




gtsam一个高效的后端图优化库。
- 基础知识
先要理解三个概念,因子图、贝叶斯网络、贝叶斯树。
- 1因子图
具有多变量的全局函数因子分解,得到几个局部函数的乘积,以此为基础得到的一个双向图叫做因子图.
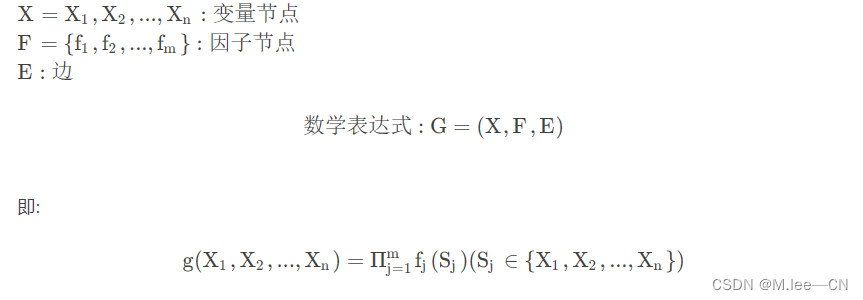
用图表示


其对应因子图为:
顶点:变量节点或函数节点,边线表示它们之间的函数关系。
gtsam一个高效的后端图优化库。
先要理解三个概念,因子图、贝叶斯网络、贝叶斯树。
具有多变量的全局函数因子分解,得到几个局部函数的乘积,以此为基础得到的一个双向图叫做因子图.
用图表示
其对应因子图为:
顶点:变量节点或函数节点,边线表示它们之间的函数关系。
 1606
844
1606
844

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















 到【灌水乐园】发言
到【灌水乐园】发言






