




 本文介绍了EVO工具包中的关键评估指标,如绝对位姿误差(ATE)和相对位姿误差(RPE),以及Umeyama算法在单目和双目SLAM中的应用。讨论了SE(3)与Sim(3)的区别,以及如何通过-evo_ape和-evo_rpe命令计算这些误差。此外,文章还涵盖了evo_config和evo_traj工具的使用,以及如何解读和比较不同设置下的性能结果。
本文介绍了EVO工具包中的关键评估指标,如绝对位姿误差(ATE)和相对位姿误差(RPE),以及Umeyama算法在单目和双目SLAM中的应用。讨论了SE(3)与Sim(3)的区别,以及如何通过-evo_ape和-evo_rpe命令计算这些误差。此外,文章还涵盖了evo_config和evo_traj工具的使用,以及如何解读和比较不同设置下的性能结果。
1. 基本概念
1.1 Umeyama算法
ATE:
evo_ape tum state_groundtruth_estimate0/data.tum orb2/CameraTrajectory.txt -r trans_part -va --plot --plot_mode xy --save_results /home/sun/evo/v1_01_easy/orb2/ate.zip
RPE:
evo_rpe tum state_groundtruth_estimate0/data.tum orb2/CameraTrajectory.txt -r full --delta 1 --delta_unit m -va --plot --plot_mode xy --save_results /home/sun/evo/v1_01_easy/orb2/rpe.zip
1.2 SE(3)与Sim(3)
双目SLAM和RGB-D SLAM,尺度统一,因此我们需要通过最小二乘法计算一个从估计位姿到真实位姿的转换矩阵 [公式] 对于单目相机,具有尺度不确定性,我们需要计算一个从估计位姿 [公式] 到真实位姿 [公式] 的相似变换矩阵 [公式] 。在evo代码中,给予 --correct_scale命令就会估计Sim,否则默认为SE(3)。
2. 测试标准机器含义
1. evo_ape 计算绝对位姿误差
evo_ape tum data.tum pos_and_quate.txt -r full -va --plot --plot_mode xyz --save_results /home/sun/evo/mh_01_easy/ours.zip
-r full/rot_part/…
计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,其中-r表示ape所基于的姿态关系不添加-r/–pose_relation和可选项,则默认为trans_part。
1.1 metrics解析
上文提到pose error包含平移和旋转两部分误差,在evo中的option为-r,–pose_relation,并有如下模式:

其中trans_part很容易理解,但是无单位的full和rot_part的误差指标比较特殊,使用了矩阵的二范数:
error_full=∥δT_i − E∥, \̲d̲e̲l̲t̲a̲T̲_i表示groundtruth和estimate位姿之间的变换矩阵,E 为单位阵,矩阵的范数也可以表示某种抽象的空间距离
同理rot_part的误差:
ERROR_rot = ∥ δR_i − E ∥
相比较而言,用平移误差单位为m,旋转误差单位可以是度或弧度,更容易理解。从旋转矩阵R 到旋转角的转换使用了罗德里格斯公式(旋转向量的二范数为旋转角的大小)。
-v表示verbose mode,详细模式,-a表示采用SE(3) Umeyama对齐,其余可选项如下表所示。不加-s表示默认尺度对齐参数为1.0,即不进行尺度对齐。

2. evo_rpe 计算相对位姿误差
相对位姿误差不进行绝对位姿的比较,相对位姿误差比较运动(姿态增量)。相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。
evo_rpe tum data.tum pos_and_quate.txt -r angle_deg --delta 1 --delta_unit m -va --plot --plot_mode xz --save_plot ./VIO --save_results /home/sun/evo/mh_01_easy/ours_rpe.zip
命令的含义为 求每米考虑旋转角的rpe,以详细模式显示并画图。
其中-r表示ape所基于的姿态关系

