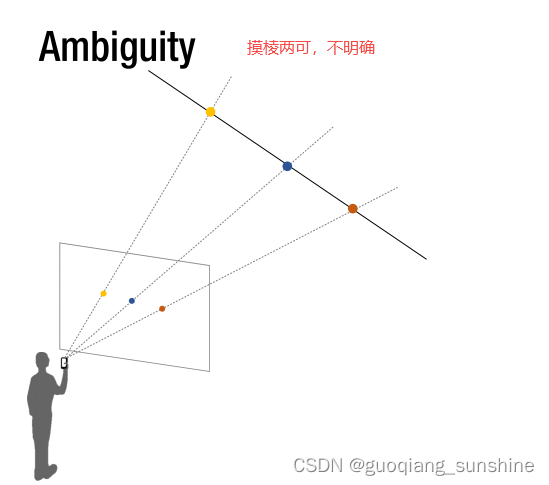
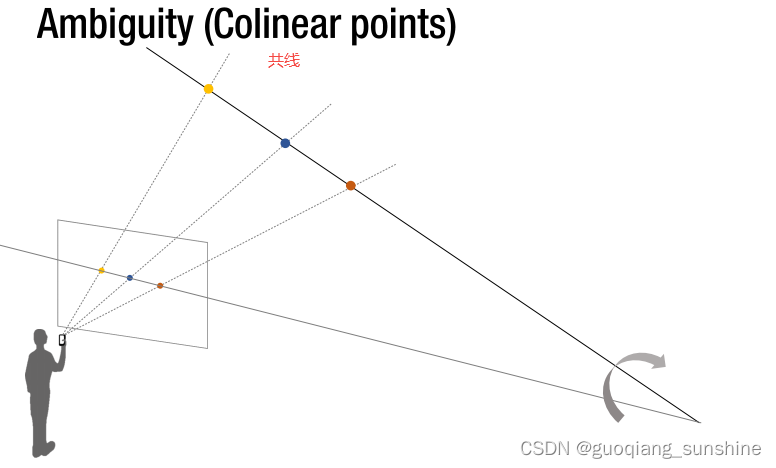
小结:P3P求解需要3组点去做解方程,另外需要至少一组点去做校验。
求解举例验证:



















 732
732



 到【灌水乐园】发言
到【灌水乐园】发言










