




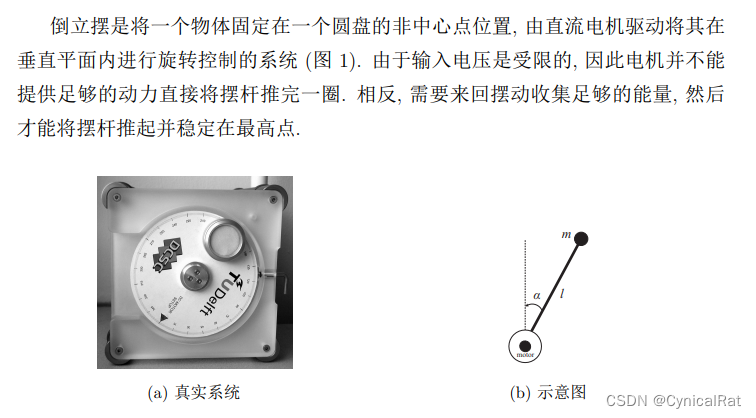
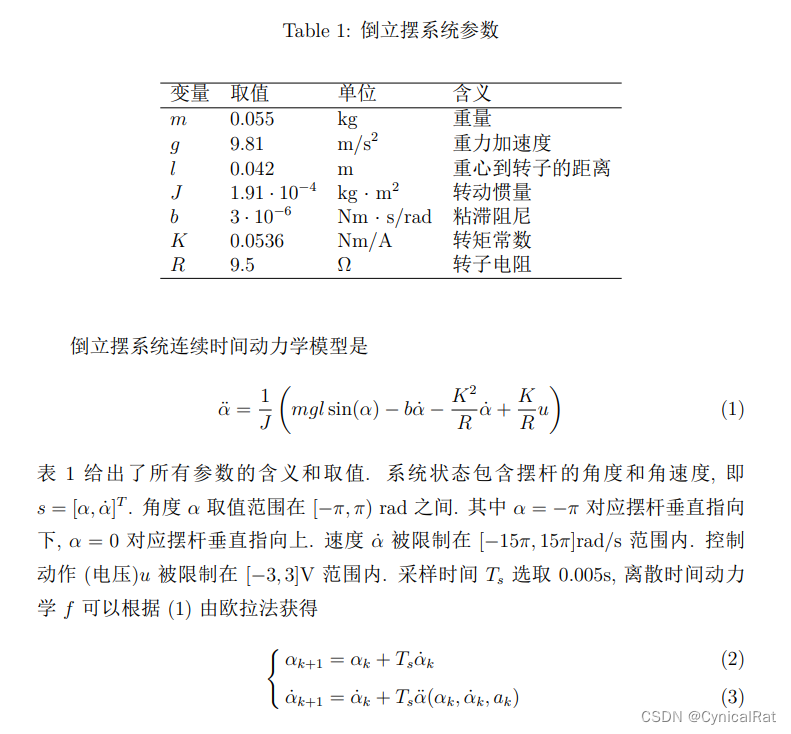
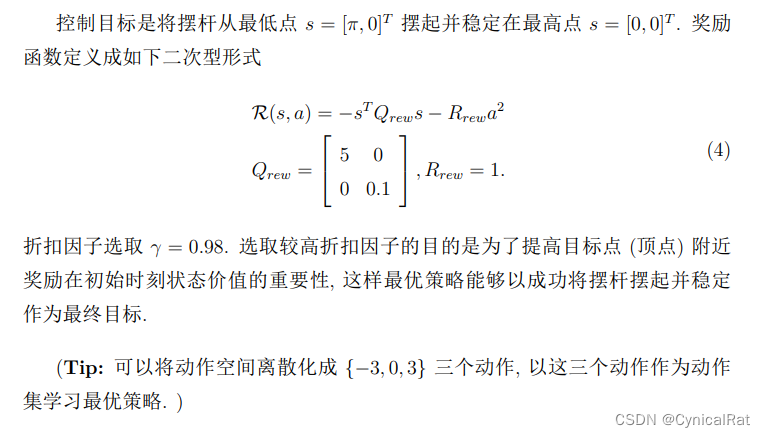
倒立摆参数以及数学模型
首先是写一个倒立摆的AGENT模型
pendulum_env.py
import numpy as np
import matplotlib.pyplot as plt
# import matplotlib
import matplotlib.animation as animation
# import IPython
class Pendulum:
"""
构建一个倒立摆环境
"""
def __init__(self):
"""
初始化
"""
# 倒立摆系统参数
self._m = 0.055 # 转子重量
self._g = 9.81 # 重力加速度
self._l = 0.042 # 重心到转子距离
self._J = 1.91e-4 # 转动惯量
self._b = 3e-6 # 粘滞阻尼
self._K = 0.0536 # 转矩常数
self._R = 9.5 # 转子电阻
# 状态维度 2维 角度angle和角速度angular
self.state_dims = 2
# 采样时间
self.Ts = 0.005
# 取值范围
self.max_anger = np.pi # 最大角度
self.max_angular = 15 * np.pi # 最大角速度
self.max_voltage = 3 # 最大电压
def get_delta_angular(self, x, u):
"""
获取倒立摆角加速度
:param x: 该时刻输入状态 [角度,角速度]
:param u: 该时刻输入电压
:return: 该时刻角加速度
"""
temp = self._m * self._g * self._l * np.sin(x[0])
_temp = (temp - self._b * x[1] - (self._K ** 2) * x[1] / self._R + self._K * u / self._R)
return _temp / self._J
def get_next_state(self, x, u):
"""
根据离散时间动力学模型获得下次状态
:param x: 该时刻输入状态 [角度,角速度]
:param u: 该时刻输入电压
:return: 下一时刻的新状态 [角度,角速度]
"""
alpha = x[0] + self.Ts * x[1]
d_alpha = x[1] + self.Ts * self.get_delta_angular(x, u)
# 校正角度
if alpha < -self.max_anger:
alpha += self.max_anger
elif alpha >= self.max_anger:
alpha -= self.max_anger
# 限制角速度
if d_alpha < -self.max_angular:
d_alpha = -self.max_angular
elif d_alpha > self.max_angular:
d_alpha = self.max_angular
return np.array([alpha, d_alpha])
def action_sample(self, x, num_alpha=200, num_d_alpha=200):
"""
状态空间采样函数
:param x: 没有离散化的状态空间[角度,角速度]
:param num_alpha: 角度空间划分数量
:param num_d_alpha: 角速度空间划分数量
:return: 离散化的状态空间
"""
alpha = x[0]
d_alpha = x[1]
normal_a = (alpha + self.max_anger) % (2 * self.max_anger) - self.max_anger
indice_a = int((normal_a + self.max_anger) / (2 * self.max_anger) * num_alpha)
indice_da = int((d_alpha + self.max_angular) / (2 * self.max_angular) * num_d_alpha)
if indice_da == num_alpha:
indice_da -= 1
return np.array([indice_a, indice_da])
def get_reward(self, x, u):
"""
计算奖励信号
"""
Q_rew = np.matrix([[5, 0], [0, 0.1]])