不添加-r/–pose_relation和可选项,则默认为trans_part。
–d/–delta表示相对位姿之间的增量,–u/–delta_unit表示增量的单位,可选参数为[f, d, r, m],分别表示[frames, deg, rad, meters]。–d/–delta -u/–delta_unit合起来表示衡量局部精度的单位,如每米,每弧度,每百米等。其中–delta_unit为f时,–delta的参数必须为整形,其余情况下可以为浮点型。–delta 默认为1,–delta_unit默认为f。
当在命令中加上–all_pairs,则计算rpe时使用位置数据中所有的对而不是仅连续对,此时,可以通过-t/–delta_tol控制–all_pairs模式下的相对增量的容差(relative delta tolerance)。需要注意–all_pairs下不能使用–plot函数。
3. evo_config 全局设置和配置文件操作
evo_config set 进行参数设置
下面是几个常用的参数,其含义以及可选项
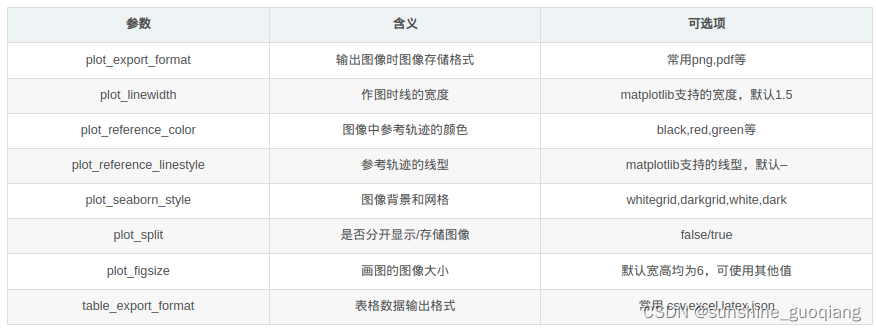
例如命令
evo_config set plot_seaborn_style whitegrid 将画图背景更改成白色网格
evo_config set plot_fontfamily serif plot_fontscale 1.2 将字体改为衬线型并调为1.2倍大小
evo_config set plot_reference_linestyle - 将画图所使用的线型改为 -
evo_config set plot_figsize 10 9 将所画图的图像大小调整为10 9(宽 高)
evo_config reset 将参数还原到默认值
evo_config generate 将命令行参数转换成–out指定的.json文件
例如:evo_config generate --pose_relation angle_deg --delta 1 --delta_unit m --verbose --plot --out rpe_config.json
4. evo_traj 轨迹管理的主要工具
evo_traj可以打开任意多个轨迹,查看统计信息。-v表示以详细模式显示,–full_check可以对轨迹进行检查。=
evo_traj euroc MH_data1.csv MH_data3.csv -v --full_check
如果需要将轨迹对齐(-a/ --align, -s / --correct_scale, --n_to_align),则需要利–ref指定参考轨迹。例如evo_traj bag ROS_example.bag ORB-SLAM S-PTAM --ref groundtruth -s
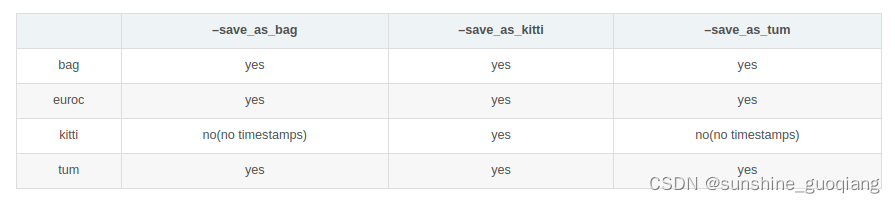
因euroc格式只对euroc数据集的groundtruth数据有意义,所以没有–save_as_euroc。
evo_traj euroc data.csv --save_as_tum
可通过 evo_traj +数据格式 + --help查看更多参数的含义以及如何使用。例如
evo_traj euroc --help
5. evo_res 进行结果比较
evo_res --help可查看可选参数含义。
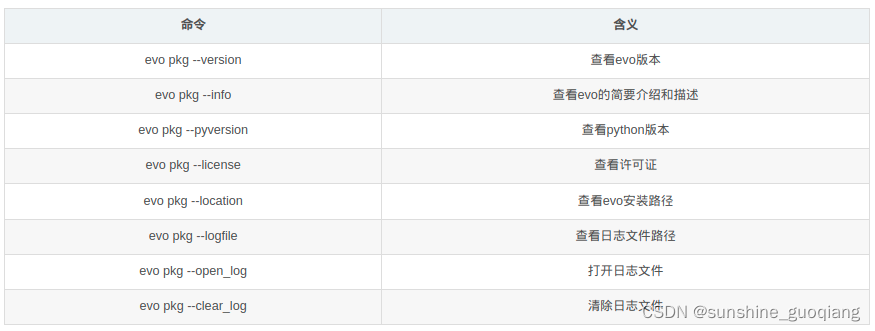
evo其他常用命令
3. ref
- https://github.com/MichaelGrupp/evo/wiki/evo_traj
- https://github.com/MichaelGrupp/evo/wiki
- https://github.com/MichaelGrupp/evo
- 【SLAM】评估轨迹误差,手写ATE、RPE对比EVO



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











