




 本文分享了一种智能车竞赛中的元素识别方案,通过锁定不同赛道元素的方式提高识别准确性,减少误判,适用于初次参赛者。
本文分享了一种智能车竞赛中的元素识别方案,通过锁定不同赛道元素的方式提高识别准确性,减少误判,适用于初次参赛者。
今天给大家分享一个智能车竞赛的元素方案,我们组队员都是第一次参赛,略微有些经验不足最后只拿了省二的成绩,但是还是有些不错的方案可以分享下。
下面贴一张17届的线上赛道图片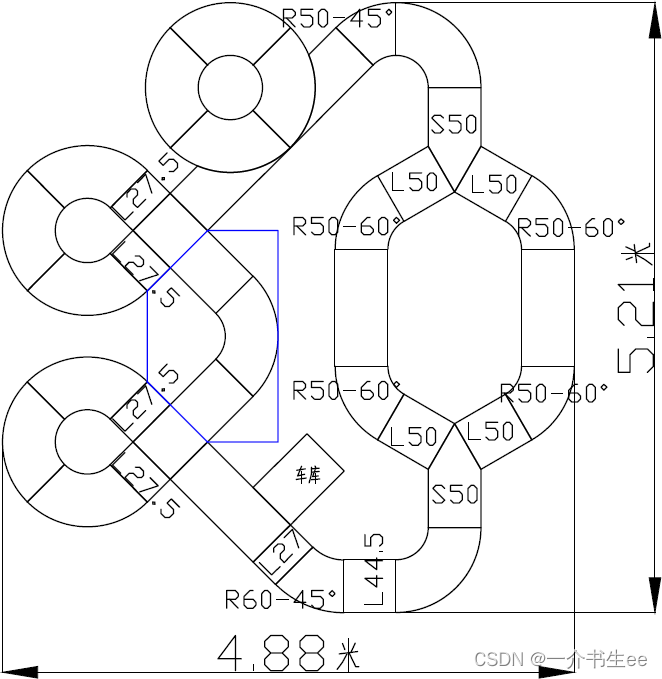
以摄像头车顺时针方向跑为例,元素顺序依次为斑马线 > 十字路口 > 左环 > 三叉 最后斑马线车辆跑完一圈,当我们吧所有元素的识别都完成之后会发现,有时候会在十字路口误判三叉,当车辆速度较快,姿态不是很稳定时,非常容易在十字掉头;
以我们之前的方案将所有元素都放在路径判断的程序中识别,识别到相应元素,这种方案很明显简单,容易实现,但出错率也高;因此我们便采用的锁元素,即给每个元素都加一个标号,程序每次路径判断只判断一种元素,元素完成之后将判断改成下一个元素的标号;
简单理解就是:小车从车库出发,此时元素只判断十字路口,跑完两个十字之后开启左环的判断关闭十字的判断(每次只判断一种元素),依次左环出环之后开启三叉的判断,第二次出三叉之后开启斑马线的判断;
这种方案的优势就是相对比较稳定,元素的识别比较准确,当然前提肯定要元素本身识别准确,而锁
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6491
6491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