R_rew = 1
x_ = np.matrix(x)
return -x_*Q_rew*x_.T - R_rew*(u**2)
然后是Qlearning算法,继承上面写的Pendulum
Q_learning.py
采用的是Q学习和epsilon贪心算法
import numpy as np
from matplotlib import pyplot as plt
from pendulum_env import Pendulum
class Q_learning(Pendulum):
"""
Q学习,继承自己写的环境prndulum
"""
def __init__(self, iterations=12000, gamma=0.98, lr=0.5):
super().__init__()
# 超参数
# 迭代次数
self.N = iterations
# 折扣因子
self.gamma = gamma
# 学习率
self.lr = lr
# 常量
# 动作矩阵
self.actions = np.array([-3, 0, 3])
# 初始状态
self.inite_x = np.array([-np.pi, 0])
# 控制误差 角度和角速度
self.control = np.array([0.05, 0.01])
# 探索步长限制
self.step_control = 300
def get_greedy_act(self, Q, x, epsilon):
"""
epsilon贪心搜索策略
:param Q: Q函数矩阵
:param x: 状态空间
:param epsilon: 贪心算法的参数ε
:return: 贪心策略动作下标
"""
opt_act = np.argmax(Q[:, x[0], x[1]])
if np.random.random() > epsilon:
return opt_act
else:
return np.random.choice([0, 1, 2])
def train(self, num_alpha=200, num_d_alpha=200, epsilon=1.0, decay=0.9995):
"""
训练学习
:param num_alpha: 角度离散阶数
:param num_d_alpha: 角速度离散阶数
:param epsilon: 贪心算法的参数ε
:param decay: 学习率更新参数
:return: history
"""
# 存储所有状态以及所有动作的Q函数矩阵
Q = np.zeros([3, num_alpha, num_d_alpha])
epsilon_limit = 0.01 # epsilon的下界
lr = self.lr
total_step = 0
# 最优值记录
optimal = -1e7 # 最优奖励
finalerror = 2 * np.pi # 最小误差
reward_list = []
history = {'avg rewards': [],
'avg steps': [],
'Q': [],
'locations': [],
'actions': []}
# 开始迭代
for i in range(self.N):
x = self.inite_x
count, total_reward = 0, 0
sample_x = self.action_sample(x, num_alpha, num_d_alpha)
epsilon = max(decay * epsilon, epsilon_limit)
lr = decay * lr
locations, total_acts = [], []
locations.append(x[0])
error_a = np.abs(x[0])
while count < self.step_control:
count += 1
greedy_act = self.get_greedy_act(Q, sample_x, epsilon)
next_act = self.actions[greedy_act]
total_acts.append(next_act)
# 计算reward
reward = self.get_reward(x, next_act)
# 计算下一个转移状态
new_x = self.get_next_state(x, next_act)
# 计算当前状态与目标状态的误差
error_a = np.abs(new_x[0])
# 如果满足目标就break
if np.abs(new_x[0]) < self.control[0] and np.abs(new_x[1]) < self.control[1]:
locations.append(new_x[0])
break
