



 Abnormal_Traffic_HWP是一款专注于高速公路交通环境仿真的软件,支持自动驾驶算法的测试与评估,以及交通流的分析和评估。它提供两种场景模型获取方式,并要求自建地图仅包含主干道、汇入/出节点,无十字路口和交通信号灯。此外,软件能输出交通模型数据,包括车辆轨迹、路网拓扑和交通设施状态,便于用户进行二次分析和评估。
Abnormal_Traffic_HWP是一款专注于高速公路交通环境仿真的软件,支持自动驾驶算法的测试与评估,以及交通流的分析和评估。它提供两种场景模型获取方式,并要求自建地图仅包含主干道、汇入/出节点,无十字路口和交通信号灯。此外,软件能输出交通模型数据,包括车辆轨迹、路网拓扑和交通设施状态,便于用户进行二次分析和评估。
Abnormal_Traffic_HWP支持典型高速公路下的交通环境仿真,其宏观和微观表现更符合中国交通的驾驶特性。目前软件提供的交通接口和交通流主要支持两个应用方向:1. 用于自动驾驶算法的测试和评估;2. 用于分析和评估测试交通流的属性和特征。
用于自动驾驶算法的测试和评估
场景模型可以由两种方式获得,方式一是使用PanoSim内置的场景模型,方式二是通过WorldBuilder编辑获得场景模型。如果使用自研模型Abnormal_Traffic_HWP,用户只能选择Abnormal_TrafficFlow_HWP场景文件,如用户需要自行构建地图文件,由于Abnormal_Traffic_HWP的设计针对于高速公路环境,需要保证所构建地图文件只包括主干道、汇入型节点和汇出型节点,不能含有十字交叉路口且不能配置交通信号灯。
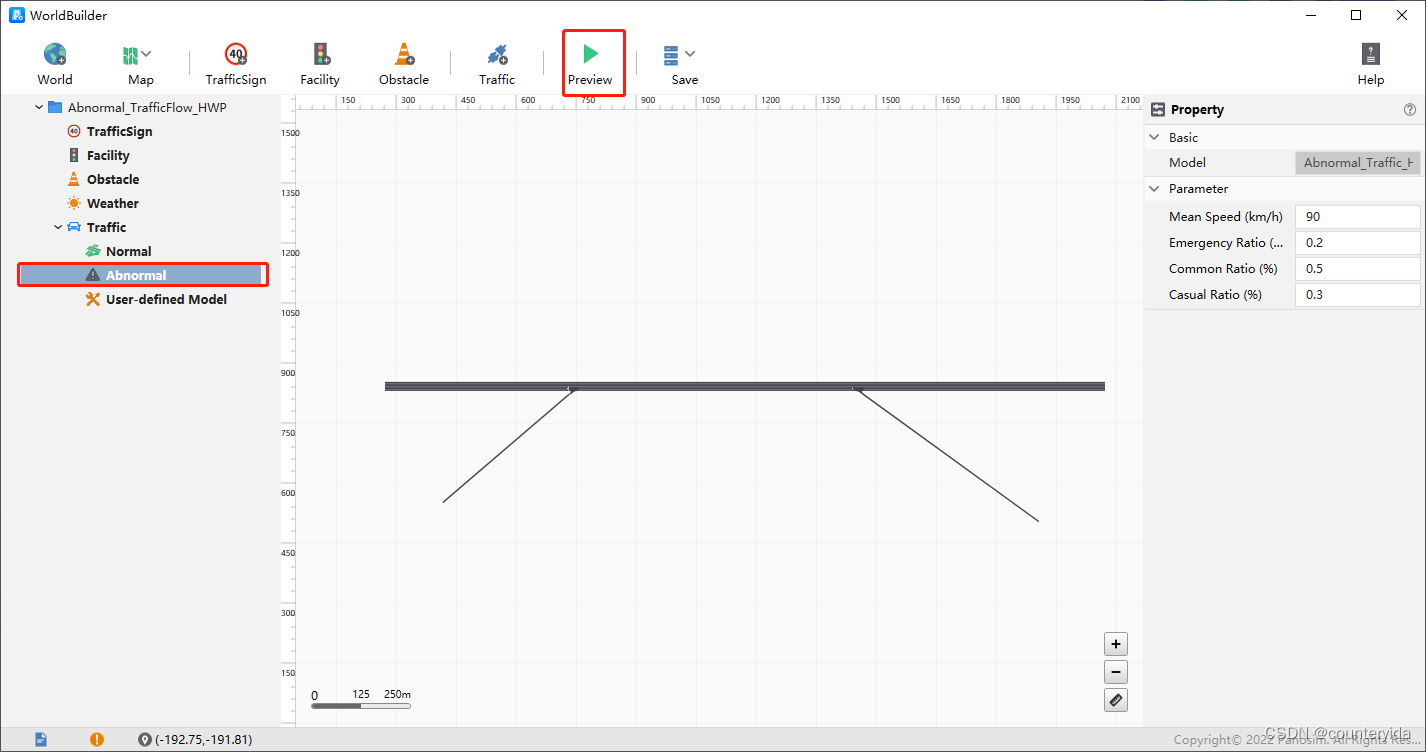
用于交通环境的分析和评估
配置交通流的方法和用于自动驾驶算法的测试和评估中产生交通流的方法一致,用户在WorldBuilder中进行设置场地后,选择软件自带的交通模型或者自定义的交通模型,设置场景交通参数后,点击Preview后,系统会启动软件资源,形成交通仿真效果。
PanoSim支持交通模型的仿真数据输出,包括:车辆轨迹数据、路网拓扑数据、以及交通设施状态数据,自定义交通模型初始化参数可通过模型参数面板设置,包括交通流的宏观参数和驾驶员以及车辆等微观特性等。目前除了在UI界面展示交通模型的效果外,软件还支持输出交通模型仿真的交通车轨迹数据,包括车辆自身状态,路网拓扑数据以及交通设施和状态等,用于用户使用轨迹数据进行自动驾驶算法或场景构建算法的二次分析和评估。

















 3434
3434

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









