




1.介绍
AVOD(Aggregate View Object Detection)算法和MV3D算法在思路上非常相似,甚至可以说,AVOD是MV3D的升级版本
总的来说,和MV3D相比,AVOD主要做了以下一些改进:
(1)MV3D中使用VGG16的一部分进行特征提取。在AVOD中,作者使用了引入FPN层的Encoder-Decoder结构进行高分辨率点云和图片特征提取(如下图示);
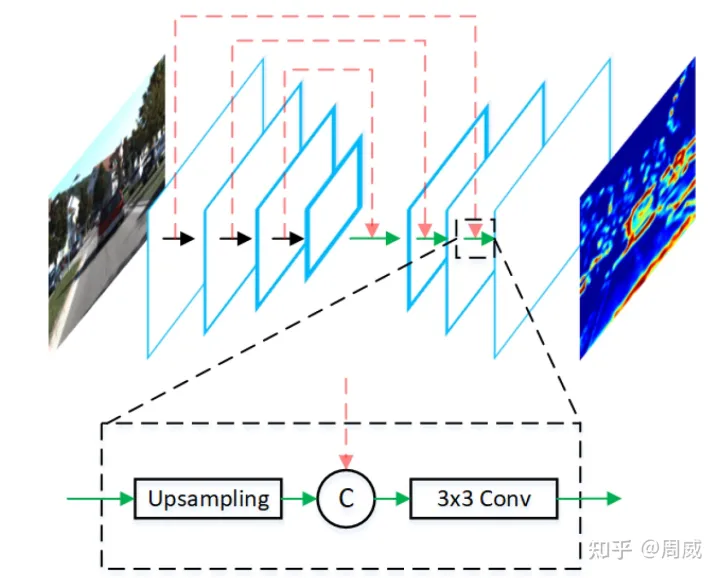 图1 AVOD中的特征提取层D
图1 AVOD中的特征提取层D
(2)MV3D中使用8个角点(每个角点由一个三维坐标表示)描述3D BBox。在AVOD中,作者使用4个角点(只包含x,y)和2个高度(共4*2+2=10)来描述一个3D BBox。

(3)还有一些改动我们后面再说
2 AVOD网络结构和流程
AVOD的网络结构如下图所示。
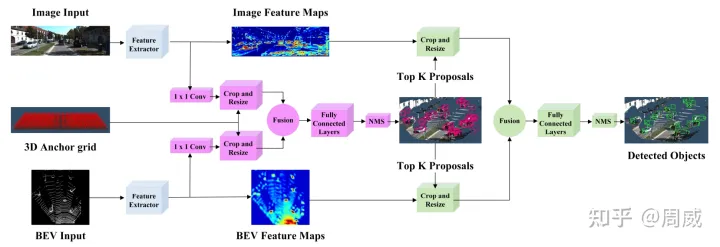
具体包括:
输入——>特征提取——>1×1卷积——>裁剪和大小缩放——>特征融合——>全连接——>NMS——>裁剪和大小缩放——>特征融合——>全连接——>NMS
2.1 输入
从图中可以看出,网络的输入有两个(并不是三个,3D Anchor grid某种意义上不算输入)。这两个输入分别为(1)图片输入;(2)俯视视角的3D点云数据。
图片数据不多说,就是前视图。BEV数据由两部分组成,分别为(1)高度图;(2)密度图。这里和MV3D不同的是,MV3D中还有强度图,AVOD作者觉得强度图的增益并不多,就把这个图给删了,这样还能降低计算量。
(a)高度图的获取方式:
选择点云数据的BEV视角[-40,40] × [0,70]的区域,划分为0.1米大小的一个个小方格(假设方格是个数是 HHH×WWW)。在每个小方格里,将高度区域为 [0,2.5] 划分为M个切片,每个切面范围内找到最大高度点云对应的高度即可。这样总共获得了 HHH×WWW×MM
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4426
4426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