# 对新状态采样
new_sample_x = self.action_sample(new_x, num_alpha, num_d_alpha)
# 计算Q函数
max_newQa = np.max(Q[:, new_sample_x[0], new_sample_x[1]])
delta = reward + self.gamma * max_newQa - Q[greedy_act][sample_x[0]][sample_x[1]]
Q[greedy_act][sample_x[0]][sample_x[1]] += lr * delta
# 更新状态
x, sample_x = new_x, new_sample_x
locations.append(x[0]) # 记录下一个角度
total_reward += reward # 记录reward值
reward_list.append(total_reward)
avg_reward = np.mean(reward_list[-100:])
total_step += count
avg_step = total_step / 100
# 历史记录
history['avg rewards'].append(avg_reward)
history['avg steps'].append(avg_step)
history['Q'].append(Q)
history['locations'].append(locations)
history['actions'].append(total_acts)
# 若该次迭代优于上次或奖励更高,则更新最佳值
if count < self.step_control:
# if error_a < finalerror or (error_a == finalerror and total_reward > optimal):
if error_a < finalerror or total_reward > optimal:
optimal, finalerror = total_reward, error_a
# 每100次打印信息
if (i + 1) % 100 == 0:
print("* Episode {}/{} ** Avg Step is ==> {} ** Avg Reward is ==> {} *".format(i + 1, self.N,
avg_step,
avg_reward))
total_step = 0
print("最终距离稳定状态角度误差为:%f rad" % np.abs(locations[-1]))
return history
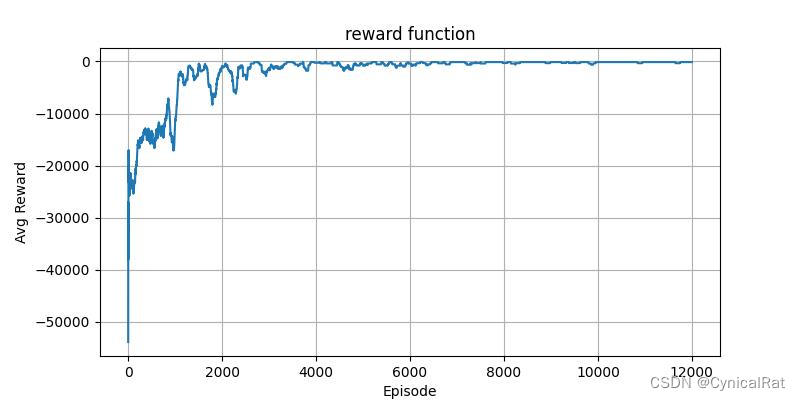
def plot_reward(self, history, reward=True, step=True):
"""
绘制历史信息
:param history: 历史记录
:param reward: 价值函数标志位
:param step: 更新步长标志位
:return:
"""
if reward:
plt.figure(figsize=(8, 4))
plt.title("reward function")
plt.plot(np.array(history['avg rewards']).reshape(-1))
plt.xlabel("Episode")
plt.ylabel("Avg Reward")
plt.grid()
plt.savefig('rewards.jpg')
plt.show()
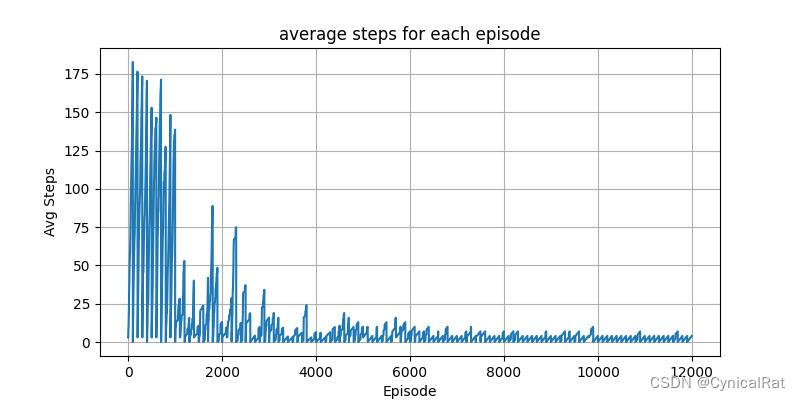
if step:
plt.figure(figsize=(8, 4))
plt.title("average steps for each episode")
plt.plot(np.array(history['avg steps']).reshape(-1))
plt.xlabel("Episode")
plt.ylabel("Avg Steps")
plt.grid()
plt.savefig('steps.jpg')
plt.show()
q = Q_learning(iterations=12000, lr=0.5)
History = q.train(epsilon=0.5)
# print(History['avg rewards'])
q.plot_reward(History)
# print(History['actions'][:10])
# print(History['actions'][-10:])
最后的可视化结果
后面还会尝试实现SARSA、DQN等等算法,持续更新中....

















 1695
1695



 到【灌水乐园】发言
到【灌水乐园】发言








