




 本文介绍了GTSAM库中如何利用因子图表示隐马尔可夫模型,并详细展示了使用BetweenFactor和PriorFactor构建高斯因子图的过程。重点讲解了信赖区域法(列文伯格方法)在优化估计中的应用,通过实际代码演示了如何使用LevenbergMarquardtOptimizer进行最小二乘求解。最后,展示了如何计算变量的边缘概率和信息量。
本文介绍了GTSAM库中如何利用因子图表示隐马尔可夫模型,并详细展示了使用BetweenFactor和PriorFactor构建高斯因子图的过程。重点讲解了信赖区域法(列文伯格方法)在优化估计中的应用,通过实际代码演示了如何使用LevenbergMarquardtOptimizer进行最小二乘求解。最后,展示了如何计算变量的边缘概率和信息量。
1. 因子图表达
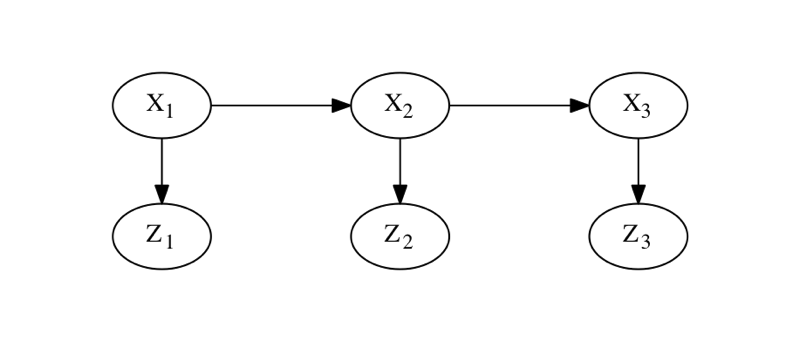
- 上图为一个HMM(隐马尔可夫链)模型

