




1.前言
3D点云数据的一些主要问题可以体现在其(1)稀疏性(2)无序性(3)冗余性三个方面。
对于稀疏性,现有的一些方法喜欢引入体素(Voxel)进行三维空间的划分,然后将稀疏、无序,分布不均匀的点云数据分配于不同的体素,接着利用MLP、卷积、池化等操作实现对体素(点云)进行特征提取,很明显这种方法会引入大量的计算量。
考虑到这一点,本文要解析的MV3D并没有使用类似的方法,而是将点云数据和图片数据映射到三个不同的维度进行特征融合,然后进行物体的定位和识别。
这三个维度分别为:点云的俯视图、点云的前视图以及图片。这里值得注意的,作者融合了点云数据和图片数据,说到底,这就是一个多模态融合的问题。
MV3D的论文地址为:https://arxiv.org/abs/1611.07759
MV3D的代码地址为:https://github.com/bostondiditeam/MV3D
2. MV3D的点云处理
上面提到MV3D将点云和图片数据映射到三个维度进行融合,从而获得更准确的定位和检测的结果。这三个维度分别为点云的俯视图、点云的前视图以及图片,如下图所示。
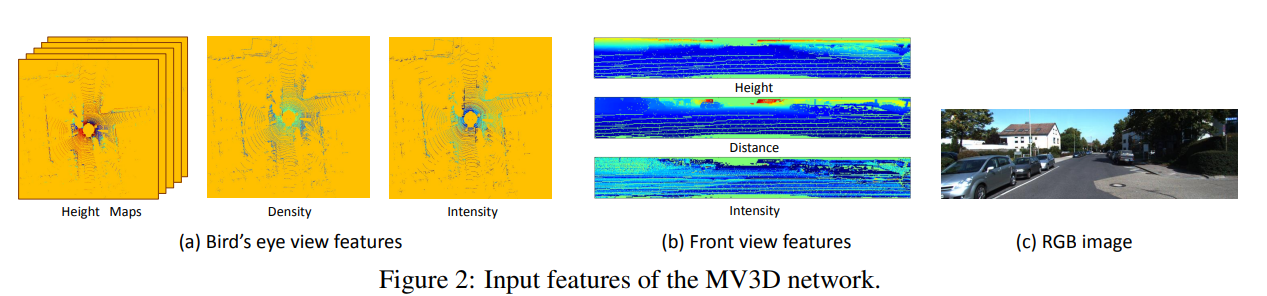
(1)点云俯视图
点云俯视图由高度、强度、密度组成。
高度图的获取方式为:作者将点云数据投影到分辨率为0.1的二维网格中,将每个网格中所有点高度的最大值记做高度特征。为了编码更多的高度特征,将点云被分为M块,每一个块都计算相应的高度图,从而获得了M个高度图。
强度图的获取方式为:仍然是分辨率为0.1的二维网格中,找到每个网络中具有最大高度的点云的反射强度,构成1个强度图。
密度图的获取方式为:统计每个单元中点云的个数,并且按照公式
进行标准化,其中N为单元中的点云个数,构成1个密度图。
那么点云俯视图的维度为 ( M + 2 M+2 M
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 42
42

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