- 其因子图为(用来极大化最大后验误差):
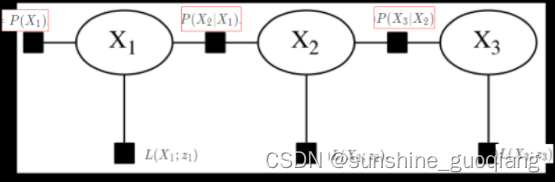
以一个马尔可夫链为例
代码:
//BetweenFactor 包含描述两个因子之间相关操作类
// 和初始状态概率矩阵
#include <gtsam/slam/BetweenFactor.h>
//误差
#include <gtsam/slam/PriorFactor.h>
//非线性
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
//列文伯格求解方程组
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
//Pose2 类库 把3d点用作(x,y,theta)表示
#include <gtsam/geometry/Pose2.h>
#include <iostream>
//计算边缘分布
#include <gtsam/nonlinear/Marginals.h>
//指定列文伯格迭代的初始值
#include <gtsam/nonlinear/Values.h>
#include <gtsam/base/Vector.h>
#include <CppUnitLite/TestHarness.h>// 单元测试库
#include <boost/shared_ptr.hpp>
#include <boost/assign/std/list.hpp>
using namespace std;
using namespace gtsam;
int main(int argc, const char** argv) {
NonlinearFactorGraph graph;//高斯因子图
//3d点
Pose2 priorMean(0,0,0);//先验值 x,y,theta
//Pose2(Point2,Rot2):位置姿态
//Rot2(cos(theta),sin(theta)):夹角的余弦值和正弦值
//添加噪声,替他还有gussian,Robust、Unit 噪声
noiseModel::Diagonal::shared_ptr priorNoise=noiseModel::Diagonal::Sigmas(Vector3(0.3,0.3,0.1));
//Eigen::Vector3
//sigma函数:1/(1+e^(-z))
noiseModel::Diagonal::shared_ptr odometryNoise = noiseModel::Diagonal::Sigmas(Vector3(0.2, 0.2, 0.1));
//在因子图中添加因子(//初始化)
//graph.add(PriorFactor<Pose2>(1,priorMean,odometryNoise));//添加单个
graph.emplace_shared<PriorFactor<Pose2> >(1,priorMean,priorNoise);//可以添加多个
//1 因子图顺序 priorMean 数据 odometryNoise 噪声
Pose2 odometry(2.0,0,0);
graph.emplace_shared<BetweenFactor<Pose2> >(1,2,odometry,odometryNoise);
//t-1:1,t:2 odometry数据,odometryNoise噪声
graph.emplace_shared<BetweenFactor<Pose2> >(2,3,odometry,odometryNoise);
graph.print("\nFactor Graph:\n");//等价与print
Values initial;
//初始化观测矩阵
initial.insert(1, Pose2(0.5, 0.0, 0.2));//插入观测数据
initial.insert(2, Pose2(2.3, 0.1, -0.2));
initial.insert(3, Pose2(4.1, 0.1, 0.1));
initial.print("\nInitial Estimate:\n"); // print
//使用列文伯格迭代求解最小二乘:min(z-gussan(x+w)-gussan(y+v)+gussan(z+e))
Values result=LevenbergMarquardtOptimizer(graph,initial).optimize();//经过三次迭代后的预测值
result.print("Final Result:\n");
//cout<<"date"<<result.find(1)<<endl;
//cout<<<"result:"<<<<endl;
cout.precision(2);//精度 streamsize设为2,小数点后两为
//计算非线性因子图中变量的高斯边缘概率
Marginals marginals(graph, result);
cout << "x1 covariance:\n" << marginals.marginalCovariance(1) << endl;
cout << "x2 covariance:\n" << marginals.marginalCovariance(2) << endl;
cout << "x3 covariance:\n" << marginals.marginalCovariance(3) << endl;
cout << "x1 marginalInformation:\n" << marginals.marginalInformation(1) << endl;
cout << "x2 marginalInformation:\n" << marginals.marginalInformation(2) << endl;
cout << "x3 marginalInformation:\n" << marginals.marginalInformation(3) << endl;
//查询优化结果
for (const gtsam::Values::ConstKeyValuePair& key_value: result )
{
cout<<"key "<<key_value.key<<endl;
Pose2 pose = key_value.value.cast<gtsam::Pose2>();//类型转换
cout<<"data:"<<pose.matrix()<<endl;
}
//遍历
for ( gtsam::NonlinearFactor::shared_ptr factor: graph )//遍历因子图节点
{
gtsam::BetweenFactor<gtsam::Pose2>::shared_ptr f = dynamic_pointer_cast<gtsam::BetweenFactor<gtsam::Pose2>>( factor );//提取边
if (f){
gtsam::SharedNoiseModel model = f->noiseModel();//提取噪声模型
gtsam::noiseModel::Diagonal::shared_ptr DiagModel = dynamic_pointer_cast<gtsam::noiseModel::Diagonal>( model );//从噪声模型提取高斯模型
if ( DiagModel )
{
gtsam::Matrix info;
gtsam::Vector DiagModel_sigma=DiagModel->sigmas();
cout<<"DiagModel_sigma:"<<DiagModel_sigma<<endl;//输出误差
Pose2 pose=f->measured();
cout<<"data:"<<pose.matrix()<<endl;//显示测量
}
}
}
return 0;
}
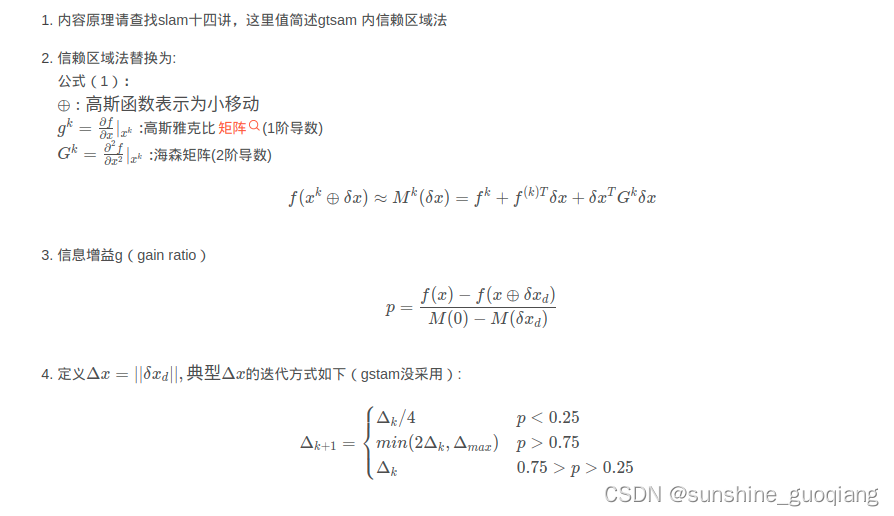
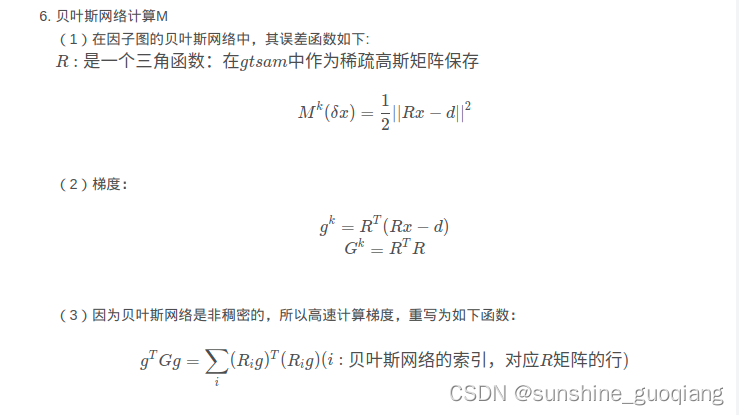
2. gstam 中的信赖区域法(或列文伯格方法)



















 121
121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











